Известны копировально-фрезерные станки, в которых копировальный палец выполнен сплошным, а перемещение изделия и копира осуществляется механически посредством вынесенной на пульт управления рукоятки.
Цель изобретения -облегчение управления станком и повышение точности обработки. Для этого внутри копировального пальца установлен рычаг, воздействующий на регуляторы подач при его повороте в требуемом направлении посредством смещения установленной па рычаге сменной головки, диаметр которой выбран в соответствии с заданным режимом работы.
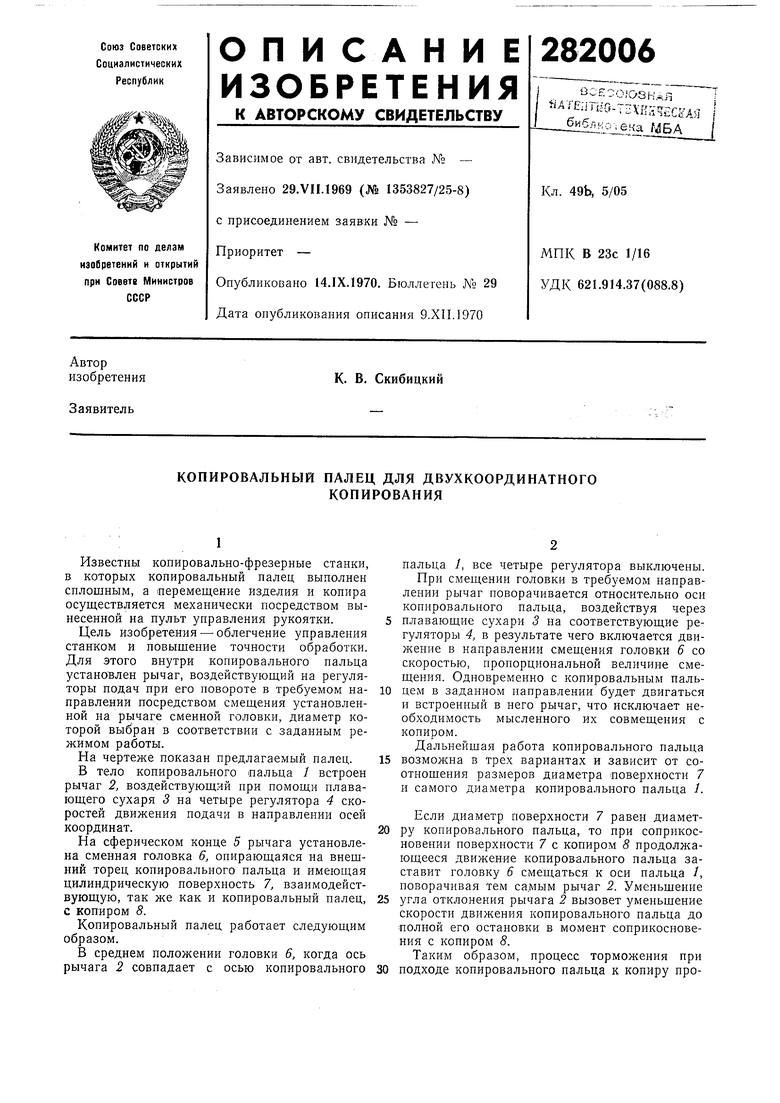
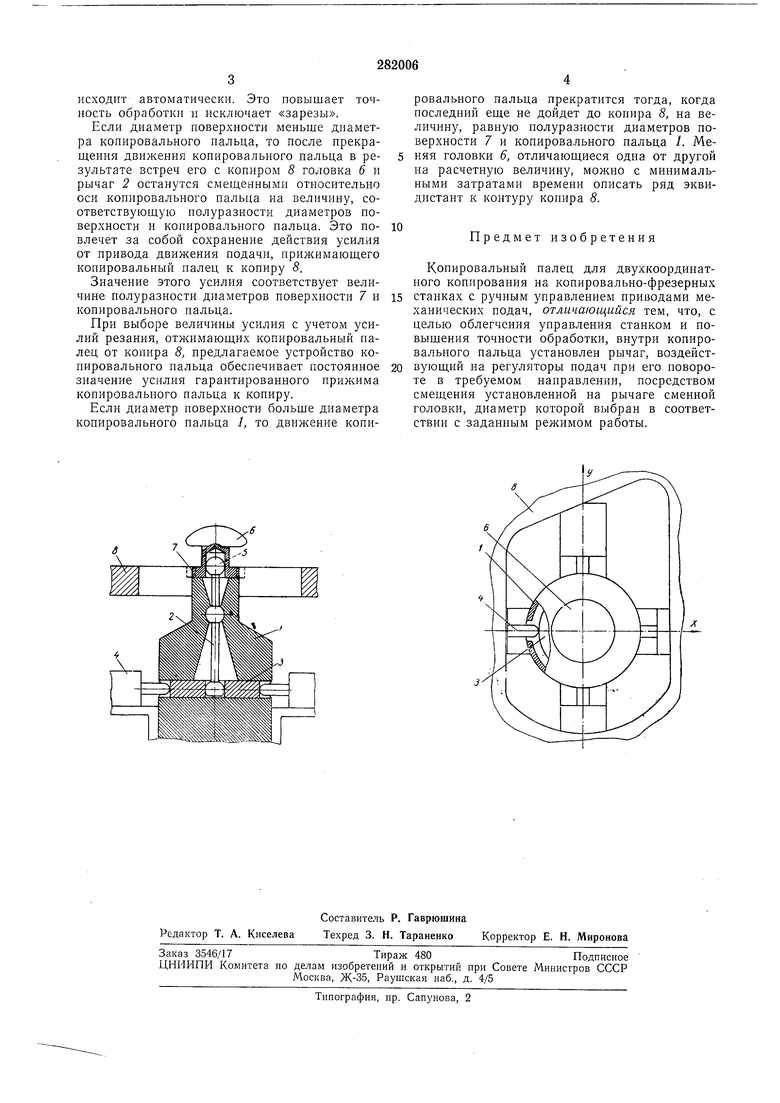
На чертеже показан предлагаемый палец.
В тело копировального пальца / встроен рычаг 2, воздействующий при помощи плавающего сухаря 3 на четыре регулятора 4 скоростей движения подачи в направлении осей координат.
На сферическом конце 5 рычага установлена сменная головка 6, опирающаяся па внешний торец копировального пальца и имеющая цилиндрическую поверхпость 7, взаимодействующую, так же как и копировальный палец, с копиром 5.
Копировальный палец работает следующим образом.
пальца /, все четыре регулятора выключены. При смещении головки в требуемом направлении рычаг поворачивается относительно оси копировального пальца, воздействуя через плавающие сухари 3 на соответствующие регуляторы 4, в результате чего включается движение в направлении смещения головки 6 со скоростью, пропорциональной величине смещения. Одновременно с копировальным пальцем в заданном направлении будет двигаться и встроенный в него рычаг, что исключает необходимость Д1ысленного их совмещения с копиром.
Дальнейшая работа копировального пальца
возможна в трех вариантах и зависит от соотнощения размеров диаметра поверхности 7 и самого диаметра копировального пальца L
Если диаметр поверхности 7 равен диаметру копировального пальца, то при соприкосновении поверхности 7 с копиром 8 продолжающееся движение копировального пальца заставит головку 6 смещаться к оси пальца 1, поворачивая тем самым рычаг 2. Уменьшение угла отклонения рычага 2 вызовет уменьшение скорости движения копировального пальца до полной его остановки в момент соприкосновения с копиром 8.
исходит автоматически. Это повышает точность обработки TI исключает «зарезы.
Если диаметр поверхности меньше диаметра копировального пальца, то после прекращения движения копировального пальца в результате встреч его с копиром 8 головка 6 и рычаг 2 останутся смещенными относительно оси копировального пальца на величину, соответствующую полуразности диаметров поверхности и копировального пальца. Это повлечет за собой сохранение действия усилия от привода движения подачи, прижимающего копировальный палец к копиру 8.
Значение этого усилия соответствует величине полуразности диаметров поверхности 7 и копировального иальца.
При выборе величины усилия с учетом усилий резания, отжимающих копировальный палец от копира 8, предлагаемое устройство копировального пальца обеспечивает постоянное значение усилия гарантированного прижима копировального пальца к копиру.
Если диаметр поверхности больше диаметра копировального пальца /, то движение копировального пальца прекратится тогда, когда последний еще не дойдет до копира 8, на величину, равную полуразпости диаметров поверхности 7 и копировального пальца 1. Меняя головки 6, отличающиеся одна от другой иа расчетную величину, с минимальными затратами времени описать ряд эквидпстант к контуру копира 8.
Предмет изобретения
Копировальный палец для двухкоординатного копирования на копировально-фрезерных
станках с ручным управлением приводами механических подач, отличающийся тем, что, с целью облегчения управления станком и повышения точности обработки, внутри копировального пальца установлен рычаг, воздействующий на регуляторы подач при его повороте в требуемом направлении, посредством смещения установленной на рычаге сменной головки, диаметр которой выбран в соответствии с заданным режимом работы.