Изобретение относится к станкостроению и может быть использовано при механической обработке деталей, в том числе и со сложными криволинейными новерхнос- тями, например штампов.
Цель изобретения - упрощение конструкции станка и повышение производительности за счет адаптивного регулирования подачи инструмента.
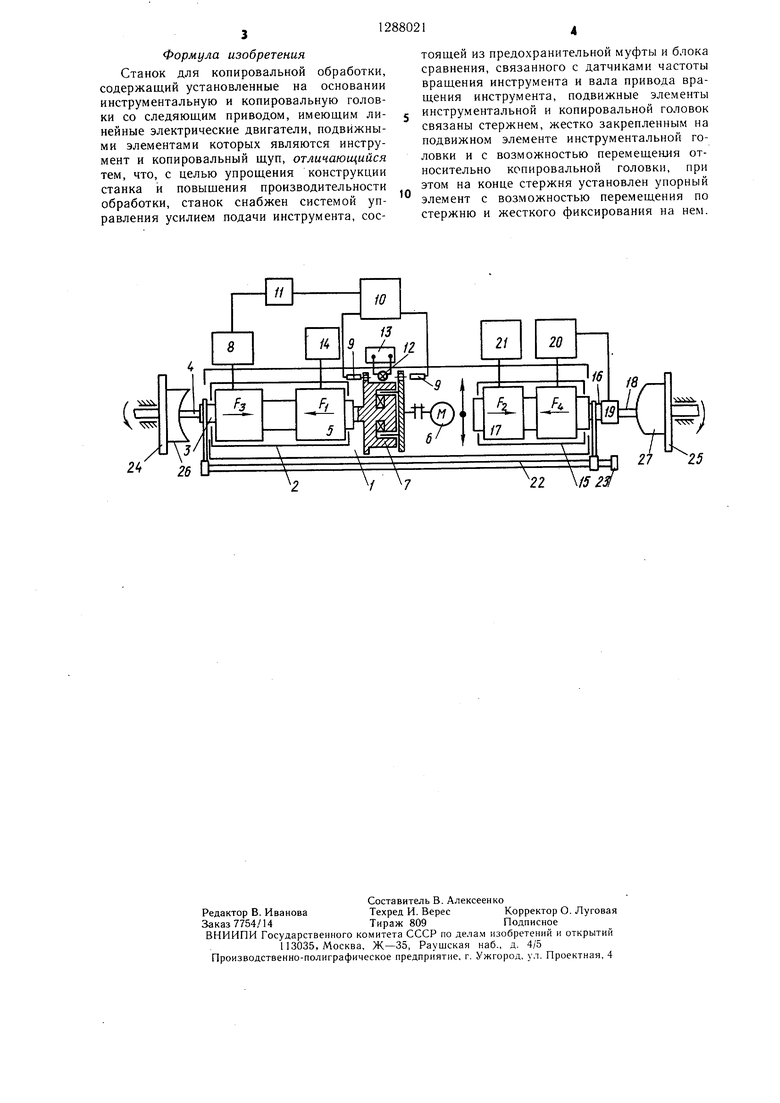
На чертеже изображена принципиальная схема станка.
Станок для копировальной обработки содержит основание 1, на котором установлена инструментальная головка 2, шпиндель 3, в котором закреплен инструмент 4, одновременно является ротором или якорем вращение инструмент 4, регулируемые ис- следящего привода 5.точники 14 и 21 питания электродинамической силы Fj, подачи инструмента и электродинамической силы PI , подачи копировального пальца. При этом электродинаЭлектродвигатель 6 соединен со шпинделем 3 инструментальной головки муфтой 7, муфта связана с блоком 8 управления, регулирующим усилие, направленное противоположно движению подачи инстру- MCirra, через датчики 9 частоты вращения инструмента и вала привода вращения инструмента, блок 10 сравнения, усилитель 11. Источник 12 света получает питание от
20
мическая сила Fj. подает копировальный
35
палец к копиру, а электродинамическая сила Fi юдает инстру.мент в зону обрабо.тки. При превышении момента резания допустимого значения прочности инстру.мента срабатывает предохранительная муфта, выпрямителя 13. Следящий привод 5 имеет. 25 настроенная на этот момент, и не передает источник 14 питания. Станок для копиро-крутящий момент с вала двигателя вращевальной обработки содержит также копировальную головку 15, закрепленную на одной оси с инструментальной головкой. Шпиндель 16 копировальной головки является ротором или якорем следящего при- 30 вода 17. Копировальный палец 18 соединен со шпинделем 16 через индуктивный датчик 19, который связан с блоком 20 управления, регулирующим усилие, направленное противоположно движению подачи копировального пальца. Следящий привод 17 имеет источник 21 питания. Шпиндели 3 и 16 соединены стержнем 22, жестко закрепленным на шпинделе 3 и свободно на шпинделе 16. На конце стержня со стороны шпинделя 16 установлен упорный элемент 23, 40 цем, но так как копировальный палец сое- имеющий возможность перемещаться подинен с подвижным элементом датчика 19
стержню и жестко фиксироваться на нем.индуктивности, то под действием силы Fj
Обрабатываемая деталь и копир закрепляются на столах 24 и 25 соответственно и получают необходимое синхронное вращение, а инструментальная и копировальная головки получают продольное перемещение (приводы вращения и перемещения не показаны) .
Станок для копировальпой обработки работает следующим образом.
Упорный элемент 23, перемещая по стержню 22, фиксируют на определенном расстоянии, при котором стержень позволяет осуществлять работу инструментальной головки независимо от копировальной головки в
процессе снятия припуска на обработку и 55 роловка отслеживает поверхность копира, жестко связывать их, когда размеры деталиа жесткая связь инструментальной и копировальной головки не позволяет инструменту осуц 1ествлять дальнейшую обработку.
ния инструмента, при этом частота вращения инструмента меньще частоты вращения двигателя. Сигнал с датчиков 9 частоты вращения поступает на блок 10 сравнения, а с блока сравнения через усилитель 11 - на блок управления электродина.мической силой F , величина которой пропорциональна асинхронности вращения инструмента и вала двигателя. При стабилизации крутяи его момента, т.е. при синхронном вращении инструмента и вала двигателя, сила F, исчезает. Таким образом происходит автоматический выбор оптимальных режимов резания. В то же время сила Fa давит на копир копировальным пальизменяется индуктивность, что фиксируется блоком 20 управления силой F, направленной противоположно движению подачи копировального пальца, величина которой изменяется пропорционально изменению индуктивности.
Инструментальная и копировальная го- 50 ловки таким образом работают отдельно друг от друга в процессе снятия припуска, но при достижении размеров детали, обратных размерам конира, упорный элемент 23 не позволяет снимать с обрабатываемой детали материал, так как копировальная
45
есть обратное отображение размеров копира.
Затем настраивают предохранительную муфту на определенный крутяш,ий момент (муфты могут быть индукционные на постоянных магнитах и электромагнитные, порошковые электромагнитные, а также механические предохранительные муфты, имеющие возможность срабатывать при превышении - крутящим моментом номинального значения без разрушения их -элементов) .
Обрабатываемую деталь 26 устанавливают на столе 24, а копир 27 - на столе 25 и приводят в синхронное вращение. Включают источник 12 света через выпрямитель 13, электродвигатель 5, приводящий во
мическая сила Fj. подает копировальный
палец к копиру, а электродинамическая сила Fi юдает инстру.мент в зону обрабо.тки. При превышении момента резания допустимого значения прочности инстру.мента срабатывает предохранительная муфта, настроенная на этот момент, и не передает крутящий момент с вала двигателя враще
цем, но так как копировальный палец сое- динен с подвижным элементом датчика 19
ния инструмента, при этом частота вращения инструмента меньще частоты вращения двигателя. Сигнал с датчиков 9 частоты вращения поступает на блок 10 сравнения, а с блока сравнения через усилитель 11 - на блок управления электродина.мической силой F , величина которой пропорциональна асинхронности вращения инструмента и вала двигателя. При стабилизации крутяи его момента, т.е. при синхронном вращении инструмента и вала двигателя, сила F, исчезает. Таким образом происходит автоматический выбор оптимальных режимов резания. В то же время сила Fa давит на копир копировальным пальиндуктивности, то под действием силы Fj
изменяется индуктивность, что фиксируется блоком 20 управления силой F, направленной противоположно движению подачи копировального пальца, величина которой изменяется пропорционально изменению индуктивности.
роловка отслеживает поверхность копира, а жесткая связь инструментальной и копиИнструментальная и копировальная го- ловки таким образом работают отдельно друг от друга в процессе снятия припуска, но при достижении размеров детали, обратных размерам конира, упорный элемент 23 не позволяет снимать с обрабатываемой детали материал, так как копировальная
Формула изобретения Станок для копировальной обработки, содержащий установленные на основании инструментальную и копировальную головки со следяющим приводом, имеющим линейные электрические двигатели, подвижными элементами которых являются инструмент и копировальный щуп, отличающийся тем, что, с целью упрощения конструкции станка и повыщения производительности обработки, станок снабжен системой управления усилием подачи инструмента, сос
тоящей из предохранительной муфты и блока сравнения, связанного с датчиками частоты вращения инструмента и вала привода вращения инструмента, подвижные элементы инструментальной и копировальной головок связаны стержнем, жестко закрепленным на подвижном элементе инструментальной головки и с возможностью перемещения относительно копировальной головки, при этом на конце стержня установлен упорный элемент с возможностью перемещения по стержню и жесткого фиксирования на нем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок | 1985 |
|
SU1269972A1 |
| Станок для копировальной обработки | 1981 |
|
SU1389992A1 |
| Станок для копировальной обработки | 1981 |
|
SU998095A1 |
| Копировальный станок | 1981 |
|
SU997999A1 |
| Копировальный станок | 1979 |
|
SU850358A1 |
| Станок для копировальной обработки | 1985 |
|
SU1255391A2 |
| Копировальный станок | 1979 |
|
SU821078A1 |
| Переносной станок для обработки плоскостей | 1981 |
|
SU1006092A1 |
| Станок для обработки концов труб | 1982 |
|
SU1065088A1 |
| Токарный станок для торцовой тангенциальной обработки | 1985 |
|
SU1301565A1 |
Изобретение относится к станкостроению и может быть использовано при механической обработке деталей, в том числе и со сложными криволинейными поверхностями. Цель изобретения - упрощение конструкции станка и повышение производительности обработки. Станок для копировальной обработки содержит установленные на основании инструментальную и коническую головки со следящим приводом, имеющим линейные электрические двигатели, подвижные элементы которых выполнены в виде инструмента и копировального щупа. Станок снабжен системой управления усилением подачи инструмента, состоящей из предохранительной муфты и блока сравнения, связанного с датчиками частоты вращения инструмента. Подвижные элементы инструментальной и копировальной головок связаны стержнем, жестко закрепленным на подвижном элементе инструментальной ГОЛОВЙ1 и свободно - на копировальной головке. При этом на конус стержня установлен упорный элемент с возможностью перемещения по стержню и жесткого фиксирования на нем. 1 ил. JO (Л 1чЭ 00 00
24
| Станок для копировальной обработки | 1981 |
|
SU1134348A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
