Известно устройство автоматического регулирования Натяжения полосы на непрерывном стаНе холодной прокатки, включающее задатчик и измеритель натяжения, трехпозиционный релейный узел, выполненный «а операционных усилителях, связайные с двигателями «ажимных винтов, а также задатчик и измеритель перемещения нажимных винтов. Это устройство эффективно работает на рабочих скоростях прокатки.
Однако скорость прокатки на непрерывном стане периодически снижают до минимальной в конце рулона, а также .в зоне сварных стыковых щвов. На малой скорости прокатки действует «эффект скорости, существенно увеличивающий межклетевые Натяжения полосы, что приводит к значительному опусканию нажимных винтов, увеличивающемуся за счет уменьщения передаточного коэффициента стана «нажимные -винты - натяжение. Во время последующего быстрого разгова стана «эффект скорости и рост передаточ;ного коэффициента стана приводят практически к скачкообразному падению натежения до того, как нажимные винты вернутся в исходное положение, в котором они были до замедления стана. Для исключения потерь натяжения и, следовательно, нарущения устойчивости полосы с тяжелыми для стана последствиями опускание нажимных винтов ограничивают. Допустимых пределов
опускания нажимных винтов обычно недостаточно для поддержания натяжения при глубоком снижении скорости прокатки.
Целью предлагаемого изобретения является предотвращение обрыва полосы при разгоне стана.
Это достигается тем, что в него введены тахогенератор, связанный с прокатными валками, и нелинейный преобразаватель, которые
подключены ко входу задатчика перемещения нажимных винтов.
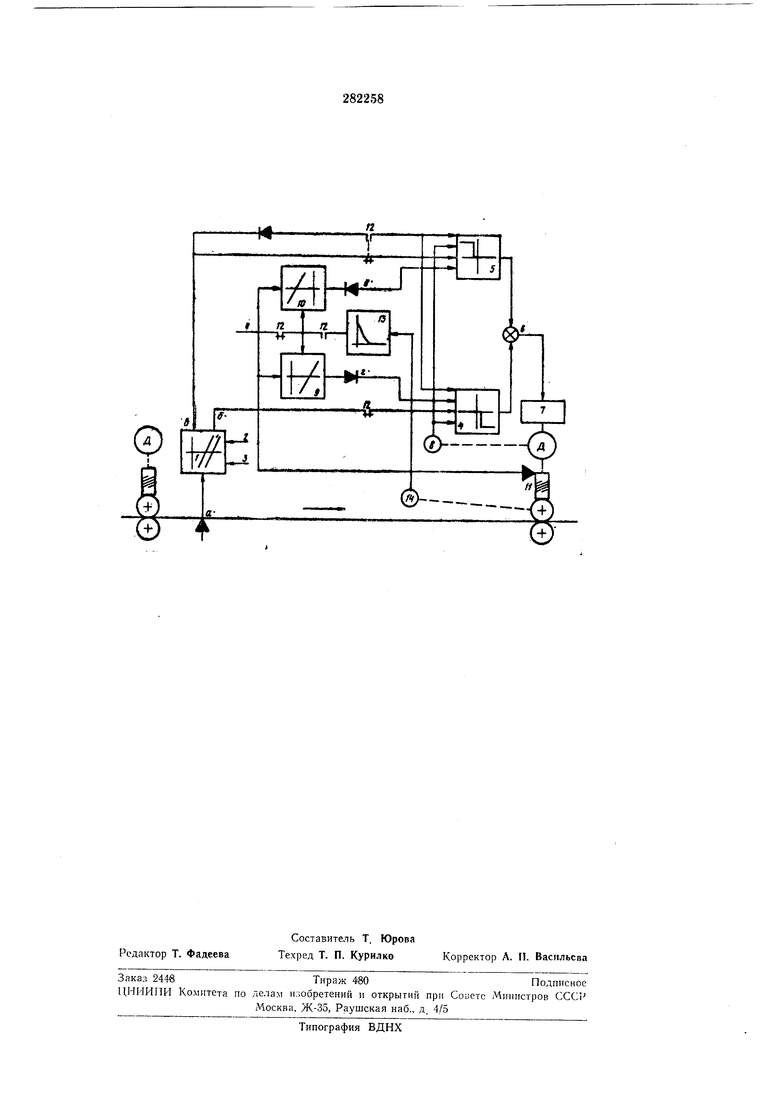
Па чертеже изображена структурная схема предлагаемого устройства.
Сигнал а измерителя натяжения в задатчике натяжения / сравнивается с уставками натяжения 2 и зоной нечувствительности 5. Сигнал б отклонения натяжения верхнего предела зоны нечувствительности подается па вход двухпозиционного релейного усилителя 4, а
сигнал в отклонения натяжения от нижнего предела зоны нечувствительности - на вход аналогичного релейного усилителя 5, имеющего полярность сигнала на выходе, обратную полярности усилителя 4. Суммарный сигнал 6
усилителей 4 н 5 подается на вход системы 7 управления нажимными винтами последующей клети.
ных винтов за пределы, задаваемые в задатчиках 9 и 10 перемещеиия относительно исходного положения. Сигнал перемещен1ия нажтгмных вгьнтов относительно исходного положен я для задатчиков 9 н 10 берется с измерителя перемещения //.
Сигнал е, -с которого в заха.атчиках 9 и 10 устзйавливаются пределы перемещевия, подается в эти задатчики через нормально закрытый коитакт реле 12. Через нормально открытый контакт реле 12 и через нелинейный преобразователь 13 в задатчики 9 и 10 вместо сигнала е подается сигнал тахогенератора 14 прокатных валков клетей.
С помощью реле 12 сигналы б и в отклонения натяжения можно отключать от входа усилителей 4 « 5, «о одновременно это реле подключает отрицательную полярность (условло показа-й диод) сигнала в отклонения «атяжения ко входу усилителей 4 и 5. Отклонение натяжения полосы за верхний предел зоны яечувствительяостя приводит к срабатыванию усилителя 4, а отклонение натялсения за нижний предел- усилителя 5. В пределах зоны нечувствительности задатчика натяжения / оба усилителя находятся в нулевом, отключенном, состоянии. Срабатывание усилителя 4 приводит к перемещению нажимных винтов «вниз, а усилителя 5-«вверх.
Сигнал тахогенератора 8 и 11 нажимных винтов, расширяет зону нечувствительности навстречу соответствующему отклонению натяжения на величину выбега лажимных винтов для стабилизации процесса регулирования. Перемещение нажимных винтов за заданные в задатчиках 9 и 11 пределы приводит к срабатыванию второго усилителя. Например, от сигнала отклонения натяжения за верхний предел зоны нечувствительности срабатывает усилитель 4, и винты, перемещаясь «вниз, достигают предела, заданного в задатчике. W., Под действием сигнала д ухода винтов за эти пределы срабатывает усилитель 5. Оба усилителя оказываются в сработанном состоянии, и их суммарное действие на нажимные винты равно нулю. Дальнейщее перемещение нажимных винтов «вниз становится невозможным. Они могут перемещаться лищь «вверх от сигнала в отклонения натяжения за нижний иредел зоны нечувствительности.
При глубоком замедлен-ии стана нажим/пле винты вследствие «эффекта скорости обычно перемещаются «вниз и вследствие уменынения передаточного коэффициента стана, как правило, доходит до нижнего предела.
С начало.м ускорения стана реле отключает вход усилителей 4 и 5 по отклонению натяжения и переключает напряжение задания пределов задатчиков 9 и 10 на нелинейный преобразователь 18.
В первый момент сигнал е и выход .нелинейного преобразователя 13 близки (полное ра5 венство имеет место при скорости стана, равной нулю).
С ростом скорости напряжение нелинейного преобразователя. 13 и, следовательно, уставка пределов уменьщаются, достигая .нуля при
0 определенной скорости прокатки (8-10ж/се/с). Уменьщение предела приводит к перемещению нажимных винтов в исходное положение, которое они занимают после достижения станом Скорости вьпле 8-10 м/сек. Затем реле 12 отключается, и регулятор переводится на работу от сигналов отклонения.натяжения.
В режиме следования нажимных винтов в 1 сходиое положение сохраняется связь усилителей с сигналом 8 в задатчика натяжения, ко0 тора я вступает в действие при падепии натяжения ниже нижнего предела зоны нечувствительности, прекращая перемещение нажимных винтов «вверх в исходное положение или даже создавая встречное перемещение нажимных
.5 винтов «вверх, для предотвращения потери натяжения в период разгона стана.
Эффективность предлагаемого регулятора заключается в то, что сокращается вероятность потери натяжения и обрыва иолосы при
0 разгоне стана на переднем конце и в зоне стыковых сварных швов в рулоне для пропуска которых стан обычно замедляют. Достигается это тем, что регулятор при разгоне стана перемещает нажимные винты ло определенной про5 грамме в функции скорости прокатки и одновременно контролирует и предотвращает возможные провалы натяжения. Перемещение в функции скорости прокатки необходимо .не. только для того, чтобы задать определенный
0 закон возврата в исходное положение, но и для того, чтобы это перемепдеиие ирекращ.::лось после разгопа стана.
П р е д м с т изобретен и я
Устройство для автоматического регулирования натяжения полосы на непрерывном стане холодгюй прокатки, включающее задатчик и
измеритель натяжения, трехпозициониый релейпый узел, выполненный на операционных усилителях, связанные с двигателями нажимных винтов, отличающееся тем, что, с целью предотвращения обрыва по.лосы при разгоне
стана, в него введен тахогенератор, связанный с прокатными валками, и нелинейный преобразователь, которые подключены ко входу задатчика пере.мещения нажи.мных винтов. :
@,

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ ТОЛЩИНЫполосы | 1971 |
|
SU304007A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1970 |
|
SU272249A1 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПОЛОСЫ МЕЖДУ КЛЕТЯМИ НЕПРЕРЫВНОГО СТАНА ХОЛОДНОЙПРОКАТКИ | 1972 |
|
SU344909A1 |
| Устройство для регулирования натяжения полосы между клетями непрерывного прокатного стана | 1983 |
|
SU1117099A1 |
| Устройство автоматического регулирования толщины прокатываемой полосы | 1990 |
|
SU1731321A1 |
| Устройство для регулирования межклетевых натяжений в непрерывном стане холодной прокатки | 1977 |
|
SU686795A1 |
| Устройство для регулирования натяжения полосы на непрерывном прокатном стане | 1980 |
|
SU942841A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯПОЛОСЫ | 1968 |
|
SU212206A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1970 |
|
SU269892A1 |
| Устройство регулирования натяжения полосы | 1981 |
|
SU939150A1 |