со ;о
Од
t
Изобретение относится к устройствам для сборки шариковых ручек.
Известно устройство для сборки шариковых ручек, состоящее из закрепленных на станине привода, вибрационных махазинов, вибробункёров, механизма фиксации пишущего узла ручки, механизма фиксации и прижима наконечника, механизма фиксации и прижима корпуса ручки, направляющих, установленной на направляющих каретки и механизма перемещения каретки 1 .
Недостатками известного устройства являются невысокая точность сборки и ограниченные технологические возможности, исключающие сборку ручек с пишущими узлами :различной длины.
: Цель изобретения - повьииение точностисборки и расширение технологических возможностей автомата.
Поставленная цель достигается тем, что в автомате для сборки шариковых ручек, состоящим из закрепленных на станине привода, вибрационньпс магазинов, вибробункеров, механизма фиксации пишущего узла ручки, механизма фиксации и прижима наконечника, механизма фиксации и прижима корпуса ручки, направляющих установленной на направляющих каретки и механизма перемещения каретки, механизм фиксации пищущего узла выполнен в виде М-образных подпружиненных ловителей, а механизм фиксации и прижима наконечника и механиз фиксации и прижима корпуса ручек выполнены каждьш в виде одноступенчтых губок, неподвижная из которых закреплена на станине, а подвижная на каретке, при этом механизм фиксации и прижима наконечника снабжен раздвижными центрирующими направляюш;ими, установленными с двух сторон неподвижной губки.
Узел перемещения каретки вьшолнен в виде кулачково-рычажного механизма.
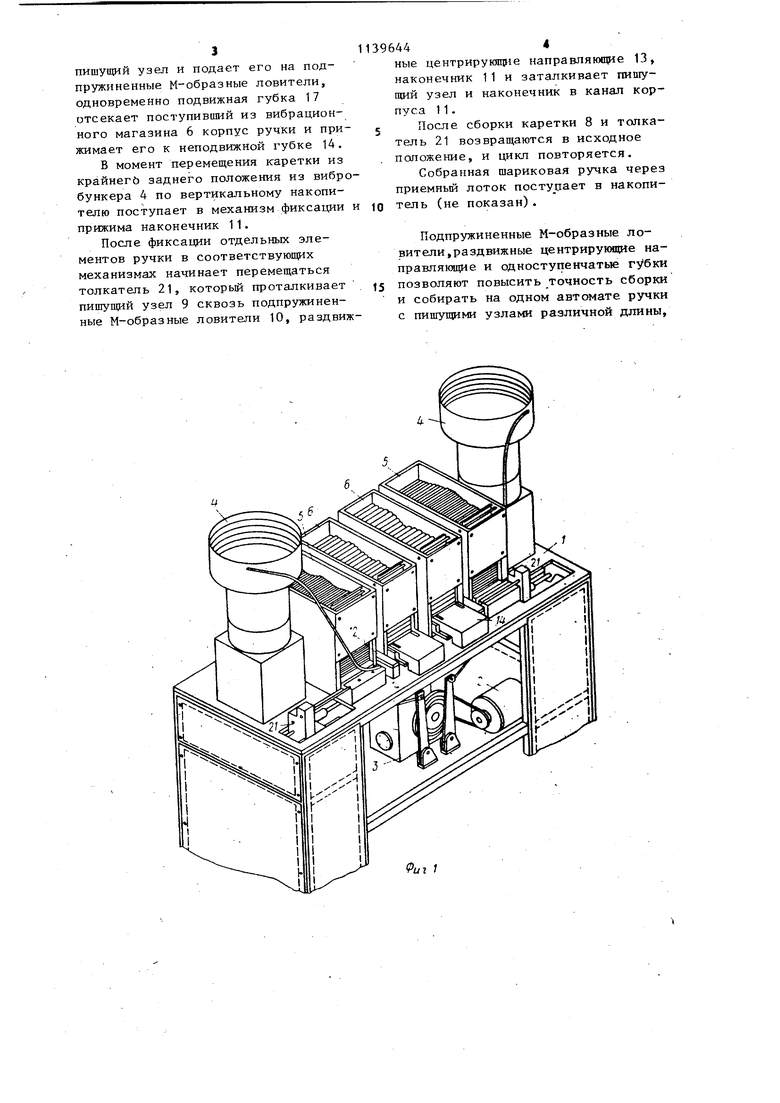
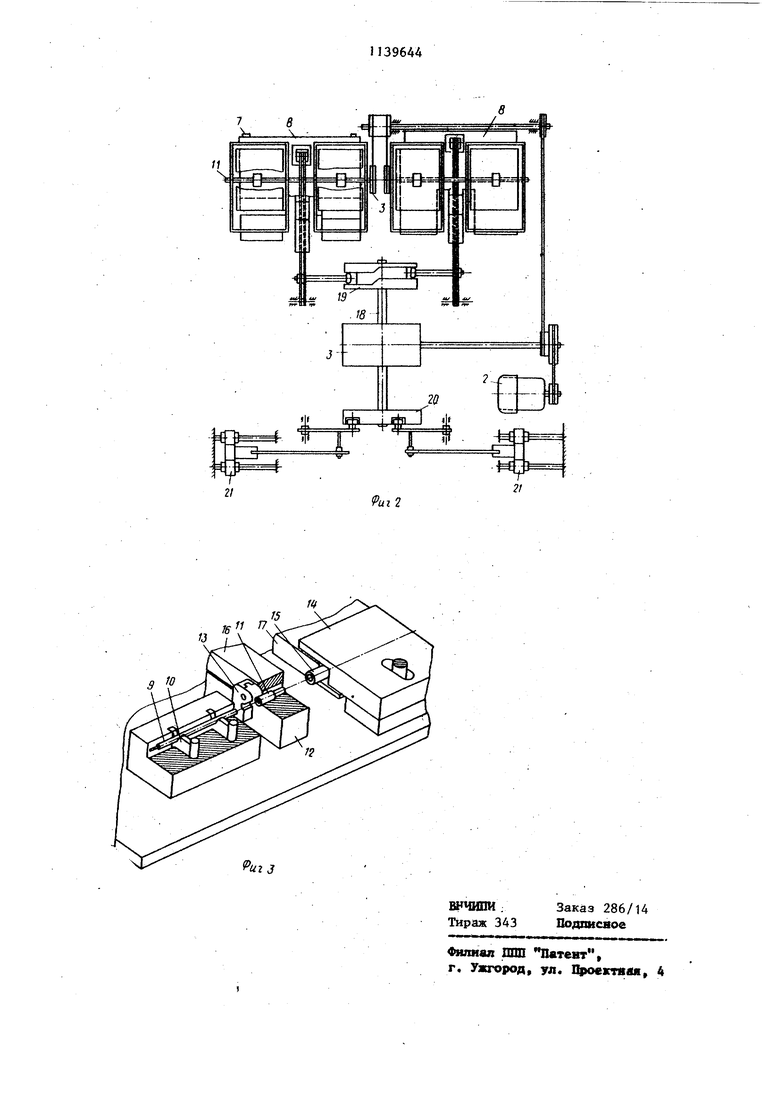
На фиг. 1 представлен автомат дл сборки шариковых ручек, общий вид; на фиг. 2- кинематическая схема автомата; на фиг. 3 - положение деталей шариковой ручки пер.ед сборкой.
Автомат состоит из станины 1, закрепленных на станине привода, содержащего электродвигатель 2 и ре96442
дуктор 3, связанные между собой клиноременной передачей, двух вибробункеров 4 с вертикальными накопителями для наконечников ручек, двух 5 бибрационных магазинов 5 для пишу1Щ1Х узлов ручек, двух вибрационных магазинов 6 для корпусов ручек, направляющих 7, на которых установлена с возможностью поперечного перемещения
10 каретка 8, механизма фиксации пишущего узла 9, содержащего М-образные подпружиненные ловители 10, механизма фиксации и прижима наконечника 11, содержащего неподвижную губку
5 12 с раздвижными центрирующими направляющими 13, неподвижной губки 14 механизма фиксации и прижима корпуса ручки 15. Подвижная губка 16 механизма фиксации и прижима наконечника и подвижная губка 17 механизма фиксации и прижима корпуса ручки установлены на каретк:е 8. На выходном валу 18 редуктора 3 смонтированы кулачки 19 и 20. Кулачок 19 с
5 помощью рычажной системы связан с кареткой 8, а кулачок - с толкателем 21, смонтированным с возможностью продольного перемещения.
Днища вибрационных магазинов
0 шарнирно связаны с валами, которые получают вращение от привода. На выходе вибрационных магазинов установлены подпружиненные ограничители , (не показаны), обеспечивающие выход только одной детали.
Автомат работает следующим образом.
В вибробункеры насыпают наконечники 11, в вибрационные магазины
5 укладывают предварительно ориентированные пишущие узлы ручек, а в вибрационные магазины 6 - корпуса. Включают привод автомата. От электродвигателя 2 через редуктор 3,
, кулачок ч рычажную систему получает возвратно-поступательное движение каретка 8,.несущая подвижную губку 16 механизма фиксации и прижима наконечника и подвижную губку 17 механизма фиксации и прижима корпуса ручки, а через кулачок 20 и соответствующую рычажную систему получает возвратно-поступательное движение толкатель 21.
При перемещении каретки 8 из крайнего заднего положения вперед подвижная губка 16 отсекает поступивший из вибрационного магазина 5 пишущий узел и подает его на подпружиненные М-образные ловители, одновременно подвижная губка 17 отсекает поступивший из вибрационного магазина 6 корпус ручки и при жимает его к неподвижной губке 14. В момент перемещения каретки из кра.йнегй заднего положения из вибр бункера 4 по вертикальному накопителю поступает в механизм фиксации прижима наконечник 11. После фиксации отдельных элементов ручки в соответствующих механизмах начинает перемещаться толкатель 21, который проталкивает пишущий узел 9 сквозь подпружиненные М-образные ловители 10, раздвиж 444 ные центрирующие направлякицие 13, наконечник 11 и заталкивает пишущий узел и наконечник в канал корпуса 11. После сборки каретки 8 и толкатель 21 возвращаются в исходное положение, и цикл повторяется. Собранная щариковая ручка через приемный лоток поступает в накопитель (не показан). Подпружиненные М-образные ловители, раздвижные центрирующие направляющие и одноступенчатые губки позволяют повысить точность сборки и собирать на одном автомате ручки с пишущими узлами различной длины.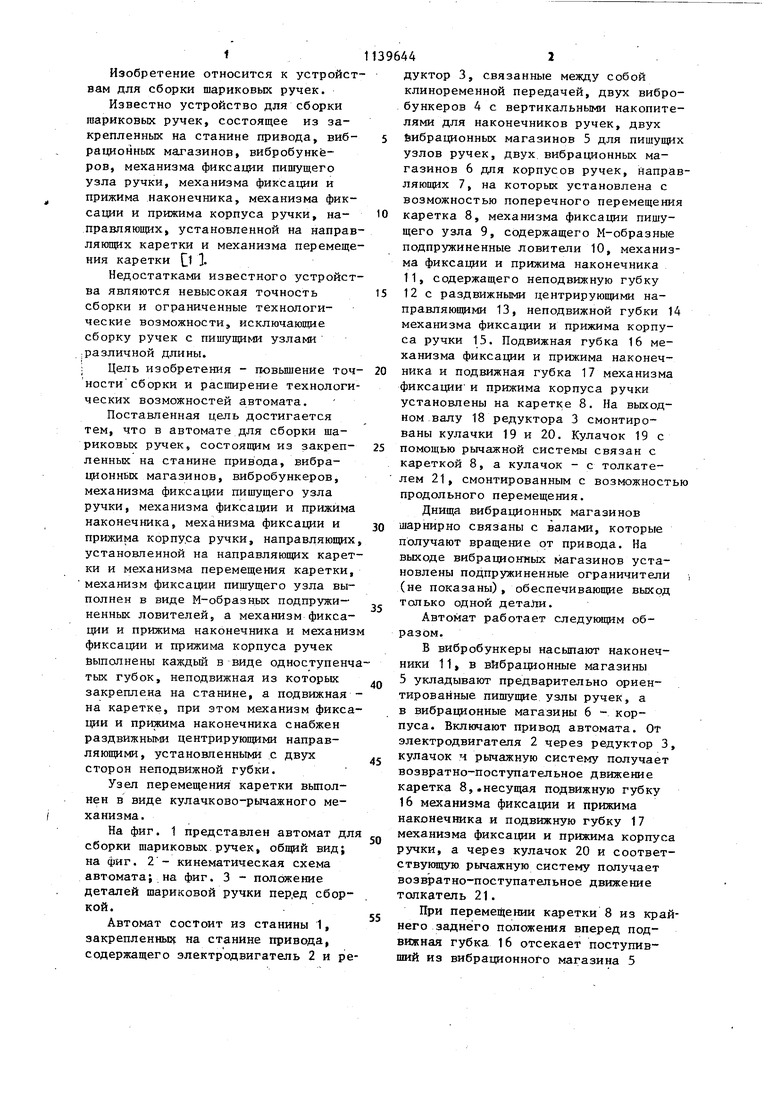
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сборки шариковых ручек | 1980 |
|
SU903222A1 |
| УСТРОЙСТВО для СБОРКИ ШАРИКОВЫХ РУЧЕК | 1970 |
|
SU283857A1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ СБОРКИ РАДИОДЕТАЛЕЙ С ОСЕВЫМИ ПРОВОЛОЧНЫМИ ВЫВОДАМИ | 1965 |
|
SU216081A1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ СБОРКИ УШКА НАРУЧНЫХ ЧАСОВ | 1971 |
|
SU305451A1 |
| Устройство для изготовления ремней | 1990 |
|
SU1715708A1 |
| Автомат для сборки шариковых авторучек | 1978 |
|
SU766901A1 |
| Автомат для сборки мебельных ящиков | 1986 |
|
SU1315309A1 |
| Станок для обработки деревянных заготовок | 1983 |
|
SU1155445A1 |
| Автомат для сборки крестовин карданного вала автомобиля | 1980 |
|
SU904966A2 |
1. АВТОМАТ ДЛЯ СБОРКИ ШАРИКОВЫХ РУЧЕК, состоящий из закрегшенньк на станине привода, вибрационных магазинов, вибробункеров, механизма фиксации пишущего узла ручки, механизма фиксации и прижима наконечника, механизма фиксации и прижима корпуса ручки, направляющих, установленной на направляющих каретки и механизма перемещения каретки, отличающийся тем, что, с целью повышения точности сборки и расширения технологических возможностей автомата, механизм фиксации пишущего узла выполнен в виде М-образных подпружиненных ловителей, а механизм фиксации и прижима наконечника и механизм фиксации и прижима корпуса ручек вьшолнены каждый в виде одноступенчатых убок, неподвижная из которых закреплена на станине, а подвижная - на каретке, при этом механи.зм фиксации и прижима наконечника снабжен раздвижными центрируюпщми направпяющими, установленными с двух сторон неподвижной губки.S 2. Автомат поп.1, отличаю(Л щийся тем, что узел перемещения каретки выполнен 6 виде кулачково-рычажного механизма.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автомат для сборки шариковых ручек | 1980 |
|
SU903222A1 |
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
