Изобретение относится к области фотограмметрического приборостроения.
Известные стереофотограмметрические приборы для обработки аэроснимков, например стереографы СД-3, не удобны в эксплуатации, так как являются стационарными, требуют специальной установки и не позволяют производить управление каретками модели одной рукой.
В предлагаемом стеоеосЬотограмметрическом приборе для управления движениями кареток модели одной РУКОЙ с кареткой У модели жестко связана рейка, расположенная параллельно оси Y. свободный конец КОТОРОЙ связан с первой шестерней, ось которой укреплена на основании, а вторая шестерня связана с рейкой, несущей оправу подшипников, враш.ающейся вокруг оси, параллельной оси F, трубки с прорезью вдоль образующей, в которой входит направляющая ш понка стержня с рукояткой на одном конце и шестерней на другом.
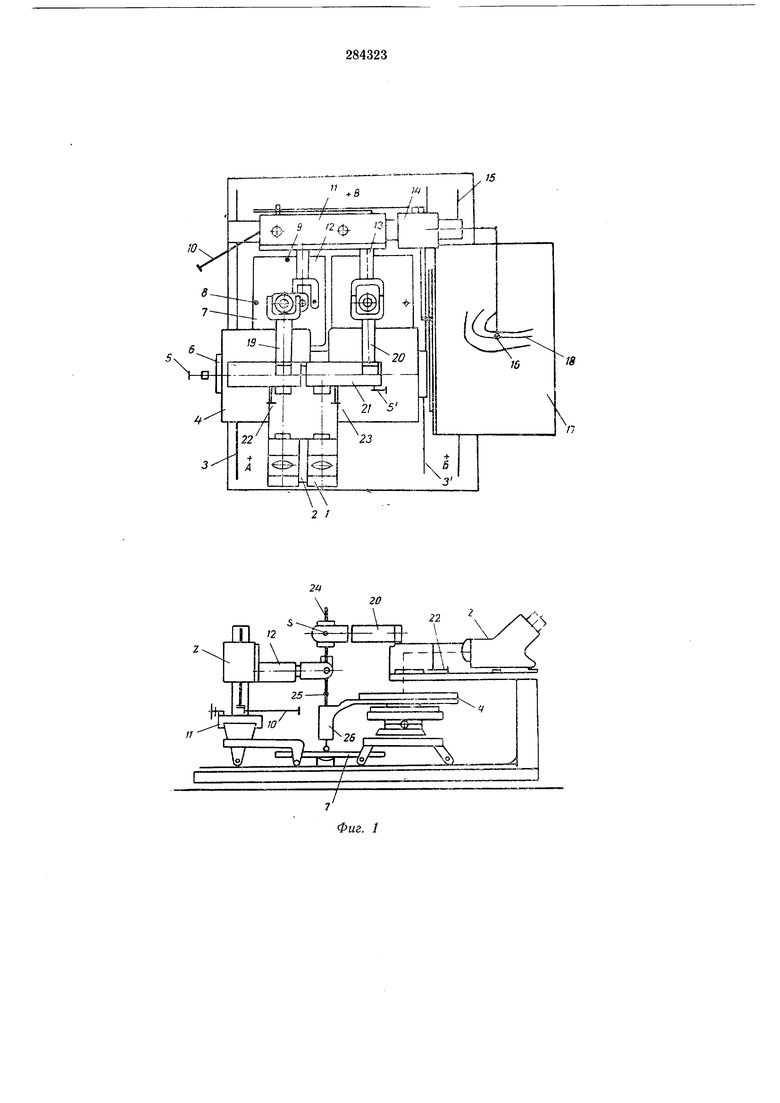
Кроме того, с целью перемещения каретки X модели, стержень, вращаюшийся с помощью рукоятки вокруг оси, параллельной оси F, заключен в оправку, скрепленную с кареткой У модели, а его щестерня с помощью идентичной шестерни, закрепленной на той же оправе, связана с рейкой, укрепленной шарнирно на каретке X модели и расположенной вдоль направления, параллельного оси X. При этом стерл ень соединен с оправкой карданом для ускоренного перемещения кареток модели. На фиг. 1 показан описываемый прибор в
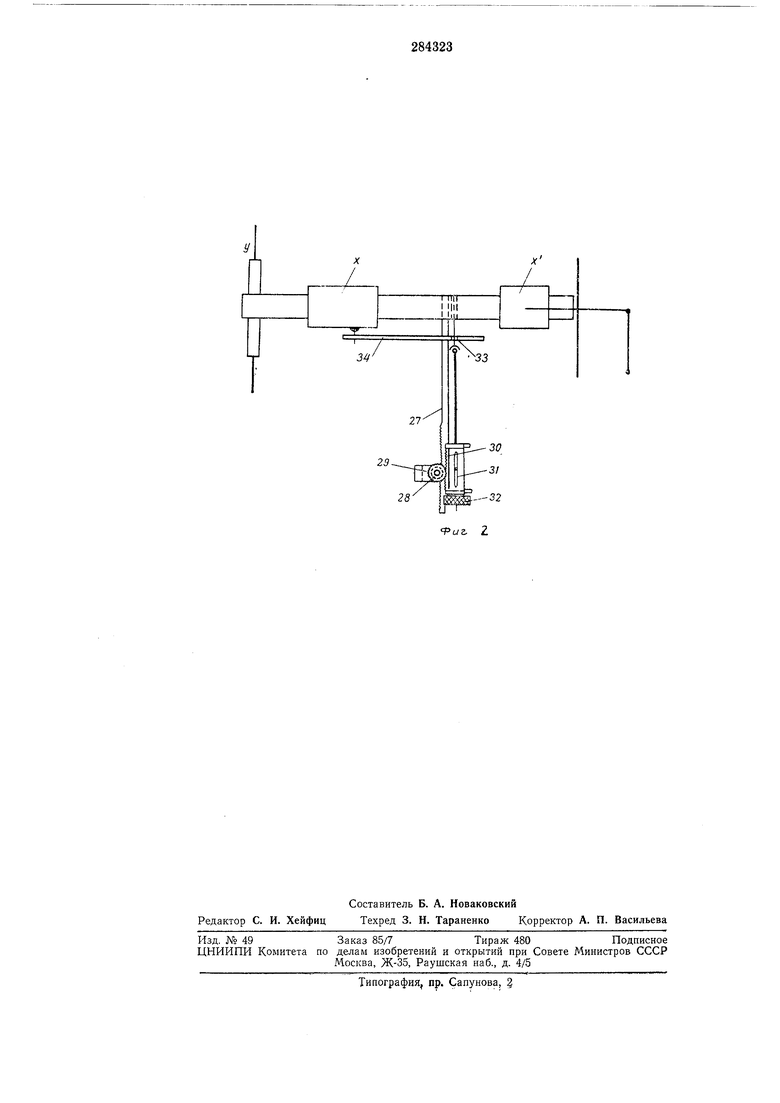
двух проекциях; на фиг. 2 - схема ручного травления перемещения кареток X и Y прибора.
На плато 1, которое расположено на трех подъемных винтах А, Б и В, размешена неподвижная бинокулярная система 2 длг стереоскопического рассматривания фронтально расположенных аэроснимков, а также направляющие 5 и 5 движения Y. Левый аэроснимок 4 расположен под объективом левой ветви
наблюдательной системы. Аналогично расположен и правый аэроснимок. Имеются микрометры 5 и 5 децентраций AJi f;i,tgai и &.Ха . Каретка 6-Х левого и правого аэроснимков перемещается в направлении У по направляющим 3 и 5. Па плато / расположена левая коррекционная плоскость 7 (аналогично расположена правая коррекционная плоскость), устанавливаемая с помощью винтов 5 и 9 на углы Kui и /ccoi. Посредством привода 10
перемещается каретка Z базисного устройства //, несущего карданы 12 н 13 с муфтами. Движения X и У прибора посредством каретки М-Х и рельсы 15-У механического координатографа передаются на карандащ 16, вычернеобходимые контура. Через карданы 19 и 20 левого и нравого центров проекций проходят проектирующие рычагн к Карданам 12 и 13. 21 - оптическая коробка бинокуляра. Децентрации AYi f tgo), и Ay2 f/jtgco2 вводятся с помощью микрометров децентраций 22 и 23. Прецизионный стержень 24 (см. фиг. 2) проходит через муфту кардана до шарового сочленения 25 суппорта 26 изменений фокусного расстояния.
К каретке Y прибора прикреплена рейка 27, которая сцеплена с малой шестерней 28 блока шестерен 28-29, причем шестерня 29 в 2-2,5 раза больше по диаметру, чем шестерня 8. Шестерня 29 вращается малой рейкой 30, расположенной на подшипниках трубки 31 со шлицевым отверстием, в которое входит шпонка длинного стержня с рукояткой 32 на одном конце и с малой шестерней 33 на другом. Стержень может вращаться во втулке, присоединенной как и рейка 27 к каретке 4. На малую шестерню 33 опирается своим весом зубчатая рейка 34, укрепленная поворотно к каретке X прибора.
В приборе использован известный координатограф, основанный на применении цилиндрических зубчатых колес качания и реечных зацеплений. Каретка 11-Х модели и 14-Х координатографа расноложены на одной направляющей. Каретки X и X соединены парой реек через редуктор пары шестерен, находящийся на каретке X, что при подборе шестерен дает преобразованное по масштабу перемещение карандашу 16. Планшет 17 координатографа имеет перемещение вдоль оси У от редуктора пары шестерен, находящихся на каретке У модели. Реечные зацепления с шестернями редуктора неподвижной и подвижной рейки планшета обеспечивают последнему преобразованное по масштабу движение У.
Прибор работает следующим образом.
Устанавливают: наклон коррекционных плоскостей на углы ка-L, ксоь ка, , линейный компонент bjf сближения карданов 12 и 13 и превышение одного из них - углы jti и KZ снимков. Засечка точек происходит на значении Я (высота в масщтабе модели), меньшем фокусного расстояния. F прибора. Для создания и обработки модели оператор использует движения X, У, Z; из них высотное Z совершается приводом 10, а плановое ysT и У - следующим образом (фиг. 3).
Каретку У оператор перемещает рукой, толкая трубку с рукояткой 32 через щестерни
29-28 рейки 27, а каретку X - поворачивая рукоятку 32 той же рукой и вращая через стержень щестерню 33. Поскольку диаметр рукоятки 32 больще в 2-2,5 раза диаметра
щестерни 33, перемещение каретки X происходит достаточно плавно. Для больших перемещений каретки У устройство (32-31-30) отводится вправо и устанавливается в исходное положение. Затем оно снова соединяется с
щестерней 29, и работа по перемещению кареток продолжается.
Получаемый на приборе масщтаб модели равен 0,8-1,0 по отнощению к аэроснимку. Для увеличения масштаба в приборе применен механический реечный координатограф.
Предмет и з о б ip е т е н и я
1.Стереофотограмметрический прибор для обработки аэроснимков, содержащий основание, каретки Х и У модели, перемещающиеся по направляющим, параллельным основным координатным осям и У прибора, каретки аэроснимков, перемещающиеся проектирующими рычагами, визирную бинокулярную оптическую систему, базисное устройство и механический координатограф, состоящей из карандащного устройства, планщета, зубчатых цилиндрических колес качения и реечных зацеплений, отличающийся тем, что, с целью управления движениями кареток модели одной рукой, с кареткой У модели жестко связана рейка, расположенная параллельно оси У, свободный конец которой связан с первой щестерней, ось которой укреплена на основании, а вторая шестерня - связана с рейкой, несущей оправу подщинников, вращающейся вокруг оси, параллельной оси У, трубки с прорезью вдоль образующей, в которую входит направляющая шпонка стержня с рукояткой на одном конце и щестерней на другом.
2.Прибор по п. 1, отличающийся тем, что, с целью перемещения каретки X модели, стержень, вращающийся с помощью рукоятки вокруг оси, параллельной оси У, заключен в оправу, скрепленную с кареткой У модели, а его щестерня с помощью идентичной шестерни, закрепленной на той же оправе, связана с рейкой, укрепленной шарнирно на каретке X модели и расположенной вдоль направления, параллельного оси X.
3.Прибор по пп. 1 и 2, отличающийся тем, что, с целью ускоренного перемещения кареток модели, стерл ень соединен с оправой карданом.
/5

| название | год | авторы | номер документа |
|---|---|---|---|
| Стереофотограмметрический прибор | 1979 |
|
SU808844A1 |
| Топографический проектор | 1960 |
|
SU135238A1 |
| СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР ПЛОСКОГО ТИПА ДЛЯ ОБРАБОТКИ АЭРОСНИМКОВ И СНИМКОВ НАЗЕМНОЙ | 1966 |
|
SU188044A1 |
| Стереограф | 1978 |
|
SU717553A1 |
| Стереофотограмметрический прибор | 1979 |
|
SU808843A1 |
| Ортофототрансформатор | 1977 |
|
SU714148A1 |
| Способ оценки погрешностей юстировки карданов универсальных стереоприборов | 1977 |
|
SU647526A1 |
| ПРИБОР ДЛЯ ОБРАБОТКИ СТЕРЕОПАР | 1968 |
|
SU221327A1 |
| УНИВЕРСАЛЬНЫЙ | 1971 |
|
SU315922A1 |
| Стереофотограмметрический прибор | 1959 |
|
SU124641A1 |
W FFl
Фиг. 1
