Изобретение относится к области авиационных тре:наже|ров, а именно « автОМатнчесюнм устройствам для .моделирования самолетны.х систем управления на нилотаж-ных стендах.
Известны самолетиые стенды-тренажеры, в которых имитация условий полета и внешних воз:мущений осуществляется € помощью электронной iвычиcлитeльiнoй машины (электронной модели), через соответствующие электроприводы воздействующей на иополнительные органы самолетных систем управления.
Недостатком указанных стендов является то, что с их по.мощью нельзя моделировать динамику систем управления тяжелых самолетов, имеющих большую протяженность и малую жесткость «есиловой проводки управле)1ия.
Целью изобретения я-вляется устранение этого недостатка благодаря введению в систему проводки регулируемого эле мента, КОторый может управляться по програМме, заложенной в элект1ронщой модели в зависимости от положения органов унравления и режима Полета.
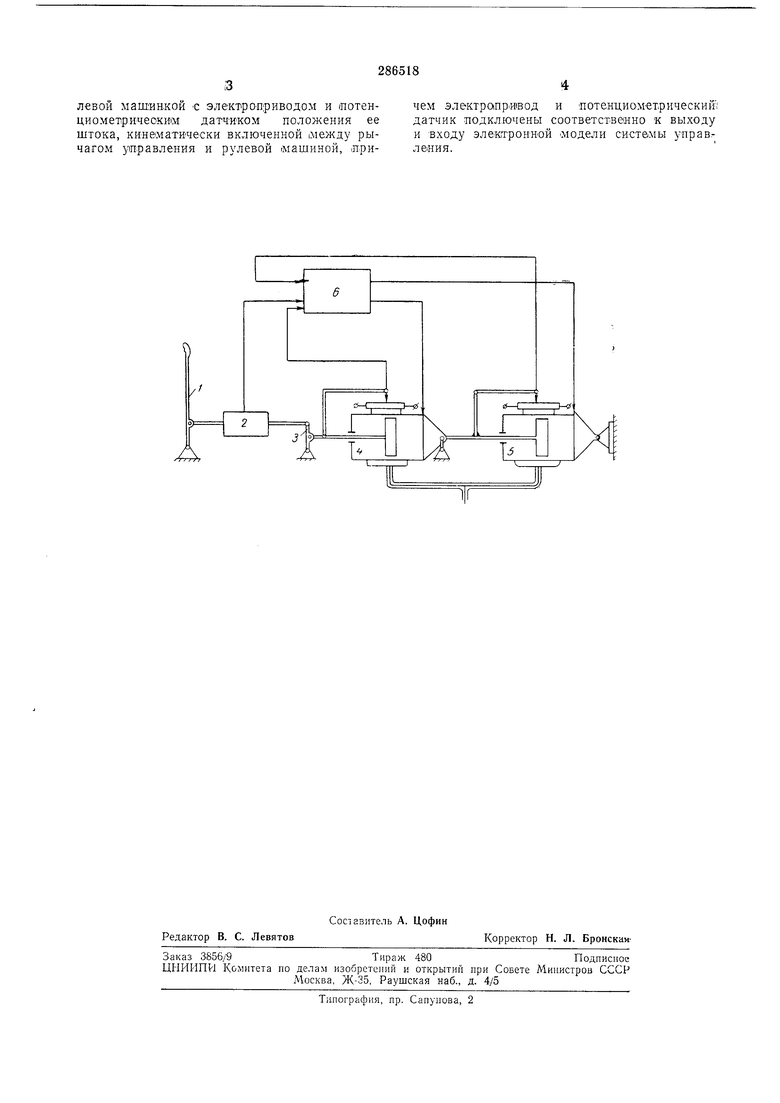
Схема П1редлагае гОГО устройства .приведена на чертеже.
рои присоединен к щтоку рулевой машины о, Ko.pTiyc машины 5, в свою очередь, укреплен на основании стенда. Выходы датчика усилиГ и потенциометрических датчиков положения щтоков дополнительной рулевой мащинкн и рулевой Л1ан1и«ы подсоединены ко входам электронной модели 6, один выход KOTOpoii подключе н к электроприводу дополнительно рулевой машинкн, а другой - к электропр,воду рулевой машины.
В электронной модели -по сиг;1ал с датчика усилия вырабатывается сигнал воздействия на дополнительную рулевую машинку и рулевую |машинку, потенциометрические датчики положения щтоков которых образуют цеди обратной связи соответствующих следящих систем, оказывающих воздействие на обе рулевые машины, входящие в комплект электровной .модели.
Предмет изобретения
Устройство для загрузки рычагов управления -пилотажных стендов, содержащее рычаг управления, кинематически связанный проводкой с рулевой ман1иной, и электронную модель системы управления, отличающееся тем, что, с целью имитации динамических характеристик .проводки при различных режимах полета, оно снабжено дополнительной рулевой машиЕКОй с электроприводом и потенциометричеоким датчиком положения ее штока, кинематически включенной (Между рычагом травления и рулевой гмашиной, .причем электропривод и потенциометрическии; датчик подключены соответствемно к выходу и входу электронной модели системы управлеиия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ УЧЕБНО-ТРЕНИРОВОЧНОГО САМОЛЕТА | 1993 |
|
RU2093419C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2004 |
|
RU2282562C1 |
| Устройство демпфирования продольных колебаний экраноплана по углу тангажа | 2015 |
|
RU2634660C2 |
| СИСТЕМА ЗАГРУЗКИ РЫЧАГОВ УПРАВЛЕНИЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 2005 |
|
RU2298836C2 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ НЕВЕСОМОСТИ, БЛИЗКОЙ К АБСОЛЮТНОЙ, НА САМОЛЕТЕ-ЛАБОРАТОРИИ | 1967 |
|
SU199694A1 |
| Моделирующий комплекс для отладки системы управления автономным подвижным объектом | 2017 |
|
RU2662331C1 |
| Устройство для имитации нагрузки приводов раскрытия трансформируемых конструкций космических аппаратов | 2023 |
|
RU2801954C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ | 1971 |
|
SU305488A1 |
| ПИЛОТАЖНЫЙ СТЕНД МАНЕВРЕННОГО САМОЛЕТА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ОГРАНИЧИТЕЛЕМ ПРЕДЕЛЬНЫХ РЕЖИМОВ | 2020 |
|
RU2753025C1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ АЭРОДИНАМИЧЕСКИХ | 1973 |
|
SU405116A1 |
Л
