Изобретение относится к машинам непрерывного транспорта и касается цепного конвейера.
Известны цепные конвейеры, включающие гибкий замкнутый тяговый орган с шарнирно смоитироваииымп иа нем стержнями, каждый из когоры.х оборудован подвижным вдоль желоба захватом и контактирует с копирными направляюащми посредством опорных роликов. Однако такие конвейеры не обеспечивают бесперебойной работы конвейера при наличии нескольких мест выгрузки.
Целью настоящего изобретения является обеспечение бесперебойной работы конвейера.
Это достигается тем, что каждый стержень оборудован роликом, контактирующим с впереди расположенным грузом.
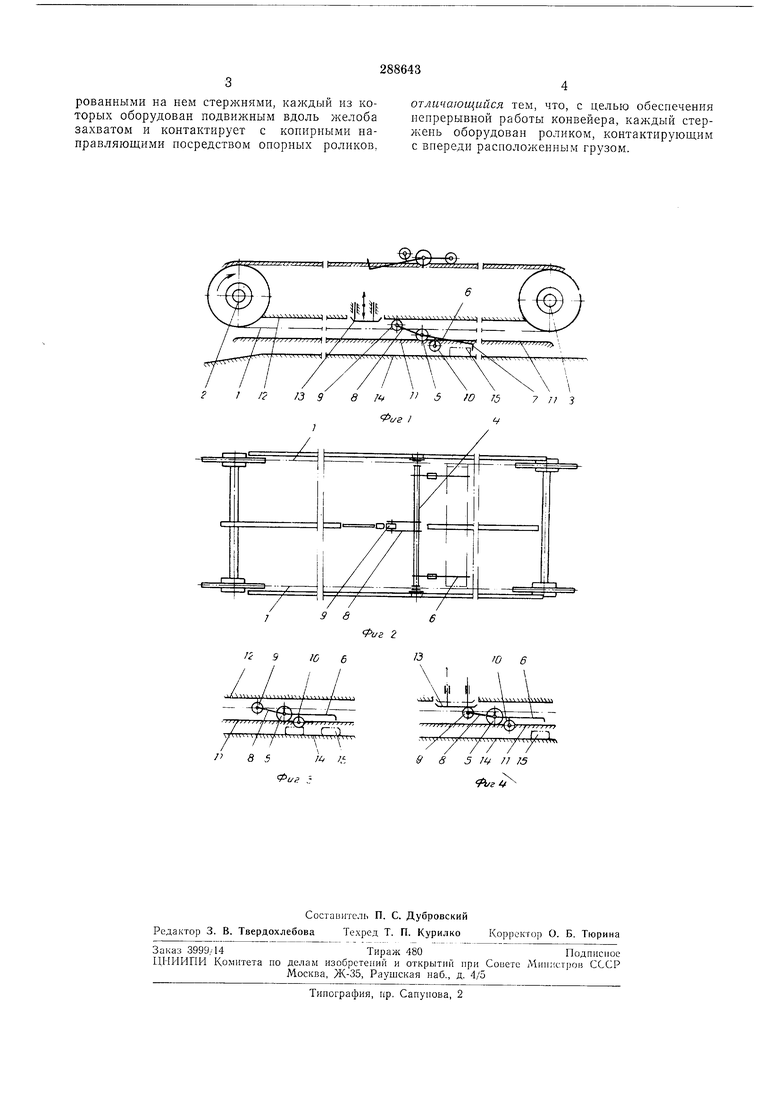
На фиг. 1 изображен предлагаемый конвейер, общий вид; на фиг. 2 - то же, вид сверху; иа фиг. 3 - рабочий орган конвейера при накоплении груза; на фиг, 4 - то же, в момент воздействия на него конирной нанравляющей.
Конвейер состоит из двух параллельных замкнутых тяговых цепей 1, которые охватывают приводные 2 и натяжные 3 звездочки. Тяговые цепи 1 связаны одна с другой осями 4 с ходовыми роликами 5 и шариирно смонтированными на оси стержнями 6, каждый из которых оборудован на копне захватом 7. На
оси 4 иа верхнем стержне 8 смонтирован оиорный ролик 9, а Е средней части стержня 6 укреплен дополнптельный ролик 0. Ходовые ролики 5 контактнруют с направляюпщми //, а опорные ролики 9 - с щиной 12 и конирной направляющей 13, которая выполнена подвил ной в вертикальной плоскости. Захват 7 взаимодействует с подвижно расположенным в желобе 14 грузом 15.
В случае необходимости накопления груза 15 в желобе 14 опускают коипрную направляющую 13. Когда опорный ролпк 9 подходит к направляющей 13, on опускается, и стержень 6 с захватом 7 подннмается. оставляя груз /5.
При нодходе к этому месту следующего захвата 7 дополнптельный ролик 10 взаимодействует с впередн расположенным грузом и поднимает захват 7. В дальнейщем эти операции повторяются с калчдым последующим грузом. Прп необходимости дальнейщей транспортпровкн груза конирную направляющую ноднимают, н захват захватывает первый груз, В дальнейшем дополнптельный ролик 10 соскакивает с расположенного первым
в этот момент груза, и он захватывается захватом 7.
рованными на нем стержнями, каждый из которых оборудован подвижным вдоль желоба захватом и контактирует с копирными направляющими посредством опорных роликов,
отличающийся тем, что, с целью обеспечения непрерывной работы конвейера, каждый стержень оборудован роликом, контактируюш,им с впереди расположенным грузом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Накопительный конвейер | 1978 |
|
SU749747A1 |
| ШАГОВЫЙ КОНВЕЙЕР | 1971 |
|
SU430014A1 |
| ЛЮЛЕЧНЫЙ КОНВЕЙЕР | 1971 |
|
SU298514A1 |
| КАНТОВАТЕЛЬ ДЛЯ ПОВОРОТА И УКЛАДКИ ШТУЧНЫХГРУЗОВ | 1971 |
|
SU318528A1 |
| УСТРОЙСТВО для ПЕРЕГРУЗКИ ПОДВЕСОК ПОДВЕСНОГОКОНВЕЙЕРА | 1972 |
|
SU328045A1 |
| Вертикально-замкнутый тележечный конвейер | 1981 |
|
SU982992A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| УСТРОЙСТВО для НАЛОЖЕНИЯ ГРУЗА НА ФОРМЫ | 1966 |
|
SU189533A1 |
| Ь:;ССОЮЗНАЯ ш^кт^кт^т: | 1973 |
|
SU372131A1 |
| Копирное устройство | 1976 |
|
SU747610A1 |
т/
. ). J т I
/f / 777//7 f//Y Ч
// /
/....... /
/ 5 5Л /,6
..... 77T 7
9 S 5 /4 // Л5
