В известных автоматических установках для разрезания на кириичи выходящего из иресса глиняного бруса приемный транспортер уирап.пяет работой всех механизмов и приводится в действие глиняным брусом. Скорость глиняного бруса колеблется, и характер этих колебаний не связан какими-либо закономерностями и является неопределенным, поэтому скорость приемного транспортера должна воспронзводить все колебания скорости бруса. Однако изза проскальзывания бруса но ленте скорость приемного транспортера в эти моменты не равна скорости бруса, в результате чего размеры отрезанных кирпичей не соответствуют установленным.
В предлагаемом устройстве для устранения этого недостатка применен синхронизнруюпип ролик (транспортер), кинематически связанный с приемным транспортером, гюлучаюпип дополнительную MOHJHOCTB от электродвигателя, нитающегося постоянным током от усилителя че|рез электрический мост с сопротивлением (тензометрический датчик), закреилепным на валу синхронизирующего ролика.
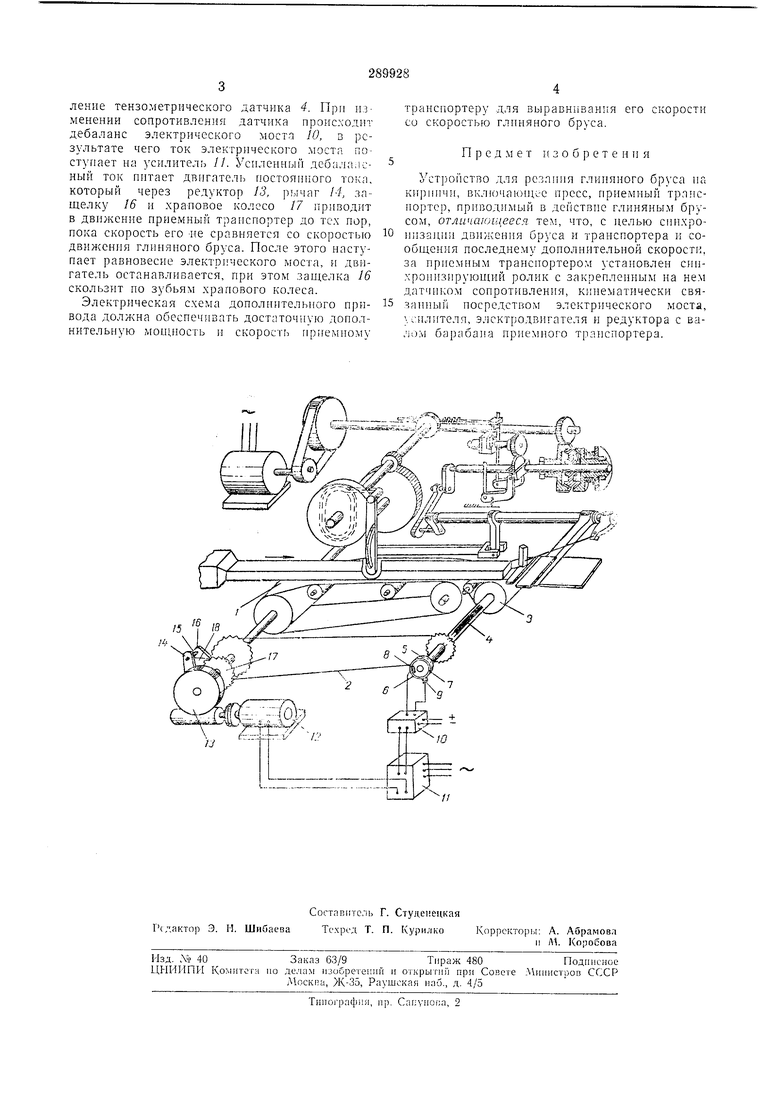
Па чертеже дана кинематнческая схема дополнительного нрнвода приемного транснортера автоматической резательной установки.
редачей 2 связан с валом синхронизирующего ролика 3. Передаточное число передачи 2 должно обеспечивать скорость приемного транспортера, равную скорости синхронизирующего ролика. На валу синхронизирующего ролика закреплен тензометрический датчик 4, выводы которого нрнсоедннены к изоляторному диску 5, к кольнам 7 и 6, к кольцам примыкают щетки 8 и 9, последовательно соединенные электрическим мостом 10, усилителем // и электродвигателем 12. соединенным с редуктором 13. Па валу редуктора закреплен рычаг М, на осп /5 которого кренится защелка 16 храпового колеса /7, закрепленного на валу барабаиа ириемного транспортера. Защелка к храповому колесу прижимается пружиной 18.
Автоматическая установка работает следуюИ1ИМ образом.
Глиняный брус, выходящий нз мундщтука ленточного пресса, приводит в действие приемный трансиортер автоматической резательной установки и синхронизнрующий ролик 3. В моменты проскальзывания глиняного бруса
на прнемном транснортере ролнк 3 стремится через цепную передачу 2 воздействовать на приемный транспортер, в результате чего вал синхроннзируюн|его ролика деформируется в пределах уиругих деформаций на скручиваленне тензометрнческого датчика 4. При иЗ менении сопротивления датчика происходит дебаланс электрического мостл 10, в результате чего ток электрического моста поступает на усилитель //. Усиленгплй дебала.сный ток питает двпгатель постояпиого тока. который через редуктор 13, рычаг //, защелку 16 и храповое колесо 17 приводит в движеиие приемиын транспортер до тех пор, пока скорость его не сравняется со скоростью движения глиняного бруса. После этого наступает равновесие электрического моста, и двигатель останавливается, при этом защелка 16 скользит по зубьям храпового колеса.
Электрическая схема дополнительного привода должна обеспечивать достаточную дополнительную .мопиюсть и скорость приемному
транспортеру для выравнивания его скорости со скоростью глиняного бруса.
П р е д .м е т и. з о б р е т е н и я
Устройство для резания глиняного бруса на кирпичи, включаюп1ее пресс, нриемный тра 1спортер, приводимый в действие глиняны.м брусом, отличавшееся тем, что, с целью синхронизанни движения бруса и транспортера и сообщения последнему доиолнительной скорости, за приемным трансиортеро устаиовлен синхронизирующий ролик с закрепленным на нем датчнком сопротивления, кинематически связанный посредством электрического моста, силителя, электродвигателя и редуктора с валом барабана приемного транспортера.
Eisi:; : S -4/Х- 1 .
// cdlM)
....,.J11
i-af-ii ъ,/
ЦЬаВГ : ts53Li@j: USBJWi.,V,
