Изобретение относится к грузозахватным приспособленато.м, содержащим вилочный захват, защитную корзину и устройство для автоматического Совмещения оси центра тяжести поднимаемого груза с осью подвески приспособлбния.
Цель изобретения - упростить -в такого рода приспособлениях упомянутое совмещающее устройство и использовать его для автоматического закрывания и открывания защитной корзины.
Достигается это тем, что совмещающее устройство содержит рабочий цилиндр, прикрепленный к двум боковым направляющим, являющимся продолжением верхней части вилочного захвата и имеющим продольные вырезы для катков .каретки, иодвещевной к «рюку крана. Каретка соедданена со щтоком рабочего цилиндра и несет на свободном коице ролик, который при перемещении ка-ретки под воздейстние.м веса груза освобождает взаимодействующий С ним эвольвентный рычаг, соедииенный с «есущей осью поворотной части защитной корзииы, и позволяет рычагу поворачиваться вместе с поворотной частью корзины, закрывая груз, находящийся в приспособлении. При опускании груза иа опору, сжатый ври подъеме груза воздух Б цилиндре через порщень и щток перемещает освобожденную от веса груза каретку в обратном
направленш, и она, воздействуя роликом на эвольвентный рычаг, открывает .корзину.
боковых стенок поворотной части корзины в «ижних углах имеют гнезда для
лодпружиненных щтьфей блокп.рзющего устройства, расположенных в неподвиионой части корзины и автоматически запирающих поворотную часть корзпНЫ в закрытом положенни с помощью рычаж.но-тросового приспособления, управляемого роликом каретки.
В другом варианте подвесное устройство грузозахватного приспособления может .содержать гидроцилпндр. Надпорщневая полость гпдроцилиндра соединяется в этом случае
трубопроводами с лидравлическимп корпусам вилок захвата, содврл ащиМИ выдвижные пластины, .которые служат для зажима поднимаемого груза. Пластины выдвигаются .под действием силы давления рабочей л идкости, выдавливаемой из гидроцплиндра ири подъеме приспособления с грузом. При исиользоваНии этого второго варианта изобретения применение поддонов при подъеме грузов не требуется.
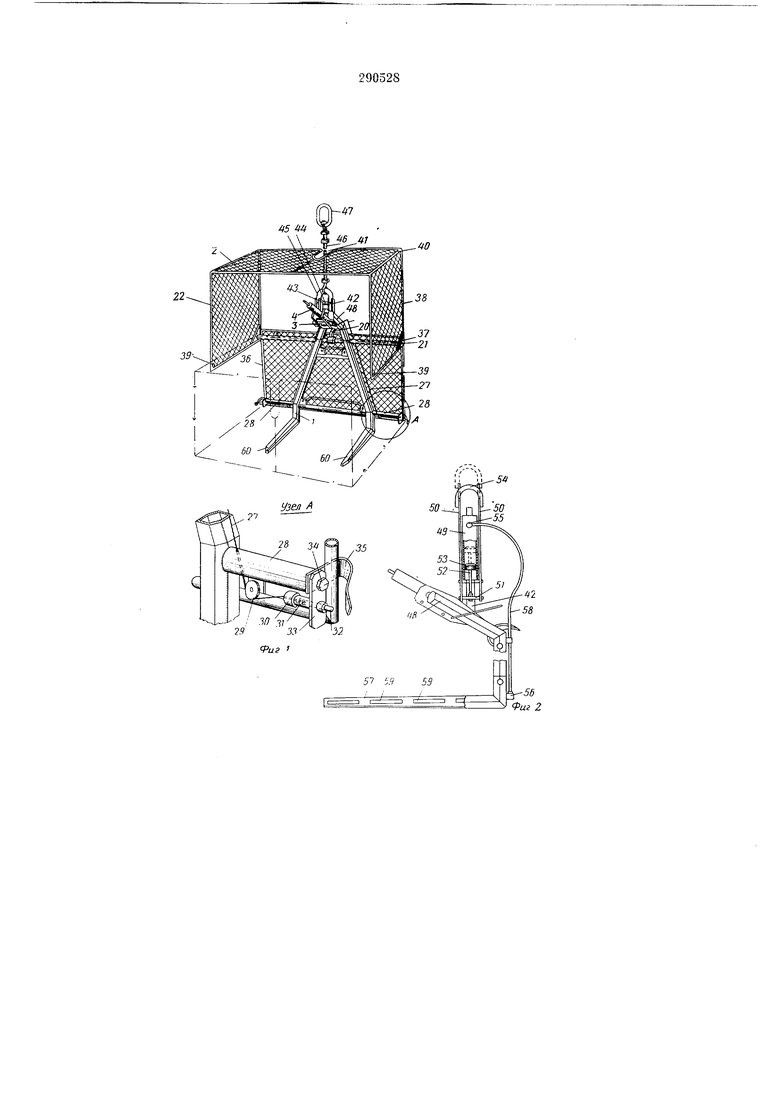
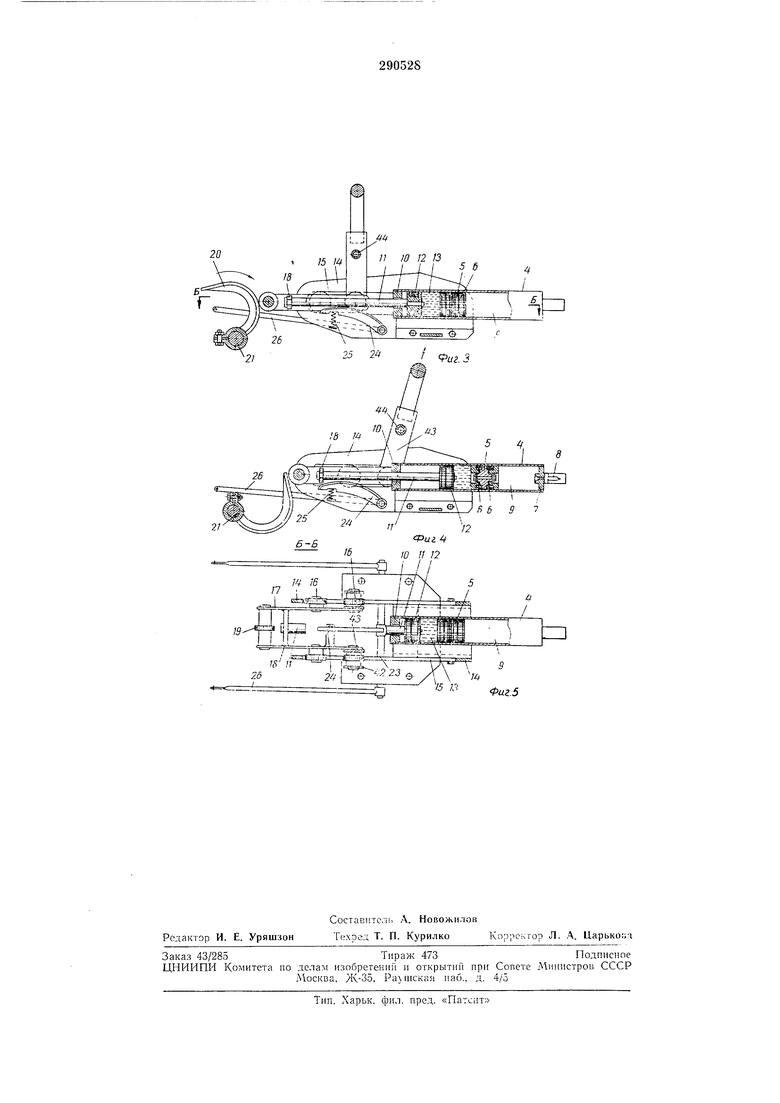
На фиг. 1 изображено грузозахват/ное приспособление, в аксонометрии; на фиг. 2 - другой вариант выполнения грузозахватного приспособления с гидравлическим приспособлением для подвеса и с гидравлическими вилло оси фабочего цилиндра в положен™- при нагружеином приспособлени.и; -на фиг. 4 - то же, в разгруженном положении; на фиг. 5 - разрез по на фиг. 3.
Грузозахватное приспособление содержит вилОЧнын захват 1, защитную корзину 2 и устройст1во 3 для автоматического совмеиде Ния оси центра тяжести поднимаемого груза с осью подвески лриспособлеиия.
Осиовиым узлом совмещающего устройства является рабочий цилиндр 4. В рабочем цилИИдре расположен свободно перемещающийся Сдвоевный иОрщень 5, с уплотненияМИ 6. Пространство между сдвоенным ,порщнем 5 и крышко Й 7 рабочего цилиндра, В котором имеется воздущ;ный .клапаи 8, заполлено воздухом и обозначено на чертеже цифрой 9. С другой стороны рабочий цили1 1др закрыт резьбо;вой пробкой 10, через которую проходит 11 порщня 12. Пространство 13 между обоими порщиям и запол-иено маслом. Рабочий цилиндр укреплен на боковых направляющих 14, являющихся продолжением верхней части вилочиого захвата /. Бо ковые :наП|равляющпе 14 в своей средней части имеют продольные вырезы 15, в которые вставлены катки 16 каретки 17. К поперечине 18 каретки крепится свободный «онец щтока 11 поршня 13. Свободный конец каретки несет ролик /.9, взаимодействующий с эвольвентным рычагом 20, соединенным с несущей осью 21 поворотной части корзИНы.
В средней части боковых направляющих 14 проходит ось 23, на которой ;ie1ПОДВИЖ1НО закреплен рычаг .кулисы 24. Свободный конец этого рычага имеет вырез, в который входит пружина 25. На свободных -концах оси 23 неподвнжчю закреплены рычаги 26, свобсдиые концы которых связа-ны с тяговым тросом 27, проходящим через трубу 28, 1напра1вляющнй ролик 29 и направляющую 30 с тружнной 31 до фиксатора 32. Фиксатор 32 проходит через пластину 33, которая закреплена ;на трубе 28 болтом 34. Тем же болтом 34 на трубе 28 закрепляются захваты 35 боко,вой рамы корзнны.
Защитная корзина состоит из рамы 36 задней стенки, на которой проволочная сетка. Эта рама ненодвижно креггится к трубчатой опоре 37 и трубе 28. На опору 37 насаживаются рамы 38 боковых стенок, в нижнем углу которых имеются лнезда 39 для фиксаторов 32. Рамы боковых стенок соединены друг с другом рамой 40 передней стеиКИ, которая Имеет в средней верхней части вырез 41. Каретка 17 соединена с парой внешних серег 42 и 1парой Внутрениих подвесных серег 43. Оба свободных конца внутренних подвесных серег 43 соединены распорной перемычкой 44; между одной внутренней и одной внещней серьгой закреплена скоба 45. К скобе крепится трос 46, который другим концом закрепляется иа подвесном кольце 47 для подвеса присиособления к крапу или к какому-либо другому устройству для подъема.
Во Втором варианте исполнения последовательиость расположения элементов та же, что и в предыдущем примере, поэтому на фиг. 5 представлены лишь пекото зые cocTaiBные части, например удлинитель 48 стойки вилки и внещняя серьга 42. Нара нодвесных серег 42 связана с нижией частью рабочего пилиндра 49, Введепмого в затя нутые пластины 50, соединеннь е ina одном кои не шт 1фтом
51, который ОДновремен-по проходит сквозь свободный конец штока 52. Другой конец щчтока 52 песет по рщень 53 рабочего цилпндра 49. ПротивополоЖНые концы пластин 50 связаны скобой 54. На рабочем цилиидре
имеется штуцер 55, от которого к штуцеру 56 с задней стороны иолой лаиы 57 проходит трубопровод 58. Полая лапа 57 ;находится в средней осевой плоскости вилочного захвата. В полой лапе смонтированы выдвижные пластины 59.
Преимущества второго варианта заключаются в том, ЧТО по-ддОН становится ненуж-ным, так как полая , соединенная с доиолнителыным гидравлическим устройством,
смонтированным между подвесными серьгами и скобой, обеспечивает зажатие груза между ней и вилка.ми 60.
Грузозахватное приспособлеине работает следующнм образом.
На поддон (на чертежах не показан) устаиавливается груз. Крюк красна или какого-либо другого подъем ного устройства вводят з подвесное кольцо 47 и вдвигают вилки захвата в отверстия поддона. В начале иодтэема
груза каретка 17 иод действием веса груза втягивает шток 11 в цилнндр 4. Катки 16 каретки иеремещаются при этом в вырезах 15 боковых паправляющ их 14, а 1:1одвесные серьгп 42 и 43 со скобой 45 занимают положение
под углом 30° к вертикал1И, как это показаио на фиг. 3. Поршень 12 сжимает при этом в пространстве 13 масло, которое давит, в свою очередь, на сдвоенный псршень 5 IB направлении крыщки 7 рабочего цилиндра 4. В результате этого ироисходит сжатие воздуха в пространстве 9, н после того, как груз будет снят, сжатый воздух воспроизводит тот же процесс щ обратном :наиравлснии. Одновременно с описанным выше процессом за роликом 19, подающимся назад вместе с кареткой иеремещается в наИравлении стрелки эвольвентный рычаг 20, в результате чего несущая ось 21 поворачивает защгггную корзи1ну. После того, «ач щток 11 проделает четверть пути
в рабочем цилиндре, груз будет пол1иостью закрыт. При разгрузке процесс ироисходит в обратной Последовательности. При движеиии щтока н рабочем цилиндре ро.чик 19 давит также на рычат кулисы 24, которьгй иоворачивается 1вниз 1И воздействует -на тяговый трос, который ослабляется, и пружина 31 вдавливает фиксатор 32 в гнездо 39 защитной корзины.
ния оси центра тяжести груза с осью подвески .приопособлеиия связаиа еще с гидравлическим устройством, которое перемещает рабочую жидкость в полую лапу, с ПОМощью которой груз зажИмается между ВИЛ1кам И 60, что дает возможность отказаться от поидо а. Когда кран или другое подъемное устройство поднимает лрдаспособленИе, скоба 54 перемещается вверх. При этом поршень 55, щток 52 кото-рого соединен щтифтом 51 с лластииаМи 50, также перемещается вверх, Причем рабочий цилиндр 49 остается на месте, так как он жестко соединен с подвесными серьгами 42. Давление жидкости, .возникающее в рабочем цилиидре 49, .передается через трубопровод
58в полую лапу 57, и выдВИЖ1ные пластины
59закрепляют материал. При разгрузке процесс происходит в обратной последовательности.
Предмет изобретем и я
1. Грузозахватное приспособление, содержащее вилочный захват, защитную корзину и устройство для автоматического совмещения оси центра тяжести поднимаемого груза с осью подвески приспособления, отличающееся тем, что, с целью упрощения упомянутого устройства для автоматического совмещения и использования его для автоматического закрывания и открываеия защитной корзины, оно содержит рабоЧИЙ цилиндр, прикрепленный к двум боковым на.правляюЩИм, являющимся продолжением верхней части вилочного захвата и имеющим продольные вырезы для катко1з каретки, подвещенной к крюку крана и соединенной со
штоком рабочего цилиндра, а также несущей на свободном конце ролик, который при nepi-мещении каретки под воздействием веса груза освобождает взаимодействующий с ним
эвольвентный рычаг, соединенный с несущей осью поворотной части защитной корзины, и позволяет этому рычагу поворачиваться вместе с Поворотной частью корзины, закрывая груз, 1находящийся IB приспособлении, при
опускании груза на опору сжатый -при подъеме груза воздух в цилиндре через норшань -и щток перемещает освобожденную от силы тяжести груза каретку в обратном направлении, и она, воздействуя роликом на
эвольвентный рычаг, открывает корзину.
2.Грузозахватное приспособление по п. 1, отличающееся тем, что рамы боковых стенок поворотной части корзины в нижних углах имеют гнезда для подпружиненных штырей
блокирующего устройства, расположенных в неподвижной части корзины и автоматичесви запирающих поворотную часть корзины в закрытом ноложении с помощью рычажно-тросового приспособления, управляемого роликом каретки.
3.Грузозахватное приспособление по п. 1, отличающееся тем, что для использования его без поддО на его подвесное устройство содержит гидроцилнндр, надпоршаневая полость которого соединена трубопроводами с гидравлпческими корпусами вилок захвата, содержащими выдвижные пластины, зажимающие подн 1маемый груз под действием силы давления рабочей жидкости, выдавливаемой из
гидроцилиндра при подъеме приспособления с грузом.
-47
5
0
Т4 Ж
.4. ix
lists
/5
V
Фиг
/6да я /2
Iл ; / /
/ / /
ГА/
..лл . . т/ / I
т ЧТХО-У.
I «0 ЧП
/5 /Л
Фиг.5

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Перегрузочное устройство подвесного конвейера | 1981 |
|
SU988718A1 |
| ПОДВЕСНОЕ ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО | 1992 |
|
RU2076841C1 |
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |
| Передаточное устройство подвесного конвейера | 1980 |
|
SU958274A1 |
| Грузоподъемное устройство | 1975 |
|
SU619424A1 |
| Установка для упаковки рулонов на поддоне | 1979 |
|
SU861174A1 |
| Кантователь угольных подовых блоков для алюминиевых электролизеров | 1980 |
|
SU885361A1 |
| Устройство для навешивания и съемаиздЕлий | 1979 |
|
SU806566A1 |
| Автоматические клещи для захвата груза | 1935 |
|
SU49115A1 |