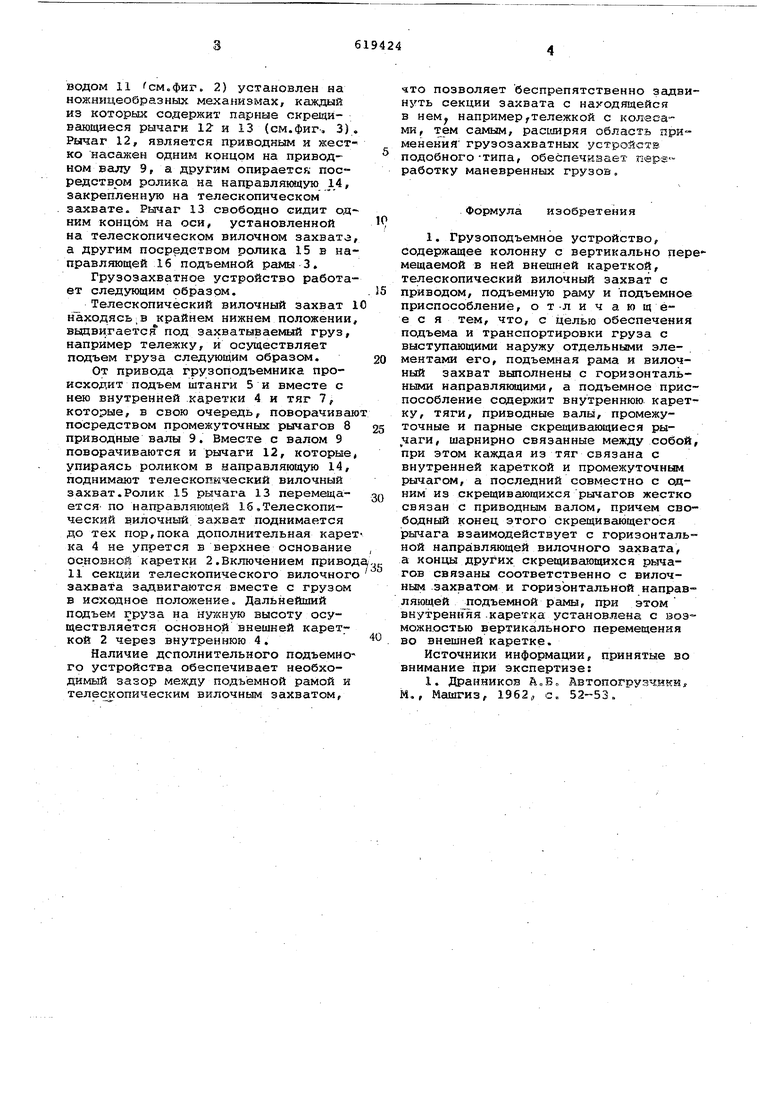
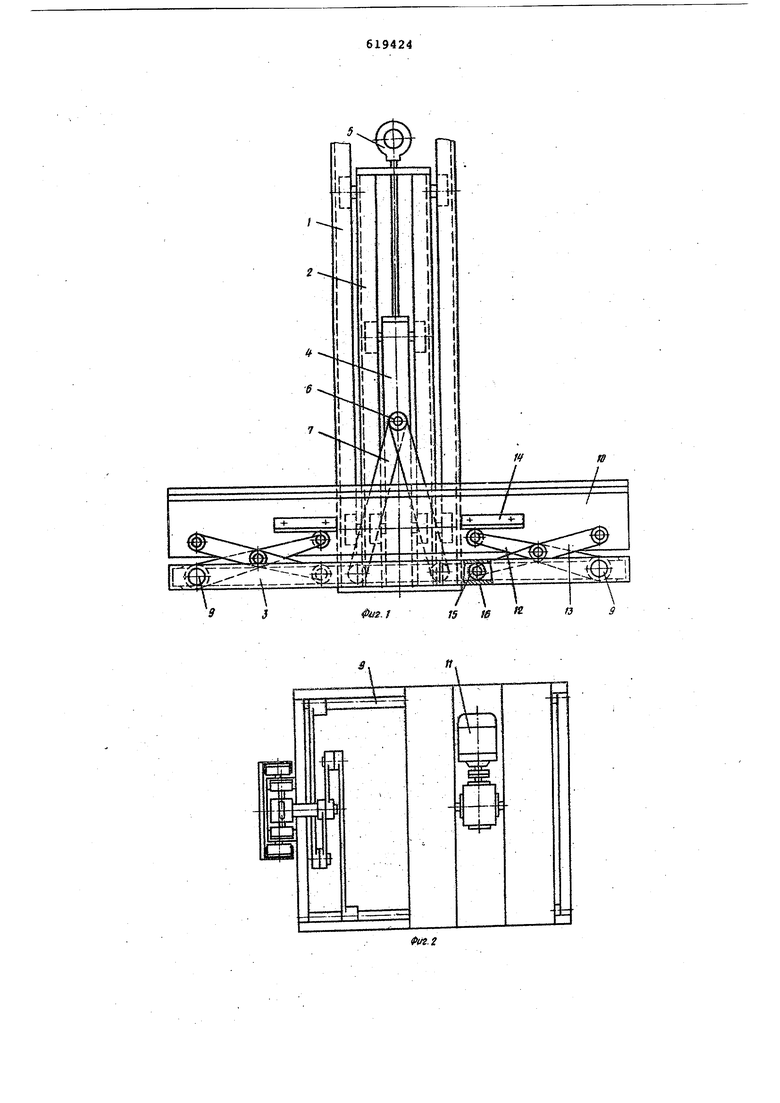
Изобретение относится к подъемнотранспортному машиностроению. Известно грузоподъемное устройство, содержащее колонну с вертикально перемещаемой в ней внешней кареткой, телескопический вилочный захват с пр водом, подъе лную раму и подъемное приспособление . Недостаток указанного устройства заключается в невозможности подъема и транспортировки груза с выступающими наружу отдельными элементами . груза. Цель изобретения - обеспечение подъема и транспортировки груза с выступакндими наружу отдельныют элементами груза. Для этого подъемная рама и вилочный захват выполнены с горизонтальными направляющими, а подъемное прис пособление содержит внутреннюю каретку, тяги, валы, промежуточные оди ночные и парные скрещиванядиеся рычаги, шарнирно связанные между собой При этом каждая из тяг связана с внутренней кареткой и промежуточным рычагом, а последний совместно с одним из скрещивающихся рычагов жестко связан с валом, причем свободный конец этого скреи}ивак1щегося рычага взаимодействует с горизонтальной направляющей вилочного захвата, а концы других скрещивающихся рычагов связаны соответственно с вилочным захватом и горизонтальной направляющей подъемной paNH, при этом внутренняя каретка установлена с возможностью вертикального перемещения во внешней каретке. На фиг. 1 схематически изображено описываемое устройство, вид спереди; на фиг. 2 - то же устройство, вид сверху; на фиг. 3 - показан вилочный захват с внутренней кареткой. Грузозахватное устройство содержит колонну 1, в направляющих Kotoрой установлена внешняя каретка 2, .жестко соединенная с подъемной рамой 3, с перемещаемой внутри нее внутренней кареткой 4 со штангой 5 и насаженными на закрепленную в ней ось 6 7. Тяги шарнирно соединены с промежуточными рычагами 8 (см.фиг. 3), жестко насаженными на валы 9, вмонтированные в подъемной раме 3 и являквдиеся приводными элементами подъемного приспособления. Телескопический вилочный захват 10 с расположенным внутри его приВОДОМ 11 см«фиг 2) установлен на ножницеобразных механизмах, каждый из которых содержит парные скрещивающиеся рычаги 12 и 13 (см.фиг-, 3) . Рычаг 12, является приводным и жестко насажен одним концом на приводном валу 9, а другим опирается посредством ролика на направляющую 14, закрепленную на телескопическом захвате« Рычаг 13 свободно сидит одним концом на оси, установленной на телескопическом вилочном захвати, а другим посредством ролика 15 в направляющей 16 подъемной рамы 3.
Грузозахватное устройство работает следующим образом.
Телескопический вилочный захват 1 находясь3 крайнем нижнем положении, выдвигается под захватываемый груз, например тележку, и осуществляет подъем груза следующим образом.
От привода грузоподъемника происходит подъем штанги 5 и вместе с нею внутренней каретки 4 и тяг 7, которые, в свою очередь, поворачиваю посредством промежуточных рычагов 8 приводные валы 9. Вместе с валом 9 поворачиваются и рычаги 12, которые, упираясь роликом в направляющую 14, поднимают телескопический вилочный захват.Ролик 15 рычага 13 переметаетсЯ по направляющей 16.Телескопический вилочный захват поднимается до тех пор,пока дополнительная каретка 4 не упрется в верхнее основание основной каретки 2.Включением привод 11 секции телескопического вилочного захвата задвигаются вместе с грузом в исходное положение. Дальнейший подъем груза на нужную высоту осуществляется основной внешней кареткой 2 через внутреннюю 4.
Наличие дополнительного подъемно го устройства обеспечивает необходимый зазор между подъёмной рамой и телескопическим вилочным захватом.
что позволяет беспрепятственно задвинуть секции захвата с находящейся в нем например,тележкой с колесами, тем самым, расширяя область применения грузозахватных устройств подобного-типа, обеспечивает пер®- работку маневренных грузов.
Формула изобретения
1. Грузоподъемное устройство, содержащее колонну с вертикально перемещаемой в ней внешней кареткой, телескопический вилочный захват с приводом, подъемную раму и подъемное приспособление, от-личающее с я тем, что, с целью обеспечения подъема и транспортировки груза с выступающими наружу отдельными элементами его, подъемная рама и вилочный захват выполнены с горизонтальными направлякидими, а подъемное приспособление содержит внутреннюю каретку, тяги, приводные валы, промежуточные и парные скрещивающиеся рычаги, шарнирно связанные между собой при этом каждая из тяг связана с внутренней кареткой и промежуточным рычагом, а последний совместно с одним из скрещивающихся рычагов жестко связан с приводным валом, причем свободный конец этого скрещивающегося рычага взаимодействует с горизонтальной направляющей вилочного захвата, а концы других скрещивающихся рычагов связаны соответственно с вилочным захватом и горизонтальной направляющей подъемной рамы, при этом внутренгТяя .каретка установлена с возможностью вертикального перемещения во внешней каретке.
Источники информации, принятые ао внимание при экспертизе:
1. Дранников А.В. АвтопогрузчикиJ М,, Машгиз, 1962„ с. 52-53.
Г5 №
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| Кран-манипулятор | 2024 |
|
RU2823660C1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО С РЕГУЛИРУЕМОЙ В ЗАВИСИМОСТИ ОТ ПОЛОЖЕНИЯ ЦЕНТРА МАСС ГРУЗА ТОЧКОЙ ПОДВЕСА | 2007 |
|
RU2344986C1 |
| ГРУЗОЗАХВАТНОЕ ПРИСПОСОБЛЕНИЕ | 1971 |
|
SU290528A1 |
| Грузозахватная система | 1990 |
|
SU1729990A1 |
| ПОГРУЗЧИК "ПРЯМАЯ ЛОПАТА" | 1993 |
|
RU2081052C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ВИЛОЧНОГО ПОГРУЗЧИКА | 1991 |
|
RU2011636C1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 1998 |
|
RU2141446C1 |
ff.
Im ВI
