Изобретение относится к средствам автоматизации производственных процессов на открытых горных разработках и может быть использовано для управления приводом поворота ковша при транспортировании и разгрузке материала механической лопатой, оборудованной поворотным ковшом.
Управление поворотом ковша для улучшения условий разгрузки производится машинистом экскаватора вручную по результатам визуального наблюдения. Однако при этом возможно просыпание материала в процессе транспортирования его к месту выгрузки, точность установки ковша в положение, обеспечивающее наилучшие условия разгрузки горной массы, недостаточна, а также необходимы дополнительные операции по управлению поворотом ковша.
Целью настоящего изобретения является улучшение условий разгрузки ковша.
Для достижения этой цели предлагаемое устройство выполнено с регулятором, подключенным к приводу поворота ковша. Один вход регулятора соединен с датчиком угла поворота ковша, а другой - с суммирующим элементом, к входу которого в свою очередь совместно с датчиком угла наклона экскаватора подключены датчик угла поворота рукояти и задатчик угла наклона стрелы.
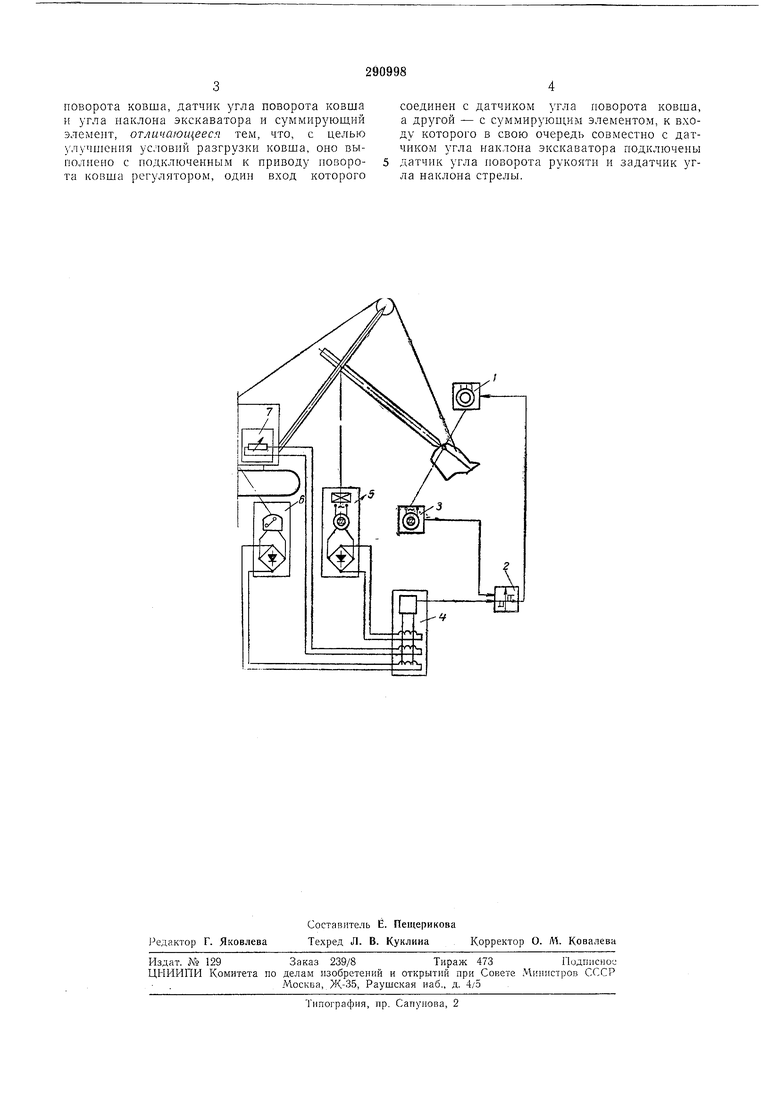
Предлагаемое устройство изображено на чертеже.
Привод / поворота ковша соединен с выходом трехпозиционного регулятора 2. Один вход регулятора соединен с датчиком 5 угла поворота ковша, например сельсином, кинематически связанным с осью поворота ковша экскаватора. Другой вход регулятора соединен с выходом суммирующего элемента 4,
например магнитного усилителя, на обмотки управления которого подаются напряжения, пропорциональные углам поворота рукояти экскаватора, продольного наклона экскаватора и наклона стрелы экскаватора.
Один из входов суммирующего элемента соединен с датчиком 5 угла поворота рукояти, например сельсином, связанным через понил-сающий редуктор с седловым подшипником механической лопаты с канатным напором.
Другой вход суммирующего элемента соединен с датчиком 6 угла наклона экскаватора, например маятником с потенциометрическим выходом, установленным на поворотной платформе экскаватора, а третий - с задатчиком
7 угла наклона стрелы экскаватора, например потенциометром.
поворота ковша, датчик угла поворота ковша и угла наклона экскаватора и суммирующий элемент, отличающееся тем, что, с целью улучшения условий разгрузки ковша, оно выполнено с подключенным к приводу иоворота ковша регулятором, один вход которого
соединен с датчиком угла поворота ковша, а другой - с суммируюншм элементом, к входу которого в свою очередь совместно с датчиком угла наклона экскаватора подключены датчик угла поворота рукояти и задатчик угла наклона стрелы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приво-дОМ пОВОРОТА КОВшА эКСКАВАТОРА | 1979 |
|
SU810913A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 1971 |
|
SU308153A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОВОРОТА КАРЬЕРНОГО ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347038C2 |
| Способ управления копающими механизмами экскаватора и устройство для его осуществления | 1982 |
|
SU1105577A1 |
| Устройство для управления экскаватором типа "прямая лопата | 1983 |
|
SU1113490A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПРИВОДОМ ПОВОРОТА КОВША МЕХАНИЧЕСКОЙ ЛОПАТЫ | 1973 |
|
SU375633A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Устройство для управления экскаватором типа прямая лопата | 1985 |
|
SU1364669A1 |
| Способ управления копающими механизмами экскаватора в транспортном режиме | 1985 |
|
SU1240839A1 |
| Устройство для управления механизмом поворота экскаватора | 1989 |
|
SU1744209A1 |
