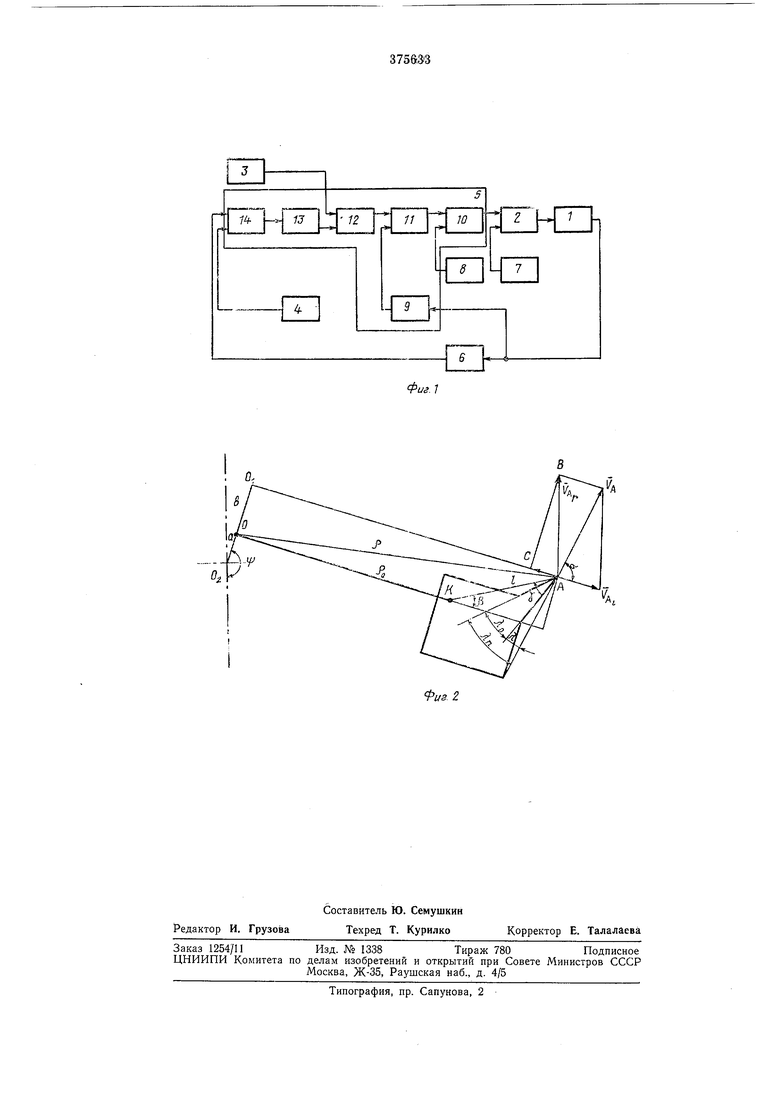
Изобретение относится к области автоматики, а именно к автоматизащии юроизводственных процессов на открытых 1горных разработках. Известно устройство для управления однокавшавым Э1кскаваторо1м, содержащее измеритель длины рукояти, задатчик угла резания, соединенные соотвегственно ic первым и вторым входами вычислительного устройства, вы.-сод которого связан с первым входом релулятора, подключенного к входу привода noBOipoта ковша, а его выход соединен с третьим входом вычислительного устройства и входом измерителя угла поворота ковша. Цель изо|б|ретения - обеспечение оптималь«ого угла р,еза«ия. Это достигается тем, что в устройство для управления приводом поворота ковша введены измеритель скорости выдвижения рукояти, соединенный с вторым входом регулятора, и измеритель угловой скорости поворота рукояти, выход которого и выход измерителя угла поворота ковша связаны соответственно с четве|ртым и пятым входами вычислительного устройства. На фит. I доказана блок-схема устройства для управления приводом. Она содержит: привод поворота ковша 1; регулятор 2; измеритель 3 длины рукояти; задатчик 4 угла резания; вычислительное устройство 5; измерители угла Поворота ковша 6, скорости выдвижения рукояти 7, угловой скорости поворота рукояти 8. Устройство 5 включает в себя синусный преобразователь 9; множитель 10; сумматор 11; множитель 12; котангенсный преобразователь 13; сумматор 14. На фиг. 2 схематически изображен ковш экскаватора с рукоятью. Приняты следующие обозначения: р - угол поворота ковша; г|з - угол поворота рукояти; Ко - угол заострения зубьев; Хк - угол резания; К Кп - о - задний угол резания; VA - абсолютная скорость точки А; VA I - Vs - аш - скорость точки А в переносном поступательном движении с мгновенным центром вращения (точка О); VA.J. - скорость точки А в относительном движении, которым является вращение рукояти вокруг точки О с угловой скоростью ю; а - угол между направлением вектора скорости VA и направлением оси рукояти; а, I, у - неизмененные конструктивные параметры экскаватора; РО - расстояние ОК; р - расстояние ОА. Из построений на фиг. 2 учитывая, что ААВС / АОЛОь можно определить угол а: V-H-(a-f-/slnp). о : arcctg (РО + I COS ) m
Для поддержания оптимальното угла резания угол (поворота |3 должен изменяться по заввсимасти
р а-Х-7.(2)
Угол р изменяется от - 30 до + 25°С. Учитывая, что РО 3-f-5/, составляющая /cos р изменяет угол о в диапазоне изменения р от - 30 до + 25°С н€ более чем на 30, угол же о При этом изменят1ся в пределах 35-90°. Поэтому с незначительной погрешностью можно зависимость (1) представить в следующем виде
a :arCCtg -/-+7 (3)
(ро + О
Подставляя в уравнение (2) значение о, получим
I(p. + Octg(A + T + + ) l/H, (4)
Рещение уравнения (4) определяет значение угла р, при KOTOpoiM устанавливается заданный угол резания, при произвольных значениях РО, УН, со.
Согласно блок-схеме уст|ройства (фиг. 1) привод поворота ковша / соединен с выходом регулятора 2, входы .которого связаны ic измерителем 7 скорости выдвижения рукояти и выходом .множителя 10. Одии вход .множителя 10 подключен к измерителю 8 угловой iCKoрости поворота рукояти, а другой - к выходу сумматора //. Один из вхо.дов сумматора соединен с синусным преобразователем 9, кинематически 1связанным с приводом поворота ковша, а другой - с выходом множителя 12, входы последнего связаны с и.змерителем 3 длины рукояти и .выходом котанпеноного преобразователя 13. Вход котангенснаго преобразователя Подклкучен к выходу сумматора 14, один из входов сумматора соединен с за.датчиком 4 утла резания, а другой .вход - с измерителем 6 угла поворота конша, кинематически связанным с приводам поворота ковша.
Предла.гаемое устройство 1работает следуюш,им образом.
На вход сумматора 14 -подается сигнал с задатчика 4 угла резания и сигнал с измерителя 6 угла поворота ковша, например индуктивного датчика угла поворота. Выходной сигнал сумматора 14, пропорциональный сумме углов X + Y + Р (угол А, + 7 const, задается постоянным смещением еуля сумматора), поступает на котанген1сный горео бразователь 13, например элект ромеханический преобразо(ватель напряжения в угол поворота и функциональный потенциометр.
Выхо.дная величина котангенсного преобразователя подает1ся на множитель 12 и перемножается в нем с величиной, поступающей с измерителя 5 длины рукояти. Выходной сигнал множителя 12, пропорциональный величине (РО + /)ctg(A. + Y + Р) суммируется ;в сумматоре 11с сигналам, пропорциональным ,/ sin р, .поступающим на другой вход сум.матора с синусного преобразователя 9, например сельсина.
Выходной .сигнал сумматора (ро -f /)ctg(A. + + Y + Р) + / sin р умножается в множителе 10 на сигнал угловой скорости поворота рукояти ю, (Снимаемый с измерителя 8 угловой скорости поворота рукояти напр.и-мер тахогенаратора, связанного с седлавым подшипником через павышающий редуктор.
Силнал, пропорциональный произведению (ро + /) ctg(A, + Y + р + sin р (и, снимаемый с множителя 10, поступает на вход (регулятора 2. На другой вход регулятора прокодит сигнал .скорости выдвиж.ения рукояти измерителя 7 скорости выдвижения рукояти, например тахогенератора, установленного на валу двигателя напорно-возвратного .механизма.
В регуляторе 2 эти сипналы оравниваются. При нарушении равенства (po+Octg(A+Y + + Р) + sin Р -f V& .которое может проИ.ЗОЙТИ из-за изменения параметров VB, «, ро, р.егулятор 2 включает привод поворота ковша 1, изменяющий угол поворота ковша в направлении, устраняю щем раосогласованию сигналов, по1ступаю.щих на вход регулято ра. При равенстве этих .сигналов регулятор отключает привод.
Предмет изобретения
Устройство для управления приводом поворота ковша механической лопаты, содержащее измеритель длины рукояти, задатчик угла резания, соединенные соответственно с первым и вторым входами вычислительного устройства, выход которого соединен с первым входом регулятора, подсоединенного к входу привода поворота ковша, .выход которого соединен с третьим входом вычислительного устройства и входом измерителя угла (поворота ковша, отличающееся тем, что, с щелью Обеспечения оптимального угла резания, оно содержит измеритель скорости выдвижения рукояти, соединенны-й с вторым входом регулятора, и измеритель угловой скорости поворота рукояти, выход которого и выход измерителя угла поворота ковша соединены соответственно с четвертым и пятым входами вычислительного устройства.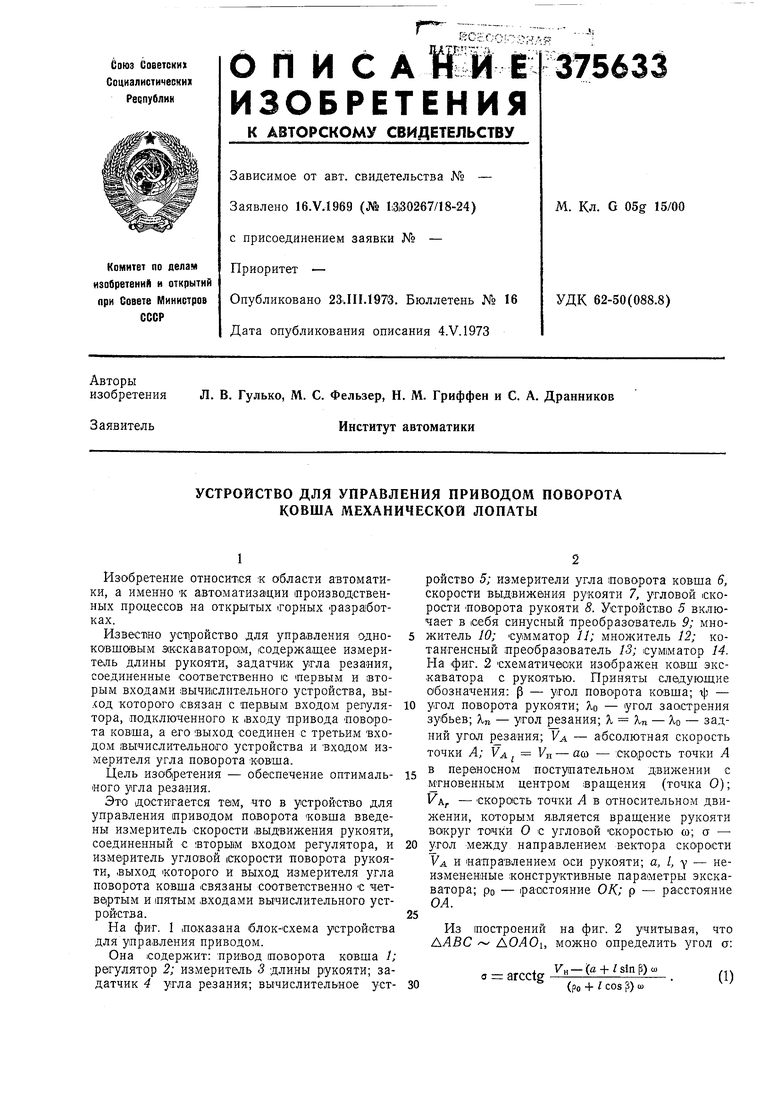
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 1971 |
|
SU308153A1 |
| Устройство управления глубиной копания землеройной машины | 1988 |
|
SU1587150A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕКАМЕРОЙ | 2001 |
|
RU2200971C2 |
| Система управления глубиной копания землеройной машины | 1988 |
|
SU1661302A1 |
| Устройство для записи траекторий движения зубьев ковша одноковшового экскаватора | 1975 |
|
SU590408A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Устройство для автоматического управления экскаватором | 1977 |
|
SU692950A1 |
| Устройство для определения загрузкиКОВшА дРАглАйНА | 1978 |
|
SU812886A1 |
| ССГСОЮЗНАЯ !^-;'1-'пП-Т?ХИЙНЕОНАЙ[v-БЛИОТЕМА | 1971 |
|
SU297962A1 |
| Функциональный преобразователь угла поворота вала в код | 1974 |
|
SU559257A1 |