Известно устройство для управления одноковшовым экскаватором, включающее привод поворота ковша и привод напорно-возвратно10 механизма с регулятором, задатчики угла наклона стрелы, угла резания и угла наклона лобового откоса.
Однако в известном устройстве невозможно поддерживать оптимальный угол резания.
В предлагаемом устройстве для обеспечения оптимального угла резания на всей траектории копания его, регулятор привода поворота ковша соединен с задатчиком угла резания и через суммирующее устройство с задатчиком угла наклона лобового откоса.
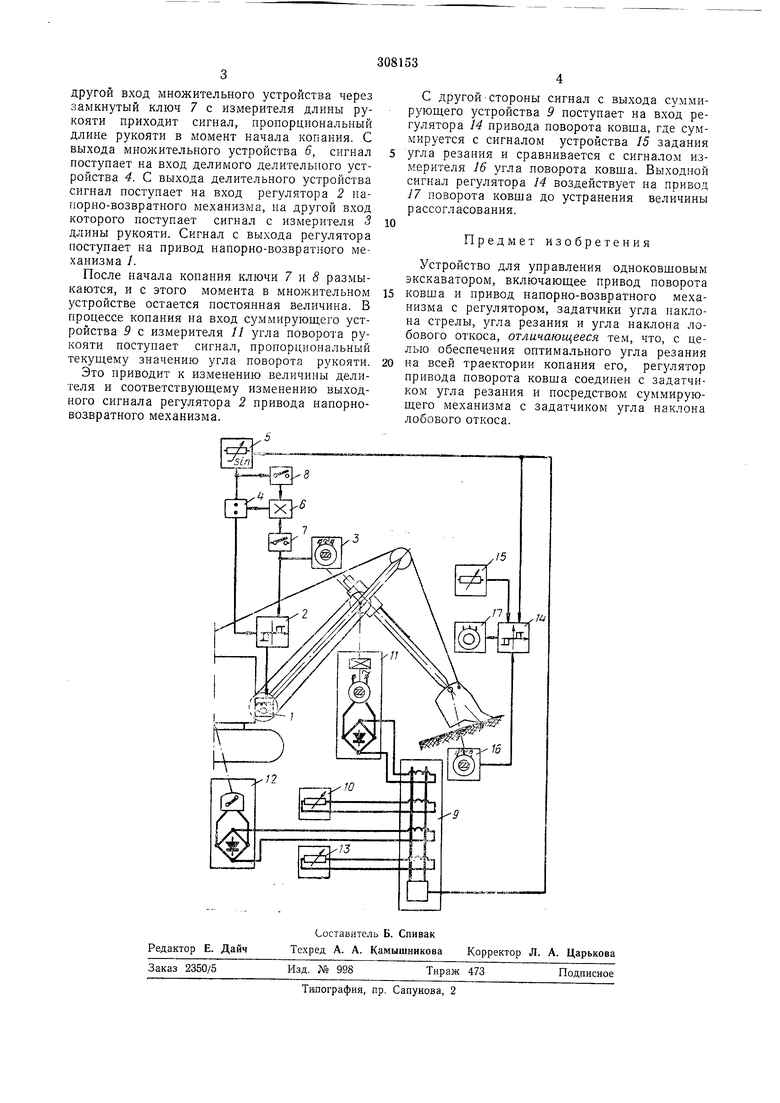
На чертеже представлена блок-схема устройства.
В устройстве привод 1 нанорно-возвратного механизма соединен с выходом регулятора 2, один из входов которого соединен с измерителем 3 длины рукояти, а другой - с выходом делительного устройства 4. Один из входов делительного устройства соединен с выходом синусного преобразователя 5, а другой - с выходом множительного устройства 6.
Входы множительного устройства через ключи 7 и 8 связаны с измерителем длины рукояти и синусным преобразователем, вход которого соединен с суммирующим устройством 9. Один из входов суммирующего устройства связан с задающим устройством 10 угла наклона лобового откоса, второй - с измерителем // угла поворота рукояти, третий - с измерителем 12 угла продольного наклона поворотной платформы экскаватора и четвертый - с задатчиком 13 угла наклона стрелы экскаватора. На выход суммирующего устройства 9 подсоединен регулятор 14 привода поворота ковша. Два других входа регулятора связаны с
устройством 15 задания угла резания и измерителем 16 угла поворота ковша, а выход регулятора соединен с приводом /7 поворота ковша.
Перед началом копания ковш устанавливают в начальную точку заданной наклонной траектории. При этом с измерителя 11 угла поворота рукояти на один из входов суммирующего устройства поступает сигнал, пропорциональный углу поворота рукояти в момент начала копания. На остальные входы суммирующего устройства 9 поступают сигналы с задатчика 10 угла наклона лобового откоса, измерителя 12 угла продольного наклона экскватора и задатчика 13 угла наклона стрелы экскаватора. С выхода суммирующего устройства 9 сигнал подается на в.ход синусного преобразователя 5, с выхода которого сигнал поступает на вход делителя делительного устройства 4 и через замкнутый ключ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приво-дОМ пОВОРОТА КОВшА эКСКАВАТОРА | 1979 |
|
SU810913A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПРИВОДОМ ПОВОРОТА КОВША МЕХАНИЧЕСКОЙ ЛОПАТЫ | 1973 |
|
SU375633A1 |
| Устройство управления глубиной копания землеройной машины | 1988 |
|
SU1587150A1 |
| Система управления глубиной копания землеройной машины | 1988 |
|
SU1661302A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Устройство для автоматического управления экскаватором | 1977 |
|
SU692950A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПРИВОДОМ ПОВОРОТА КОВША ЭКСКАВАТОРА | 1971 |
|
SU290998A1 |
| Устройство для записи траекторий движения зубьев ковша одноковшового экскаватора | 1975 |
|
SU590408A1 |
| Рабочее оборудование экскаватора | 1986 |
|
SU1435718A1 |
| Способ управления копающими механизмами экскаватора и устройство для его осуществления | 1982 |
|
SU1105577A1 |
