Изобретен1 е отноеится к области исиытаиИ1 | ii-i физического моделировани/ : лектр1;ческих двигателем и предназначено для обеспечения момент; сонрот-ИоЛення на залу элс-ктродв:игателя при ирактически любых зависимостях момента сопротивления от скорости вращения, а также от времени.
Аналогичные по своему назначеиию устроГ:ства известны. В }|их момент сонротивленн 1 на валу испытуемого диигателя создае ся генератором постоянного тока (ГПТ) с независимым зозбуждениел, rs цень якоря которпого включен i:ieKTj3OMcaiiHHHi)irt усилитель (ЭМУ), имеюн ;и 1 иризодноГ двигатель. Регулирование нозбуждения в (ункдин скорости вращения обеспечивает необходимые мо.меятио-скоростные характеристики.
Однако для обеснече-ния требуемого момента сопротивления на валу HcribnycMcj, о двигателя помимо системы регулирования и.пользуются (в дву.х агрегатах) три электрические -Мап)нны, мон,ность которых должна быть не мепыне мощности ис1 ытусмого диигателя, - генерат(;р носгоянного тока. ЭЛиУ И его приводной двигатель. Так как рег-улпрование производится путем измепенмя во:,буждеиия машины постоянного тока , то Г5 ряде случаев (например, при восироизведсн«и ударной 1агрузки) нельзя ие считат:--я с динaмичecки iи погрешностями и отрабог
ке момента на . Кроме того. Не могут оыть полное 1Ыи усгра.чены погрешности, OLуеловленные гистерезисом. При резких измсненнях .момента сопротивления возможи ,; колебания скорости , что создает допо,; нительные no::)e:u;icCTu восиропзиедеипя М( мента. ,1ля лстрапения этого необходн ю иметь привод Э.У cyntccTi eHfiO завышенно; лющности.
Описываемое устроГгство позволяет воспроизводить ие только моментно-скоростные, lio и .момеитно-вре.меииые характеристики, причем его схе.ма обес:;еч)П5аст быстродействие, В151сокую точность воспроизведения казанных характеристик, а также возвраиинне в сеть переменного тока значительной uiCTii э.чектроэнергпп. ;ютpcбляe ;oй испытуемым двигателем.
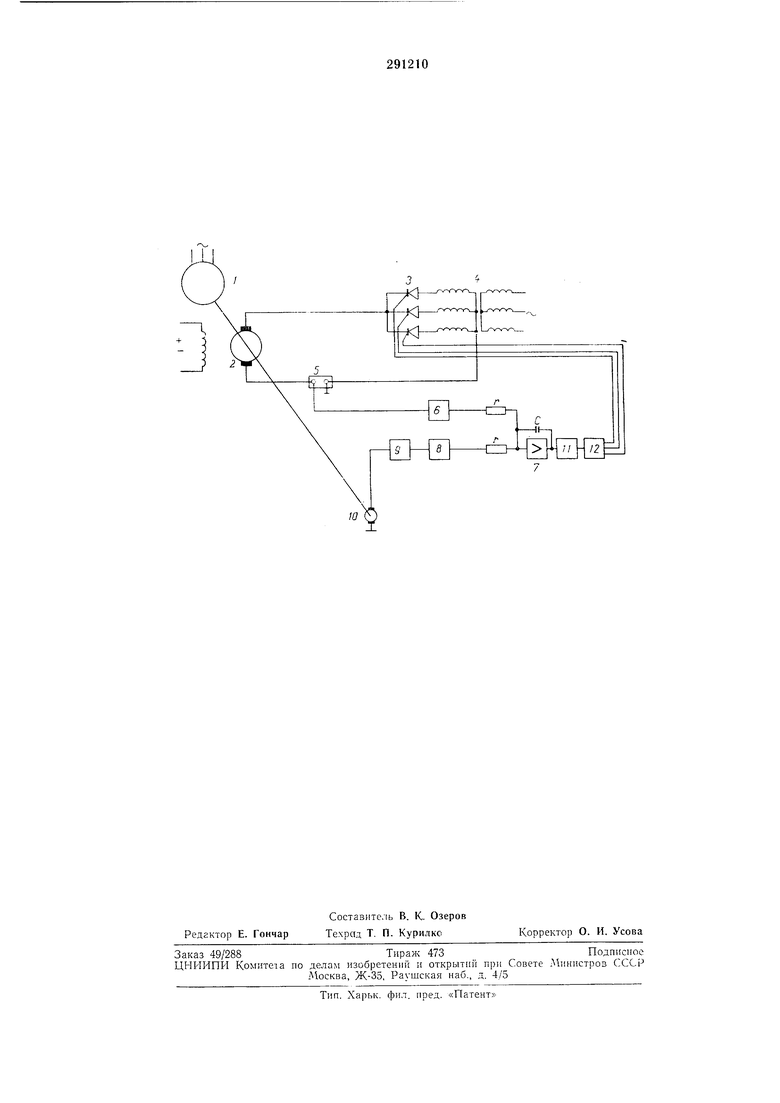
Это достигается гем, что генератор постоянного тока ГПТ, обеспечивающий тpeбye ыи момент сонротнвлепия, подключен к сетп переменного тока тиристорньп инвертор и Б ттепь якоря ГПТ включен датчик тока, выход когорого подсоед 1не1; к cxe:.ie регулирования, соедииеппо т;;кже с датчгнком скорости вращения и зоздеГ|Ств () на } равление тиpиcтopa iп ппве:;тора.
, Tiipncroplliilii llilHCpTOp -i,
трансформатор овязп с :етыо iicpCMeinioi-Q 1гаприжсм ия 4, датчик 1ика якоря 5, усилпте.Пз nocTOsiuiioio тока о, iiiiTcrpii|)yi()iu,iii уси.Штсль 7, программное усГ|;о11стио 8. лервыи jjyiiKUi()iia,: biibi; i n.iois ni ;iiii oiiii()CT(, 9, да, Ч1п CK.opocTii в|)а ис;1ия 1G. isTopoii функциональный (нелнисйпыи блок) // п блок упрл лс-:нпя тиристорами 12.
Датчик тока якоря Bi.iiio.iiicu в :;пдс шупТГ1 в ciLioisoii Д1:п, а датчИК скорости враиюПИИ R виде TaxdiciiepaTOpa.
И тегриру1оиии | усилитс;1ь ;1редст;Л Ляст ЭсТе.меит сраниеии; (рактнческого тока HKOJIH Г1ГГ с TpenyeMoii величииоГ|. Одии вход - того усилнтеля иодключеи к датчику через усилитель постоянного тока, а другой через пр )граммное устройство и nepiibiii функциоиал;ный блок тнпа y f (,v) - к тахогенератор,. Выход интегрнрующего усил1 теля через ие.тинейгнзп блок нодключен к блоку уира леиил5 тиристорами инвертора. Блок управления тиристорамн может быть выиолнеи ио лк)б(ч; известной схеме.
Перв1) (jy ;1КИ11()иал1;ЛЬ 1 | блок яв.тяетсг об1)1чиь1М ииверса, 11с-,1иие1 пь,м алсмслтом с лииейпо-кусочлоГ; ааироксимаиио заданной функции. Второй фуикциона:1ьи1.1Г| блок является а1 ало1ич П)1М, но с жсс1ко з;ь лагпю характеристикой, коюрая :1;;едстав.1яет фуикщио, обратную хара1 теристи1 / /( ,/), где / -- го в деии генерагора 1. L,, --- иаиряжение на 1;лоде блока yHpaB.ieiniH тирнсторамн.
При моделироза iiiu; сл() зависи.мосIeii момента сонротир.ления от в|)емеи11 л;);)Г|;а гмиое yci poficTBo, :одер/К инее reiicpaT.;; имиул1)Сон требуемой (|)ормы и;1н лака;1Ь:11:е ycTpoiicTBO, аодк.почгются неиоС|;едстве1П1о к первому с ч1Кплш: альН()1у блоку, имокицеих и атом случае дополни
УстрО1гстз() в ne;i; дующим образ1)М.
AloMeirr па ва. тока нри иеиз.мспиом опален току якоря. Поэтому момента соП)ОТ11;;лсч111я. раз:;|1вас ioi4 генератором постоянного тока, |). ре:- лироваиик) ток;; eio яксря.
Tpe6yeMijiii со: рО1-ивлепия 1;;к якоря) иредс1 aisjHiio г функ и1еГ| ско;)остп вращеИИя arjieraia и в)емеп1. В соо1ветс:BIH1 с этим иасгргпп.аегея перввп | 1фу;1к;иг,нальньп бло1 и ;4ыбирае1ся схема yci jioiic:ва. Сигиал па з.ходе ,iiiTeij)up iOHiero усилнтеля н|)и этом н|)ед тазляет (;; ма.снпаог) ,н1 миме;: сон/стизлеН для
даниой скорости и дaнн(JГ:) мохклта зремени.
Усилеииы;; усилнтелем зос гонииого тока
сШнал рактнчсского ток;; iBvopoii з,ход
сн;нггеля 7) сравниваетея с заданным, i;
С1И1 ал их j:)acciH.iaco aHi; чс|)ез не,11 нейп1,;11
э.темент ii б.ток ира |5Л1;п1я 11,мсияет oiKj)i iтие тиристо|)оз ло тех imp. лока не хста п)вится наиря 1 ение lia зыл()Де сн.1н;елн 7. коr()pi,ii яв;1яется нптегрнр кин.нм. нто пмее: место nj)H равенспн ()акт,;нселог(; н 1;;Д;; 1;ого т;)ков. Тем самым осун1ест1. ;;статпЧ1-ЧЧ ое прозал.не. ockCHCHiiiia.-oniee :очпос1 1 оспроизвсдения 1ребуемого момента
соИ|,101Нв;1еиля.
;1агодаря весьма :4аназл1 и аиик) в элементах и алон постоянно времени интегрируюнТего уеилитсмя. (). заданного то1-:а (мо.хкмпа зонро 131зле1 ня)
ин)оисходит без суничтве1Н) динамических Horj)enjH(K refi.
Иостоя П1ая jij)e ieHH гС ин rerj.hijiCiojue; с1,тптеля уточняется н;)И насгроГн е систехп, и 1и.1бираегся 1Н ;н 1ально i5(i:-,()ii по слов11о огсутствия са мораскачнз:; Hi: н во всем Дi aнaзO le рег мироза 1н:я 1аличие з cxexie к;)л1;кс:си:) iOiiien нелинейиск.ти позво;1яет inieTi, во isceM дil,iнa ioiie ;)сгул проваиия HCUBMeniibiH с м Ma;j:ibii X)(jjHUiKHrr си.тення. ч го lU :6xoHii i,; д,-|;; I):,бора М1т; нмалы|;)го значения /С.
П ) е д i е 1 I
лсгроистзо для вое ;)o;i33c;i,eiii; i нагрузок на дзнгате,:1я. coдei)жaiiuч iciicpaTop liOCTOHHHoio ()ка, C3:i3aiiHi)iH с ;ало i;c::i,iTye iOro д1 И1ателя. и датчик )ап1. ai5iirai :н. ;ir.t:i4a f/iii.ic.-i т м. ч ; о. .: lUMBio y3e,TU4ei:H:-: luHHOjiii з:1сир ;;:взеден iiH АИ)мсч1тно-с ор(:г1 iiijix ; MOMCHTHo-HpiMCHHijix xajKiKrejiiiCTHix, oiio с(держит дaтчiii roixj якоря, два уснлите,тя, iiporpaMMiioc CT;)oiicTlu;. два (l)yiiKUiiOHa;ibHiuX 5лч)ка ikMiiHCHHiicTen H iHipiiCTOpiiijiH HHiiC ii4)p v блоком yiipaiicieННЯ. лpичe д г1чика /iKf-ря. зк,1к:ченного i5 нен1, iKop;i :чнс рат оза .)HiiH(b {, ioKa. через .lepBJjiii сил1Г1ел) ioд: :,|к)чeи к iKi вxoдoii iiTipor;) c4;iirreH4. Biopoii вход которого через программное уетро1 1етво н iiepiibiH фyнкi iк иaль;ii)Hi б,лок н ,1нне1 И(Хтей соелинсн; с дaтчiii o i корост; ispaHicnii/i, а выход через второй фуикциоиа.т1)1и, блок iK HiiKM iHocTci нодключен ;к блоку удравления тнрнсторным ниверторолг, KOTOpbiii также нодключен к якорю 1-енератора ностоянного тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1974 |
|
SU660017A1 |
| Устройство управления электропроводом летучих ножниц | 1987 |
|
SU1532209A1 |
| ПОСТОЯННОЕ ЗЛПОЛ\И НЛЮиП-.Е УСТРОПСТВО | 1972 |
|
SU328507A1 |
| Устройство для частотного управления синхронным двигателем | 1972 |
|
SU475717A1 |
| Устройство для контроля режущей способности сверл | 1983 |
|
SU1117144A2 |
| Компенсационное устройство магнетизма судна | 1988 |
|
SU1527498A1 |
| Бесколлекторный однофазный двигатель | 1955 |
|
SU103632A1 |
| Вентильный электродвигатель | 1987 |
|
SU1415347A2 |
| Механизм возвратно-поступательного перемещения | 1986 |
|
SU1415351A1 |
| Устройство измерения угла опережения впрыска топлива дизеля | 1985 |
|
SU1250688A1 |