1
Изобретение относится к области автоматики и может быть использовано в системах автоматического регулирования положением объектов, в частности для стабилизации объектов.
Известны устройства подобного назначения, в которых требования по статической и динамической точности стремятся удовлетворить введением корректирующих блоков 1.
Из известных устройств наиболее близким но технической сундности является следящий привод, содержащий первый диффереицируюний блок, блок сравнения, выход которого через предварительный усилитель соединен с первым входом сумматора, выход которого через усилитель мощности подключен к двигателю, вал которого механически соединен с валом тахогенератора и через редуктор с исиолнительным органом, выход которого подключен ко входу блока сравнения 2.
Недоетатком данного устройства является его малая динамическая точность.
Цель изобретения заключается в повышении динамической точности следящего привода.
Эта цель достигается тем, что в известный следящий нривод дополнительно введены комиаратор, второй дифференцируюп ий
блок, пороговый блок, элемент И, i: кл;оч, выход которого через нервьи дифферепиирующий блок подключен ко втором} сумматора, выход тахогенератора через последовательно соединенные второй дифференцирующий блок и Г10роговый блок иодключен к первому входу элемепта М, через компаратор - ко второму входу элемента И и, непосредственно, - к первому входу
ключа, второй н третий входы которого соединены еоответственно с выходами уснлнтеля мощности и элемента И.
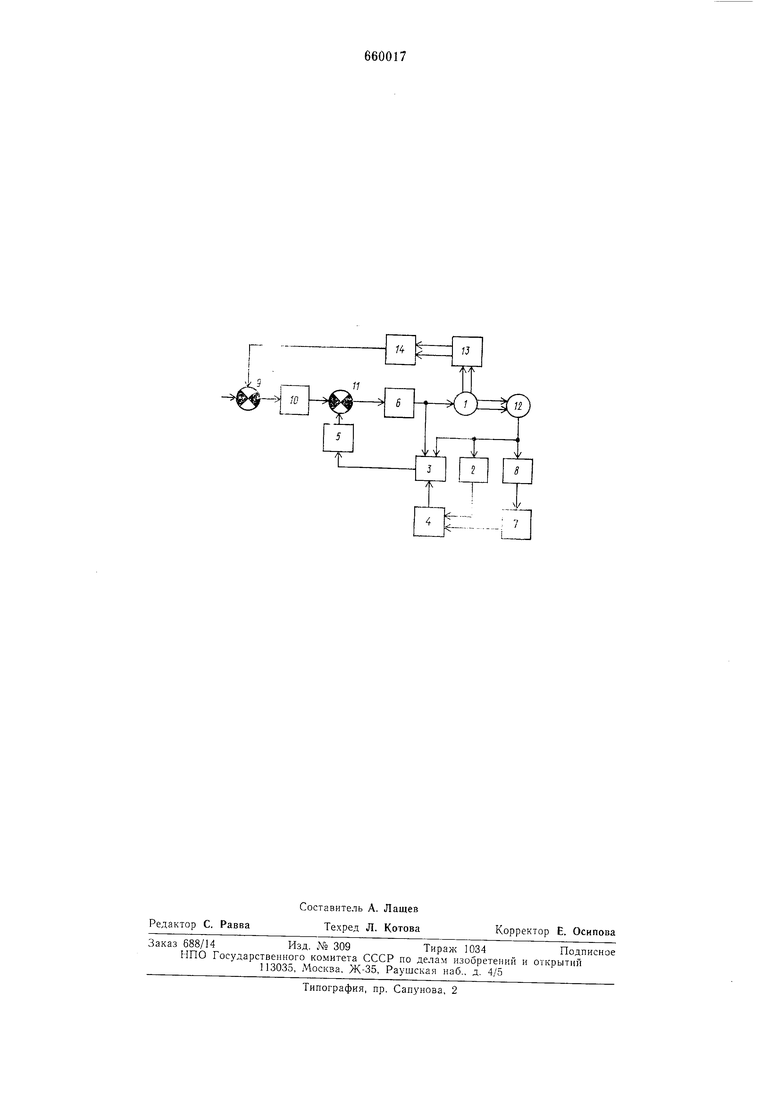
Ма чертеже представлена структурная схема следящего привода, содержаитего
двигатель I, комнаратор 2, ключ 3, элемент И 4, первый дифференцирующи блок 5, усилитель мощности 6, пороговый блок 7, второй дифференцирующий блок 8, блок сравпення 9, предварительный силитель 10,
сумматор И, тахогеиератор 12, редуктор 13 и иеполнительный орган 14.
Сущноеть нредложенного привода заключаетея в том, что гибкая обратиая связь осуществляется по нанряжению управления
двигателем нлн по скоростп двигателя в зависи -.:ости от величины и ускорения двигателя.
Основным режимом следящего привода часто является гармонический с частотой и
амплитудой, 1 зменяющимися в ограннчен3
iiOM диапазоне. С ледовательно, иа)яду со с га1 iiiccKoii ouiiiOKo; будет прпс) ul iiuiia ; и динамическая еостан.чя1О1ц;:я е чаиги; ;.. гармоиичеекого режима. Ввел.счыел; i ;Гич;;п обратной енязи ио зы.ходх еилше.)но уменьшить обе еое 1а;5ляк)11ле tuanf допусги.мых величии.
, иаличие заиаздыва11И1: и i уеилителя вызывает большой ,1 пульс ошибки к момеиг 113 еиепия . )сти ()евере). i. е. ири а:5ме111ТЛ и знака момента 1)ення. Величина :)то;(.) имиулоеа завиеиг от заиазды1 аиия, каоаметрон гармонического режима и .момента i-neiuni и, как иравило, во много jjaa лр1ТГ: лиае; мaкeимa, зиаче11;е e-..M.Mainioi: (дигм. .мичееко ; и статической) 01ниб1 н. ;,ля иеключеиия иоявлеиия импульса ошибки и;; реверсе иред;1агаетея отключать ni6K lo {) сьяз) ио выход еплите/1Я иа ми ieii; )ждеиня еко)()е;и 4Cj)e: iio/i:, а ;одклк)ча1и на что зремя гибкук. uilpaH iu iio скорое Н Д:И1га;еля. Э|() иек,::Оча ei .- аиаздьп;ание п)и обработке екачк;; Meiiia ири еохранеинн 15ыеокой е1атичеекоа и динамической точноеп: еие;ем1)1. Ноекол, ко обычно полоса K() гибкой (:б) иои сзяз;: И1ире иолоси иропхекання vaicu-vbi. liiri ерзал )1Ме1Л1, и 1ЧЧст:ие ixOlu;);; ч; чается связь ио скоросы може: бвпт, зы браи меИ1)1ие, чем иос1оянн1и. вр;М;пи зам киутой систем 1)1. Это |;()зиолит cк( lu i;ei; рова IT) скачок лЮмеита на двигаге-ле а lic к;1 очи1Ь влияние таких факторов, . . av .TiiaeiuH MOMeina об)агК11 и sMeiibHieiiae го етояшкл ij)eMeHH ко.чгба i вепа о иежесл Koei и коне рхлчции, коюрьк- cKa.ii.i 15аю Ч-я в .амки 1О|| еистеме е 1Н)Д1)би()Г :{ рапюй свя;1вю.
Vei pejiicTHo рабо1ает елед. образом.
В установнвн смся га.рмоиическом ;)ежимс ирн скорости двнгаге.тк 1, от.шчиой о; иуля. иа 1И.1ХОДС комнарато К1 2 си1на..1 о:еутствует, унравлякминл е1лл1ал на ключ :5 с ул1смента 11 4 не иодаетея, и вх;;д aiepiioro диффереицируклнего блока 5 1К)дкл:очен к ВЫХОД)- усилителя мониюсти (. Устройство работас как обвнчиая енетема е : гбкой олрицателвной oepaTi-oii евя.лао но 11ааряжеHHIO унравлеиия двнгатс-лем .
При иодходе CKOpociTi двигагс-л;,- i . в гармоническо.; режиме уееко;.).Ч1ие ири чтом иринимает макснмал;)НОс аначшис; срабатв1васт ко.миаратор 2 и иорогоный блок 7, выдаюни-1Й сигнал ири наличии уе-корення со второг(5 диффеиеинар к;иито блока 8, нревыи1а1ОИ1е1Ч) иекотор); макенмалвиый уровсив, за1И1сяииш от иараметров рабочего рсжн.ма. Кон1 К)Л1. пе/прпшы уекор(ЧИ1Я необходим .т,ля ьчлч.пюч.тия вочMO KiiOf Tn иереключення обратной евячи
днижеи11ЯХ е Aia.iOH (Лчоросмло ос:; ,}i-i,vT;va, при илаашлх осипюиках.
iaiiiuuTbi I. KtiMiiapaiopa 2 л Hopoi oiioiaj блс) 7 3bribiisaioi иоя глеиие сигнала с аЛ;л:н;а 1 и лереключеиис к.чюча о, ;i резулгiaie iei(; при иодходе к нулю екороечт; В1 л;очае ея 1абкая об)атиая связь lio )С1и н нск.тючается (;шибк1Н ДлиКЛьиость включения -лок евязи онредг,;;. е;ея длнгслыюс ью нмиу.1ьса. сфо)мнровашкич) на ((ыходе комнараюра, и не должна иревышатл ноетоянно времени замкн -юй системы.
Ири необходимости coxpaiieaHsi частотно; харакге)истикт системы в :ом интерва.1е времени можно оеуи;ес Т5Л л з доаолнн1е. лереключеиия в iie)BOro диффереиин) 1ои;е о бгюка о. По око1 чании ами льеа е колЛ1ара iO)a 2 (иосле лрс.)хо 1чдення н левси eKopoeiiij нронада1-; (ллиал е :).1чМ1. а И 4, и ключ 3tjjBi)aH;;,..; еис1Чл;у к нервоначалышй структуре.
1с;;ол1,-;озанне нзо6ретен11я 11озь(;.;яе г lic:члючиг:; имаульеные измене1л;я ошиоки .;i)a jJCBipce и гем самым во много раз но1 1ЛсичЧ) динам нчесгл К) lOaiiocTi.. системы.
;,ледяии1н привод, содержа11и1и лервын д;|(1)ференцН :)К- 1и111 блок, блок сравнеиия. выход коюрого через нредваритс.тыил сиЛ1гиль соедине с первым входом гора. :)ыход коюрслч; через силнтель монин)cii: ;1одкл (i4vH к Д:}нга1 е.ло, ва,; )ог(/ :.; а И;|скн епедги Н е ва.Юл: iaxoieiiej)a .kija и aepc.i е иеаолии )1м up., ьыхол, K(j:(jpoi4) нодключен К1) ихо;;. б,И;ка );ня, о ; л 1 ч а KJ Ui, ii и с я тем, ч;чз, е де, повышения динамической 1ючИС|С1И н)нвода, oji еодержит комнаратор, | горой диффереидирующн блок, иороговый б.ток, злемснт I-i и к.тюч, вьгход котО)(.)го через иервы ; днфференцнруюи1ий блок иодключеи ко вюромх входу сумматора, зыход тахоггнераюра через и(.)е;1едоватслвно соединенные вт(;рой дифференцируюигий бл(л н иоро; овьи б,ток иодктиочен к Hepiioм входу элемента Н, через комна)атор ко второмх 15ход - элемента 11 н, не(;сред) cTBcHiio, к нервому входу ключа, второй а третий входы г.оторого еоед1;1нч1Ы cocjiзе re:4U4iHi; ; выходамн еи,11меля Я ОН1НОети н элемента 11.
Неючннхи И1н)орман,;п:,
ириня;)Н 3ei ьиимаиис лри укс1Иртизе
1.Зай;тев Г. Ф. (интез с,тедяии х систем )и 1еокой точное и. Киев, «Техиика 971 ,-л.1,§ 1.
2.Бееек --рскнй К. Л. и др. Проектнроваине слсдяни х сл с;чм ма,;ой мощности. Л., -кСлДнрОл:, 1Q58, IM. 12.
Г
Ь
х
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифро-аналоговая следящая система | 1974 |
|
SU613290A1 |
| ВСЕСОЮЗНАЯ IПАШТ1ШЧЕХ(^^^'=НП:{АШ БИБЛИОТа.Ч.^^ I | 1972 |
|
SU349515A1 |
| Привод ориентации шпинделя металлорежущего станка | 1984 |
|
SU1241194A1 |
| Устройство для комбинированного числового программного управления | 1980 |
|
SU911469A2 |
| Устройство для моделирования отбора частот радиопередающих станций | 1975 |
|
SU660080A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU333535A1 |
| Устройство для совмещения растров цветной передающей телевизионной камеры | 1975 |
|
SU558419A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU409193A1 |
| БЛИОТЕКА I | 1971 |
|
SU317015A1 |
| Нелинейное корректирующее устройство | 1982 |
|
SU1023275A1 |