Изобретение относится к области весоизмерительной техники.
Известны способы взвешивания движущегося транспорта путем временного усреднения сигнала весоизмерительных датчиков.
Эти способы не устраняют влияния динамической помехи на результат взвешивания.
Предлагаемый способ отличается от известных тем, что сигнал динамической помехи выделяют из сигнала весоизмерительных датчиков, складывают с эталонным сигналом, полученную сумму измеряют такое же количество раз и в те же моменты времени, что и сгинал с весоизмерительных датчиков, результаты многократных измерений суммируют и усредняют, затем из усредненного значения суммы динамической помехи и эталонного сигнала вычитают эталонный сигнал, а полученную разность вычитают из усредненного значения сигнала весоизмерительных датчиков.
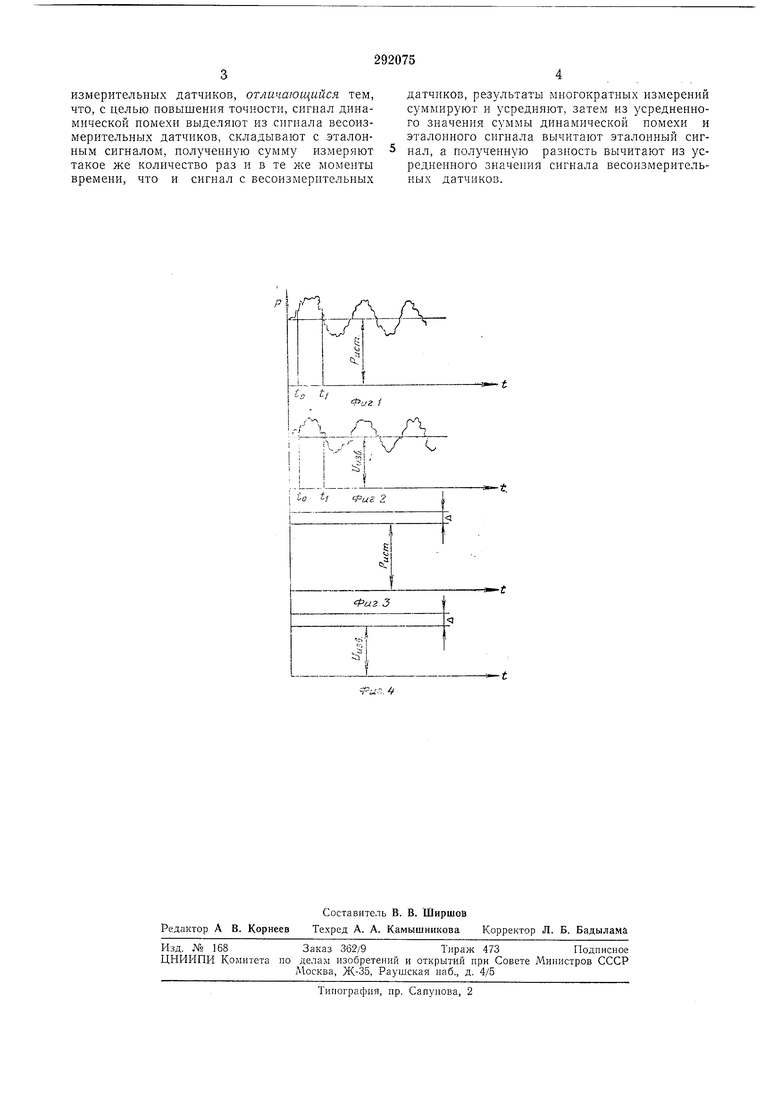
На фиг. 1-4 показаны графики, поясняющие описываемый способ.
Из сигнала весоизмерительных датчиков, показанного на фиг. 1, выделяют динамическую помеху, например, с помош,ью трансформатора.
нала и динамической поме.чи (см. фиг. 2).
В результате многократных измерении с последуюш,им усреднением получают сигнал. представляюш.ий собой сумму истинного веса
движущегося объекта и . возникшей изза наличия динамической составляющей (см. фиг. 3).
Аналогичным образом в результате усреднения суммы известного сигнала и дипамической помехи получают сигнал, показанный па фиг. 4.
Из усредненного значения суммы известного сигнала и динамической помехи вычитают известный спгнал, получая усреднеппсе зн;г.:ение
динамической помехи, которое гычитают из усредненного значения сигнала весоизмерительных датчиков. В результате получают истинный вес объекта.
Использование эталонного (известного) сигнала связано с необходимостью преобразования разнополярных и многократно отличающихся по величине полезного сигнала и помехи.
Описываемый способ позволяет значительно
повысить точность взвешивання быстродвил ущихся объектов.
измерительных датчиков, отличающийся тем, что, с целью повышения точности, сигнал динамической помехи выделяют из сигнала весоизмерительных датчиков, складывают с эталонным сигналом, полученную сумму измеряют такое же количество раз и в те же моменты времени, что и сигнал с весоизмерительных
датчиков, результаты многократных измерении суммируют и усредняют, затем из усредненного значения суммы динамической помехи и эталонного сигнала вычитают эталонный сигнал, а полученную разность вычитают из усредненного значения сигнала весоизмерительных датчиков.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ВЗВЕШИВАНИЯ БЫСТРОДВИЖУШИХСЯОБЪЕКТОВ | 1971 |
|
SU289299A1 |
| Способ взвешивания движущихся объектов | 1990 |
|
SU1800269A1 |
| Весоизмерительное устройство | 1988 |
|
SU1578497A1 |
| Способ поосного взвешивания железнодорожных вагонов в движении | 1989 |
|
SU1749719A1 |
| Способ динамического взвешивания | 1983 |
|
SU1177683A1 |
| Устройство для взвешивания подвижных объектов | 1987 |
|
SU1432341A1 |
| МАССОМЕТРИЧЕСКИЙ СПОСОБ ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2334955C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА | 1997 |
|
RU2122184C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2006886C1 |
| КРАНОВЫЕ ВЕСЫ | 1971 |
|
SU301555A1 |
-t
