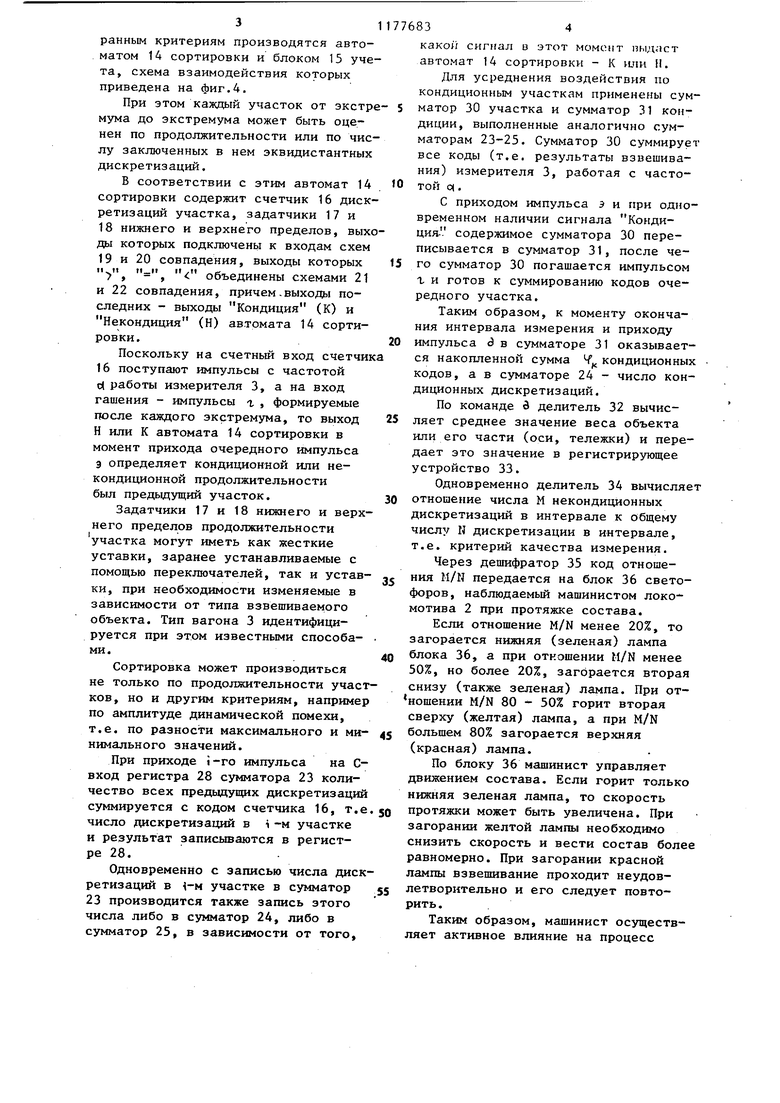
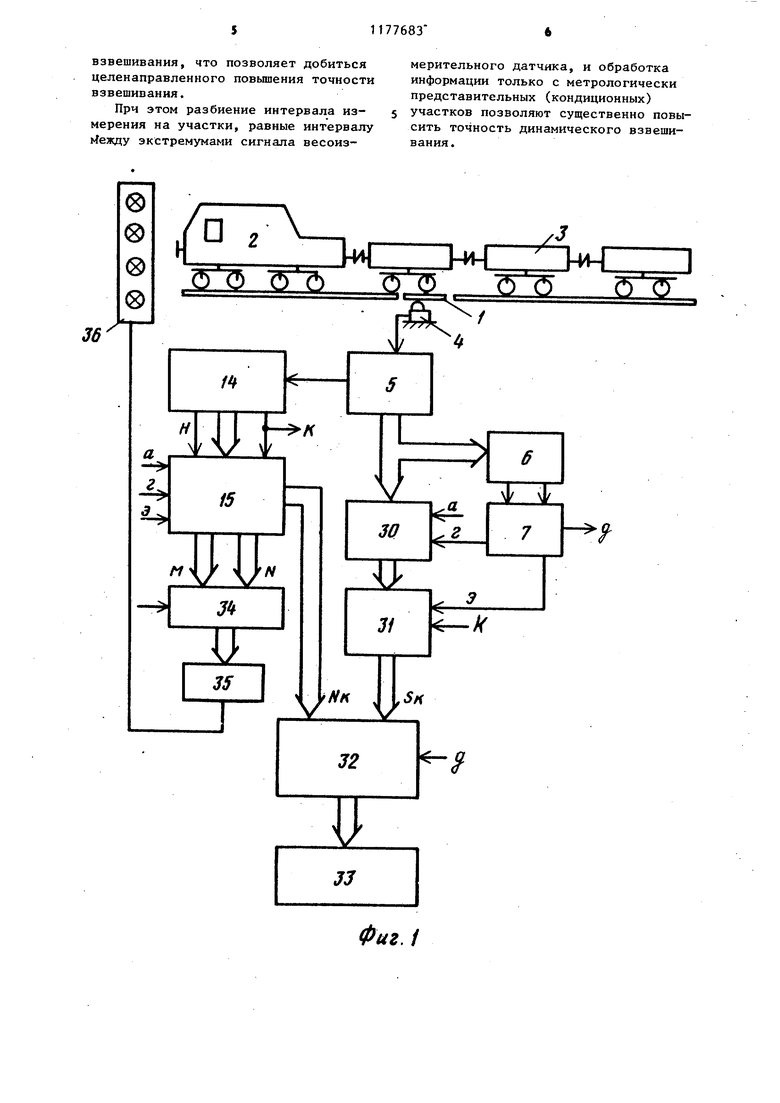
Изобретение относится к весоизмерительной технике и может быть применено в народном хозяйстве,.в том числе для взвешивания грузов в движении на повышенных скоростях в условиях действия нестационарных возмущающих воздействий, обусловленных неравномерностью движения состава, неровностей пути или действием сцепок. Целью изобретения является повышение точности измерения за счет учета влияния нестационарных возмущающих воздействий. Сущность способа заключается в том, что при перемещении ; объекта по весам с заданной скоростью предва рительно оценивают степень влияния н стационарных помех на результат изме рения. При этом в случае получения удовлетворительной оценки производят определения веса объекта или его части путем усреднения измеренных усилий, действующих на интервалах времени, в которых помеха оказывает наименьшее воздействие, т.е. на метрологически представительных (кондиционных) участках процесса измерения а в случае получения неудйвдетворительной оценки о степени влияния помехи - изменяют скорость перемещения объекта по весам и повторяют процесс измерения. На фиг. 1 изображена блок-схема устройства, реализующего предлагаемы способ; на фиг.2 - временные диаграм мы, поясняющие способ; на фиг. 3 и 4 примеры выполнения отдельных блоков устройства. Устройство содержит весовую платформу 1, локомотив 2, вагоны 3, в ко торых размещается взвешиваемый груз, весоизмерительный датчик 4, измеритель 5, блок 6 определения экстремумов, бЛок 7 управления (фиг. 3), дат чик 8 интервала измерения, триггер 9 начала измерения,.первую схему 10 спвпадения, первый одновибратор 11, вторую схему 12 совпадения, второй одновибратор 13, автомат 14 сортиров ки отдельных интервалов (участков) процесса измерения, блок 15 учета, счетчик 16 дискретизаций участков из мерения, задатчики 17 и 18 нижнего и верхнего пределов, третью, четвертую, пятую и шестую схемы 19-22 совпадения. 11 32 При этом блок 15 учета (фиг. 4) может состоять из сумматора 23 дискретизаций интервала, сумматора 24 кондиционных дискретизаций и сумматора 25 некондиционных дискретизаций. В состав каждого сумматора 23 - 25 входят сумматоры 26 и 27, а также регистр 28, при этом сумматоры 24 и 25 имеют схему 29 совпадения. Кроме этого, в состав устройства входят сумматоры 30 и 31, выполненные аналогично сумматорам 23 - 25, первый делитель 32, регистрирующее устройство 33, второй делитель 34, дешифратор 35 и блок 36 светофоров. Устройство работает следующим образом. При перемещении по весовой платформе 1 с помощью локомотива 2 вагонов 3 на выходе весоизмерительного датчика 4 появляется сигнал, которьй поступает на измеритель 5, производящий постоянное или дискретное измерение выходного сигнала. Типичный вид выходного сигнала датчика 4 показан на фиг. 2 (кривая 1). Экстремумы выходного сигнала датчика 4 находятся блоком 6 (позиция э на фиг. 2) . Разбиение интервала измерения на участки, ограниченные экстремумами, производится блоком 7 управления (фиг.З). Датчик 8 интервала измерения срабатывает в момент времени t когда измеряемый объект как его часть находится на платформе 1 (продолжительность интервала измерения показана на фиг. 2, 11), при этом триггер 9 начала измерения, С-вход которого соединен с выходом макс блока 6,формирует импульс 111 (фиг.2). Благодаря работе схемы 10 совпадения, открываемой указанным импульсом, импульсы начинают поступать на другие блоки устройства, чем обеспечивается измерение, начиная с момента времени t- , т.е. с первого максимума выходного воздействия. Через некоторое время после каждого импульса j благодаря работе одновибратора 11 и схемы 12 совпадения формируется импульс гашения (позиция г на фиг.2). По отпускании датчика 8 интервала одновибратором 13 формируется управляющий импульс Э- деление. Оценка воздействия по каждому участку и сортировка оценок по выб3ранным критериям производятся автоматом 14 сортировки и блоком 15 уче та, схема взаимодействия которых приведена на фиг.4. При этом каждый участок от экстр мума до экстремума может быть оценен по продолжительности или по чис лу заключенных в нем эквидистантных дискретизаций. В соответствии с этим автомат 14 сортировки содержит счетчик 16 диск ретизаций участка, задатчики 17 и 18нижнего и верхнего пределов, вых ды которых подключены к входам схем 19и 20 совпадения, выходы которых , , объединены схемами 21 и 22 совпадения, причем.выходы последних - выходы Кондиция (К) и Некондиция (Н) автомата 14 сортировки. Поскольку на счетный вход счетчи 16 поступают импульсы с частотой с( работы измерителя 3, а на вход гашения - импульсы i , формируемые после каждого экстремума, то выход Н или К автомата 14 сортировки в момент прихода очередного импульса э определяет кондиционной или некондиционной продолжительности был предыдущий участок. Задатчики 17 и 18 нижнего и верх него пределов продолжительности участка могут иметь как жесткие уставки, заранее устанавливаемые с помощью переключателей, так и устав ки, при необходимости изменяемые в зависимости от типа взвешиваемого объекта. Тип вагона 3 идентифицируется при этом известными способами. Сортировка может производиться не только по продолжительности учас ков, но и другим критериям, наприме по амплитуде динамической помехи, т.е. по разности максимального и минимального значений. При приходе i-ro импульса на Свкод регистра 28 сумматора 23 количество всех предыдущих дискретизаций суммируется с кодом счетчика 16, т.е число дискретизаций в i-м участке и результат записываются в регистре 28. Одновремекно с записью числа диск ретизаций в м участке в сумматор 23 производится также запись этого числа либо в сумматор 24, либо в сумматор 25, в зависимости от того. 83 какой сигнал в этот момопт пыд.чст автомат 14 сортировки - К miH II. Для усреднения возде11ствия по кондиционным участкам применены сумматор 30 участка и сумматор 31 кондиции, выполненные аналогично сумматорам 23-25. Сумматор 30 суммирует все коды (т.е. результаты взвешивания) измерителя 3, работая с частотой сх. С приходом импульса э и при одновременном наличии сигнала Кондиция- содержимое сумматора 30 переписывается в сумматор 31, после чего сумматор 30 погашается импульсом г и готов к суммированию кодов очередного участка. Таким образом, к моменту окончания интервала измерения и приходу импульса d в сумматоре 31 оказывается накопленной сумма кондиционных . кодов, а в сумматоре 24 - число кондиционных дискретизаций. По команде д делитель 32 вычисляет среднее значение веса объекта или его части (оси, тележки) и передает это значение в регистрирующее устройство 33. Одновременно делитель 34 вычисляет отношение числа М некондиционных дискретизаций в интервале к общему числу N дискретизации в интервале, т.е. критерий качества измерения. Через дешифратор 35 код отношения M/N передается на блок 36 светофоров, наблюдаемый машинистом локомотива 2 при протяжке состава. Если отношение M/N менее 20%, то загорается нижняя (зеленая) лампа блока 36, а при отношении M/N менее 50%, но более 20%, загорается вторая снизу (также зеленая) лампа. При отношении M/N 80 - 50% горит вторая сверху (желтая) лампа, а при M/N большем 80% загорается верхняя (красная) лампа. По блоку 36 машинист управляет движением состава. Если горит только нижняя зеленая лампа, то скорость протяжки может быть увеличена. При загорании желтой необходимо снизить скорость и вести состав более равномерно. При загорании красной лампы взвешивание проходит неудовлетворительно и его следует повторить . Таким образом, машинист осуществляет активное влияние на процесс
взвешивания, что позволяет добиться целенаправленного повышения точности взвешивания.
При этом разбиение интервала измерения на участки, равные интервалу 1 1ежду экстремумами сигнала весоизмерительного датчика, и обработка информации только с метрологически представительных (кондиционных) участков позволяют существенно повысить точность динамического взвешивания.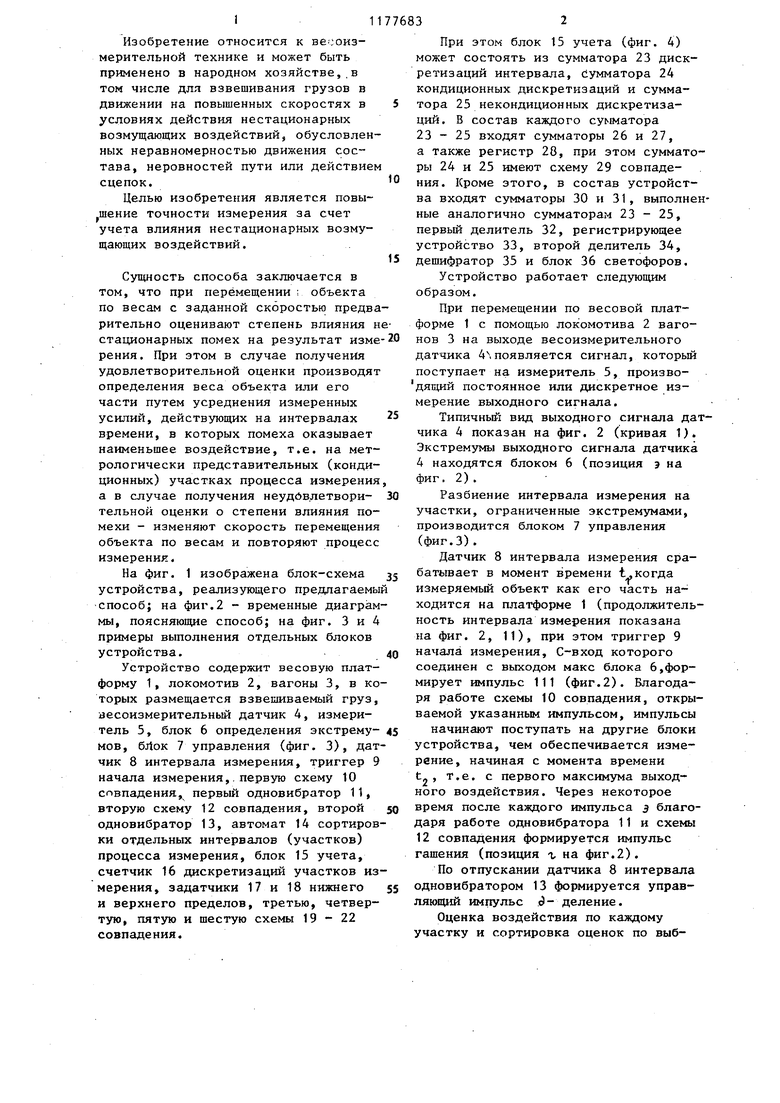
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для динамического взвешивания | 1983 |
|
SU1137330A1 |
| Устройство для поосного взвешивания железнодорожного состава в движении | 1984 |
|
SU1229586A1 |
| Способ взвешивания движущихся объектов | 1990 |
|
SU1732175A1 |
| Устройство для взвешивания железнодорожных вагонов в движении | 1987 |
|
SU1474475A1 |
| Способ взвешивания движущихся объектов | 1990 |
|
SU1800269A1 |
| Способ поосного взвешивания железнодорожных вагонов в движении | 1989 |
|
SU1749719A1 |
| Устройство для взвешивания движущихся объектов | 1990 |
|
SU1789877A1 |
| Устройство для взвешивания движущихся объектов | 1989 |
|
SU1700382A1 |
| Устройство для взвешивания движущихсяТРАНСпОРТНыХ СРЕдСТВ | 1979 |
|
SU853410A1 |
| Весоизмерительное устройство | 1981 |
|
SU972245A1 |
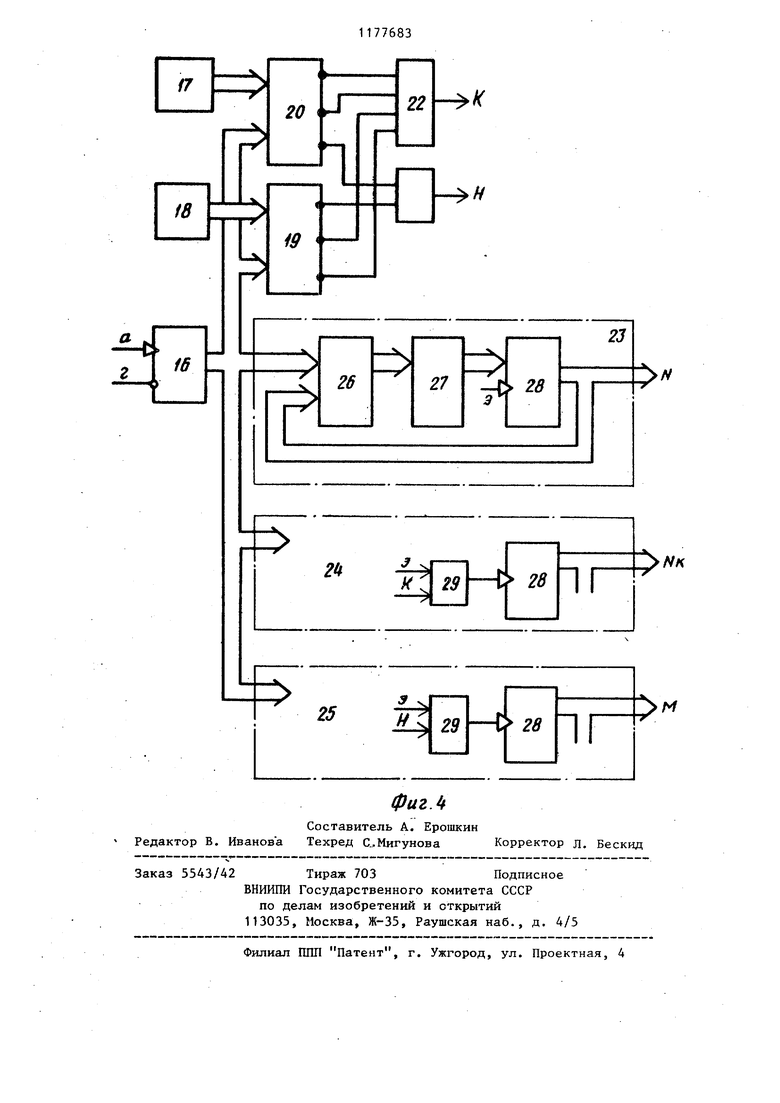
СПОСОБ ДИНАМИЧЕСКОГО ВЗВЕШИВАНИЯ, состоящий в перемещений объекта по весам, измерении в текущие моменты времени усилий, действующих на весоизмерительный преобразователь, и определении моментов времени, в которые усилия, действующие на преобразователь, имеют экстремальные значения, отличающийся тем, что,с целью повышения точности измерения за счет учета влияния нестационарных возмущающих воздействий, задают скорость перемещения объекта, допустимые пределы интервала времени между экстремумами усилий, действующих на весоизмерительный преобразователь, определяют количество интервалов времени между экстремумами, продолжительность которых находится в допустимых пределах, и количество интервалов времени между экстремумами, продолжительность которых выходит за допустимые пределы, определяют отношение количества интервалов, вьппедши-х за допустимые пределы, к общему количеству интерi валов между экстремумами и в случае получения указанного отношения по СЛ величине, не выходящей за заданный С предел, определяют вес объекта или его части путем усреднения измеренных усилий, действующих на интервалах времени, продолжительность которых находится в заданных пределах, в противном случае - изменяют ч скорость перемещения объекта по весам и повторяют процесс измерения. о 00 со
Фиг.1
3
jjIL
JjI I r
Фиг.г
фиг.З
гг
20 4
г
t8 Z I-ГТ /
16
26
2U
22
И
23
У
27
тС
28
/VK
-Ч
Я
/С
| Способ взвешивания движущихся объектов | 1973 |
|
SU460451A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для взвешивания транспортных средств | 1974 |
|
SU491042A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
