Изобретение относится к весоизмерительным способам и может быть использовано, например, для определения веса транспортных средств.
Известен способ поколесного взвешивания подвижных объектов (а.с. СССР N 1372194 от 07.02.88, G 01 G 19/04), включающий следующие операции: установку на железнодорожном пути грузоприемных блоков; преобразование входного сигнала грузоприемных блоков в цифровые коды; фильтрацию цифровых кодов; суммирование результатов обработки.
Известен способ взвешивания объектов (заявка ЕПВ 0500971 от 02.09.92, G 01 G 19/04), в котором вес груза определяется суммированием измерительных сигналов силовых датчиков. Для повышения точности взвешивания используются поправочные и корректирующие коэффициенты.
Известен способ взвешивания движущихся объектов (а.с. СССР N 1789877 от 23.01.93, G 01 G 19/03), в котором сигнал с датчика веса фильтруют аналоговым фильтром напряжение-частота с целью ограничения полосы частот шумов и помех. Определяют все параметры существующих колебаний в тренде измерительного сигнала, автоматически компенсируют их и по очищенному сигналу путем усреднения получают значение веса объекта.
Известен способ контроля массы груза (а.с. СССР N 1550328 от 15.03.90, G 01 G 19/08), в котором используют информацию о динамике предрессорной массы транспортного средства в момент загрузки. Процесс затухания колебаний предрессорной массы, вызванных загрузкой, определяется рабочими характеристиками рессор.
Способ по а.с. СССР N 1550328, принятый за прототип, включает в себя, в частности, следующие операции: выполняют заданное число измерений первого и второго параметров сигнала датчика массы груза, заполняют их, определяют среднее значение параметров, умножают их на предварительно заданный нормировочный коэффициент, суммируют полученные результаты измерений показаний датчиков, соответствующих одной оси транспортного средства, суммируют полученные данные по всем осям транспортного средства для определения его массы, причем для повышения достоверности контроля массы груза вычисляют производную значения показаний датчиков, сравнивают ее величину с заранее заданным значением.
Известные способы определения веса недостаточно точки, т.к. динамическая составляющая помеха практически всегда присутствует в сигналах измерительного датчика в виде нескольких переменных составляющих с различными параметрами из-за колебаний объекта измерения по нескольким степеням свободы.
Технической задачей изобретения является повышение точности определения веса.
С этой целью в качестве грузоподъемного блока используют гидравлический подъемник, в качестве измерительного датчика - датчик давления, в качестве корректирующих параметров - заранее заданные градуировочные характеристики. Для определения веса транспортного средства выполняют заданное число измерений первичных сигналов датчика давления, запоминают их, определяют среднее значение, умножают их на нормировочные коэффициенты, вычисляют производную значений показаний датчика давления, суммируют полученные результаты для определения веса транспортного средства, причем вес каждого колеса транспортного средства определяют в момент отрыва колеса от опоры с учетом времени на завершение переходных процессов в измерительной системы, гидросистеме и подвеске колеса, вычисление производной значения показаний датчика давления производят по усредненным значениям. Момент отрыва колеса от опоры принимают соответствующим моменту, когда значение производной сигнала датчика давления становится близким к нулю.
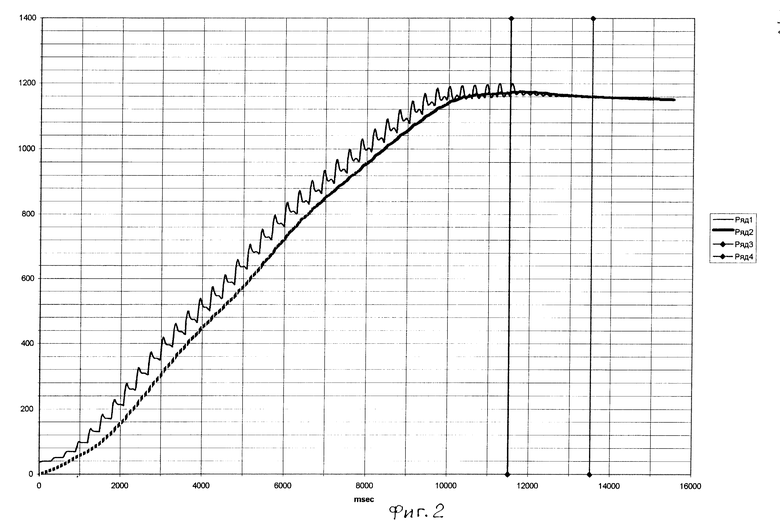
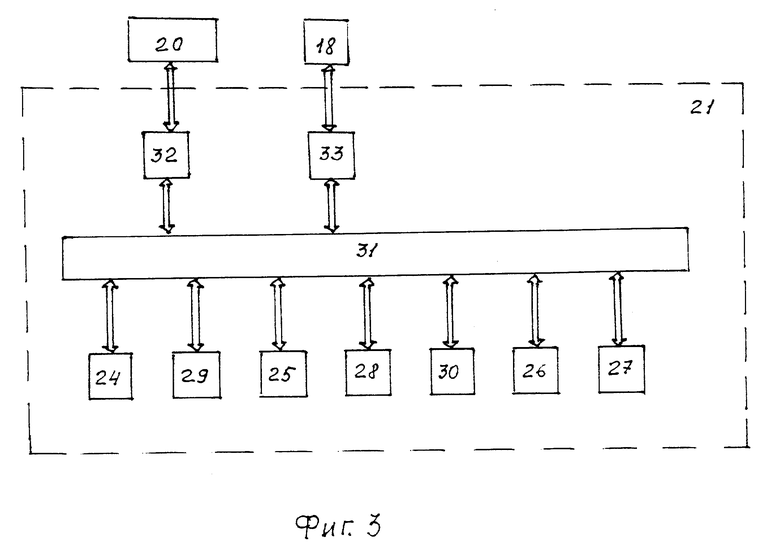
На фиг. 1 представлена блочно-кинематическая схема устройства для реализации способа; на фиг. 2 - график, поясняющий способ определения веса транспортного средства; на фиг. 3 - структурная схема микропроцессорного вычислительного устройства.
На фиг. 1 показаны вагонное колесо 1, рама 2 со стяжным устройством 3, рельс 4, упорный подпятник 5, силовой подпятник 6 с поршнем 7 со штоком и камерой 8 давления, датчик 9 давления, гидронасос 11, редуктор 12, предохранительный и стравливающий клапаны 13, электродвигатель 14, преобразователь 10 давление-напряжение, измерительный блок 1, в состав которого входят усилитель 16, мультиплексор 17, АЦП 18, согласующее устройство 16, блок 20 индикации, микропроцессорное устройство 21, блок 22 управления, блок 23 питания.
На фиг. 3 показаны первое ОЗУ 24, первое ПЗУ 25, процессор 26, накопитель 27, второе ПЗУ 28, второе ПЗУ 29, третье ПЗУ 30, шины 31, интерфейс 32 регистрации, интерфейс 33 ввода-вывода.
Гидроподъемник предназначен для подъема колеса 1 вагона до отрыва его от рельса 4. Массу колеса 1 определяют в момент отрыва колеса 1 вагона от рельса 4. Момент отрыва колеса от рельса определяют измерительным блоком 15.
Принцип измерения массы груза основан на измерении давления датчиком 9 в рабочей полости силового подпятника 5 - камере 8 давления.
Для определения массы груза производят поочередное определение массы всех колес вагона и суммирование результатов взвешивания.
Способ реализуется следующим образом.
Гидроподъемник устанавливают под колесом 1 на рельс железнодорожного пути. Упорный подпятник 5 и силовой подпятник 6 устанавливают на рельс 4 соответственно с левой и правой стороны колеса 1. При помощи стяжного устройства, обхватывающего колесо 1, поджимают подпятник 5 и 6 к колесу 1. В момент включения электродвигателя 14 привода гидронасоса 11 в камере 8 давления создается давление P, которое через поршень 7 воздействует на колесо 1 вагона. Датчик 9 давления формирует сигналы давления, которые преобразуются в напряжение преобразователем 10 и поступают на усилитель 16, а затем через мультиплексор 17 и АЦП 18 поступают на второй вход микропроцессорного вычислительного устройства (МВУ) 21 и через шины 31 и интерфейс 33 заносится в первое ОЗУ 24. Блок 22 управления выдает команду ЗАМЕР на первый вход МВУ 21, которое начинает выполнять программу, заложенную в ПЗУ 25. Производная параметров датчика 9 давления (фиг. 2) вычисляется процессором 26 по усредненным значениям. Выполняют заданное количество измерений сигналов датчика 9 давления, которое выводится на блок 20 индикации через интерфейс 32 регистрации. Результаты измерения накапливаются в накопителе 27 в виде массива данных, после чего процессор 26 вычисляет производную накопленного ряда значений. Вычисление производной производится процессором 26 до тех пор, пока ее значение не станет меньше установленного порогового уровня, хранящегося во втором ПЗУ 28, после чего блок 22 управления выдает команду ОТКЛЮЧЕНИЕ ЭЛЕКТРОДВИГАТЕЛЯ 14, которая через согласующее устройство 19 поступает на вход электродвигателя 14. Через определенное время после отключения электродвигателя (примерно, 2с), необходимое для завершения переходных процессов в измерительной системе, гидросистеме и подвеске колеса, блоком 20 индикации фиксируется значение давления, поступающее от датчика 9 давления. В первом ОЗУ 24 накапливается n значений давления, которое усредняется. Значения градуировочных характеристик, хранящиеся в ПЗУ 30, в момент времени, определенный программой, используются для корректировки веса по измеренному давлению в момент отключения электродвигателя. Градуировочные характеристики представляют собой соотношения давления в камере гидросистемы, снимаемого с выхода датчика 9 давления и сигналов АЦП 18.
Блок 22 управления выдает команду ВЫЧИСЛЕНИЕ процессору 26. Откорректированное значение веса колеса 1 заносится в ОЗУ 29. Аналогичным образом измеряется вес всех колес вагона. Значение веса колес суммируют для определения веса транспортного средства и это значение веса заносится (выдается) на блок 20 индикации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 1997 |
|
RU2116630C1 |
| ПОРТАТИВНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2345330C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО ДАВЛЕНИЯ ОДИНОЧНОЙ ПОДВИЖНОЙ НАГРУЗКИ НА ПРОЕЗЖУЮ ЧАСТЬ АВТОДОРОЖНЫХ МОСТОВ | 2010 |
|
RU2529669C2 |
| Способ и устройство для определения расположения центра тяжести груженого железнодорожного вагона | 2021 |
|
RU2784784C1 |
| ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ДВИЖУЩИХСЯ ВАГОНОВ | 1996 |
|
RU2115894C1 |
| СПОСОБ ПОВЕРКИ ВЕСОВ | 2004 |
|
RU2278359C2 |
| Система взвешивания вагонов подвижного железнодорожного состава с использованием волоконно-оптических датчиков давления | 2023 |
|
RU2817644C1 |
| Способ взвешивания подвижных объектов | 1986 |
|
SU1453179A1 |
| Способ оценки массы транспортного средства с электроприводом постоянного тока | 2016 |
|
RU2620898C1 |
| Способ поколесного взвешивания подвижных объектов | 1990 |
|
SU1781553A1 |
Способ предназначен для определения веса транспортных средств. При определении веса выполняют заданное число измерений первичных сигналов, запоминают их, умножают их на предварительно заданные нормировочные коэффициенты, вычисляют производную значения показаний этих сигналов и суммируют результаты. В качестве первичных сигналов используют сигналы датчика давления. Вес объекта определяют в момент отрыва объекта от споры с учетом времени, необходимого на завершение переходных процессов в измерительной системе и объекте измерения. Момент отрыва объекта от опоры принимают соответствующим моменту, когда значение производной сигнала датчика давления становится близким к нулю. Вычисление производной производят по усредненным значениям сигналов, а в качестве нормировочных коэффициентов используют градировочные характеристики. Техническим результатом является повышение точности определения веса. 3 ил.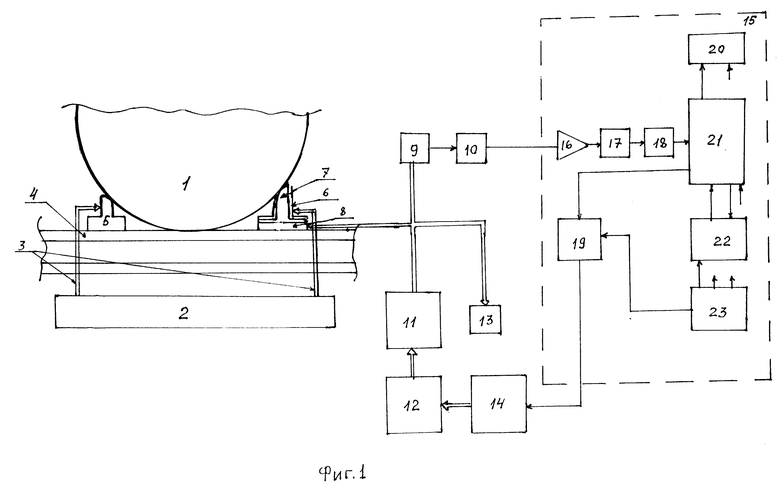
Способ определения веса, включающий выполнение заданного числа измерений первичных сигналов, запоминание их, определение среднего значения, умножение их на предварительно заданные нормировочные коэффициенты, вычисление производной значения показаний первичных сигналов, суммирование полученных результатов, отличающийся тем, что в качестве первичных сигналов используют сигналы датчика давления в рабочей полости гидроподъемника, причем вес каждого объекта определяют в момент отрыва объекта от опоры с учетом времени, необходимого на завершение переходных процессов в измерительной системе и объекте измерения, момент отрыва объекта от опоры принимают соответствующим моменту, когда значение производной сигнала датчика давления становится близким к нулю, вычисление производной значения показаний первичных сигналов производят по усредненным значениям, а в качестве нормировочных коэффициентов используют значения градуировочных характеристик.
| Способ контроля массы груза и устройство для его осуществления | 1988 |
|
SU1550328A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ АВТОТРАНСПОРТА | 1992 |
|
RU2041448C1 |
| Устройство для взвешивания груза в кузове автосамосвала | 1987 |
|
SU1464045A1 |
| US 4630227 A, 16.12.86. | |||

