Изобретение относится к автоматическому адресованию грузов в конвейерных системах при транспортировании штучных грузов и может быть использовано в машиностроительной, лесной, деревообрабатывающей и других отраслях промышленности.
Известны устройства для автоматического адресования грузов, включающие механизм адресов заказа и запоминающий механизм, инфромация которого считывается шаговым искателем. Однако в этих устройствах необходимо наличие стабилизированного источника напряжения и большое количество разнотипных элементов. При понижении температуры ниже нуля емкость заряженных конденсаторов падает в несколько раз, что ведет к значительному снижению надежности работы устройства.
Целью изобретения является повышение надежности и упрощение конструкции.
Это достигается за счет того, что ячейка блока запоминающего механизма выполнена в виде переключателей, снабженных элементами фиксации и радиально закрепленных на неподвижной стойке, в центральной части которой помещен и аговый механизм управления переключателями.
ротной опоре, снабженной храповым колесом, приводимым в движение приводом, закрепленным на неподвижной стойке, на которой расположен привод для импульсного перемещения рычага в вертикальной плоскости.
Элементы фиксации переключателей могут быть выполнены в виде плоских подпружиненных пластинок, западающих в лыски на штоке переключателей.
Для обеспечения возврата штока переключателей в первоначальное положение рычаг в своей конечной части снабжен роликом, поочередно взаимодействующим с выступающими поверхностями пластинок элементов фиксации переключателей.
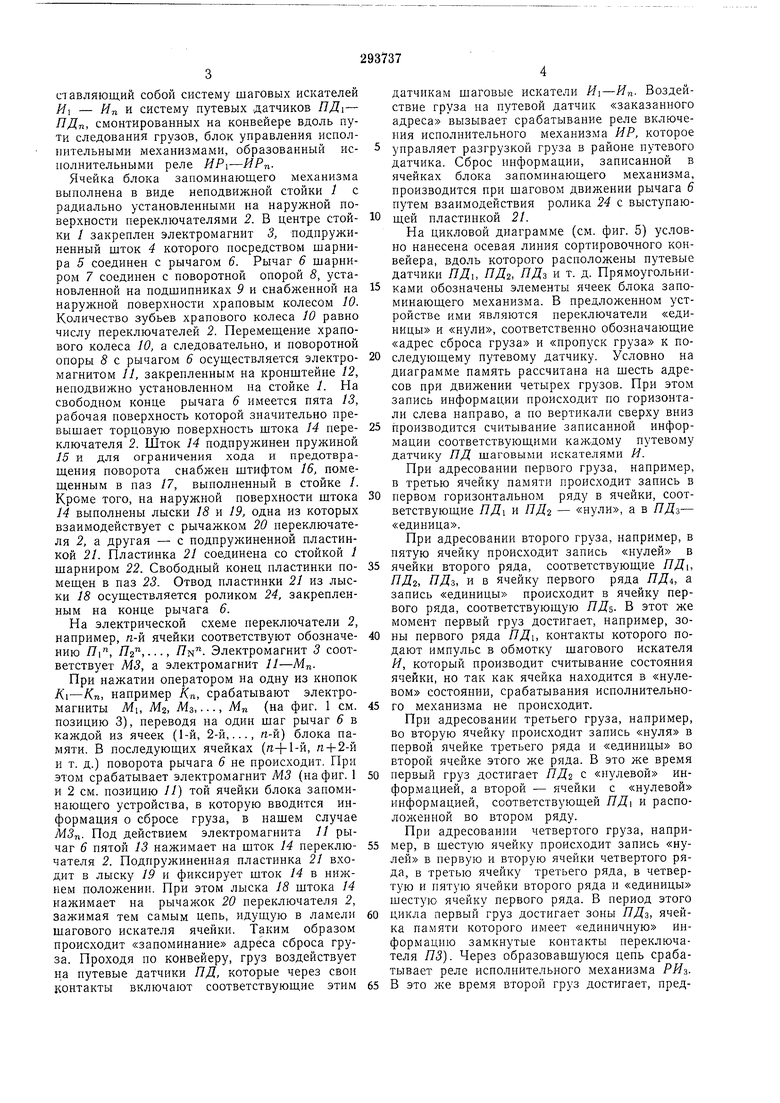
Па фиг. 1 изображена ячейка блока запоминающего устройства, вид сбоку; на фиг. 2- то же, вид сверху; на фиг. 3 - узел А на фиг. 3; на фиг. 4-вид по стрелке Б на фиг. 2;
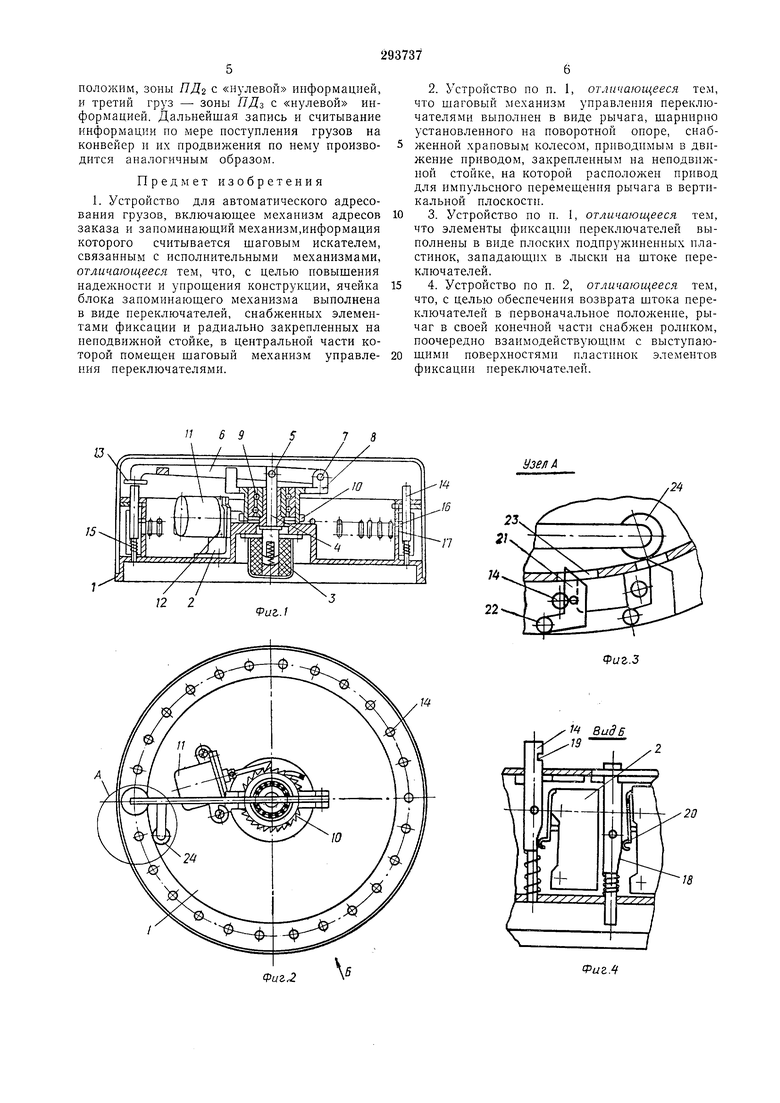
на фиг. 5 - цикловая диаграмма работы устройства; на фиг. 6 - принципиальная схема устройства.
В состав устройства для адресования груза входят цепи ввода информации, состоящие из
кнопок Ki-Кп, блок запоминающего механизма, образованный необходимым количеством однотипных ячеек, в состав которы.х входят переключатели - ЯN, электромагниты MI - Мп и M3i - Л13„, установленные
ставляющий собой систему шаговых искателей 1 - Ип и систему путевых датчиков ПД1- ПДп, смонтированных на конвейере вдоль пути следования грузов, блок управления исполнительными механизмами, образованный исполнительными реле MPi-ИРпЯчейка блока запоминающего механизма выполнена в виде неподвижной стойки 1 с радиально установленными на наружной поверхности переключателями 2. В центре стойки / закреплен электромагнит 3, подпружиненный шток 4 которого посредством шарнира 5 соединен с рычагом 6. Рычаг 6 шарниром 7 соединен с поворотной опорой 8, установленной на подшипниках 9 и снабженной на наружной поверхности храповым колесом 10. Количество зубьев храпового колеса 10 равно числу переключателей 2. Перемещение храпового колеса 10, а следовательно, и поворотной опоры 8 с рычагом 6 осуществляется электромагнитом 11, закрепленным на кронштейне 12, неподвижно установленном на стойке 1. На свободном конце рычага 6 имеется пята 13, рабочая поверхность которой значительно превышает торцовую поверхность штока 14 переключателя 2. Шток 14 подпружинен пружиной 15 и для ограничения хода и предотвращения поворота снабжен штифтом 16, помещенным в паз 17, выполненный в стойке /. Кроме того, на наружной поверхности штока 14 выполнены лыски 18 и 19, одна из которых взаимодействует с рычажком 20 переключателя 2, а другая - с подпружиненной пластинкой 21. Пластинка 21 соединена со стойкой 1 щарниром 22. Свободный конец пластинки помещен в паз 23. Отвод пластинки 21 из лыски 18 осуществляется роликом 24, закрепленным на конце рычага 6.
На электрической схеме переключатели 2, например, п-к ячейки соответствуют обозначению П, ,..., Як. Электромагнит 3 соответствует МЗ, а электромагнит 11-М„.
При нажатии оператором на одну из кнопок Al-Кп, например Кп, срабатывают электромагниты MI, MZ, MS,..., Мп (на фиг. 1 см. позицию 3), переводя на один шаг рычаг 6 в каждой из ячеек (1-й, 2-й,..., га-й) блока памяти. В последующих ячейках (/г-|-1-й, /г + 2-й и т. д.) поворота рычага 6 не происходит. При этом срабатывает электромагнит МЗ (на фиг. 1 и 2 см. позицию //) той ячейки блока запоминаюшего устройства, в которую вводится информация о сбросе груза, в нашем случае МЗп- Под действием электромагнита 11 рычаг 6 пятой 13 нажимает на шток 14 переключателя 2. Подпружиненная пластинка 21 входит в лыску 19 и фиксирует шток 14 в нижнем положении. При этом лыска 18 щтока 14 нажимает на рычажок 20 переключателя 2, зажимая тем самым цепь, идущую в ламели шагового искателя ячейки. Таким образом происходит «запоминание адреса сброса груза. Проходя по конвейеру, груз воздействует на путевые датчики ЯД, которые через свои контакты включают соответствующие этим
датчикам шаговые искатели Hi-Ип- Воздействие груза на путевой датчик «заказанного адреса вызывает срабатывание реле включения исполнительного механизма ИР, которое 5 управляет разгрузкой груза в районе путевого датчика. Сброс информации, записанной в ячейках блока запоминающего механизма, производится при шаговом движении рычага 6 путем взаимодействия ролика 24 с выступающей пластинкой 21.
На цикловой диаграмме (см. фиг. 5) условно нанесена осевая линия сортировочного конвейера, вдоль которого расположены путевые датчики ЯД, ЯД2, ЯДз и т. д. Прямоугольниками обозначены элементы ячеек блока запоминающего механизма. В предложенном устройстве ими являются переключатели «единицы и «нули, соответственно обозначающие «адрес сброса груза и «пропуск груза к последующему путевому датчику. Условно на диаграмме память рассчитана на шесть адресов при движении четырех грузов. При этом запись информации происходит по горизонтали слева направо, а по вертикали сверху вниз 5 производится считывание записанной информации соответствующими каждому путевому датчику ЯД шаговыми искателями И.
При адресовании первого груза, например, в третью ячейку памяти происходит запись в 0 первом горизонтальном ряду в ячейки, соответствующие ЯД1 и ЯДд - «нули, а в ЯДз- «единица.
При адресовании второго груза, например, в пятую ячейку происходит запись «нулей в 5 ячейки второго ряда, соответствующие ЯДь ЯД2, ЯДз, и в ячейку первого ряда ЯД4, а запись «единицы происходит в ячейку первого ряда, соответствующую ЯДа. В этот же момент первый груз достигает, например, зо0 ны первого ряда ЯД1, контакты которого подают импульс в обмотку шагового искателя И, который производит считывание состояния ячейки, но так как ячейка находится в «нулевом состоянии, срабатывания исполнительно5 го механизма не происходит.
При адресовании третьего груза, например, во вторую ячейку происходит запись «нуля в первой ячейке третьего ряда и «единицы во второй ячейке этого же ряда. В это же время 0 первый груз достигает ЯДг с «нулевой информацией, а второй - ячейки с «нулевой информацией, соответствующей ЯД и расположенной во втором ряду.
При адресовании четвертого груза, напри5 мер, в щестую ячейку происходит запись «нулей в первую и вторую ячейки четвертого ряда, в третью ячейку третьего ряда, в четвертую и пятую ячейки второго ряда и «единицы шестую ячейку первого ряда. В период этого цикла первый груз достигает зоны ЯДз, ячейка памяти которого имеет «единичную информацию замкнутые контакты переключателя ПЗ). Через образовавшуюся цепь срабатывает реле исполнительного механизма РИз. В это время второй груз достигает, предположим, зоны ЯД2 с «нулевой информацией, и третий груз - зоны ЯДз с «нулевой информацией. Дальнейшая запись и считывание информации по мере поступления грузов на конвейер и их продвижения по нему производится аналогичным образом. Предмет изобретения 1. Устройство для автоматического адресования грузов, включающее механизм адресов заказа и запоминающий механизм,информация которого считывается шаговым искателем, связанным с исполнительными механизмами, отличающееся тем, что, с целью повышения надежности и упрощения конструкции, ячейка блока запоминающего механизма выполнена в виде переключателей, снабженных элементами фиксации и радиально закрепленных на неподвижной стойке, в центральной части которой помещен шаговый механизм управле- 20 ния переключателями. 5 10 15 2. Устройство по п. 1, отличающееся тем, что шаговый механизм управления переключателями выполнен в виде рычага, шарнирно установленного на поворотной опоре, снабженной храповым колесом, приводимым в движение приводом, закрепленным на неподвижной стойке, на которой расположен привод для импульсного перемещения рычага в вертикальной плоскости. 3. Устройство по п. 1, отличающееся тем, что элементы фиксации переключателей выполнены в виде плоских подпружиненных пластинок, западающих в лыски на штоке переключателей. 4. Устройство по п. 2, отличающееся тем, что, с целью обеспечения возврата штока переключателей в первоначальное полол ;ение, рычаг в своей конечной части снабл ен роликом, поочередно взаимодействующим с выступающими поверхностями пластинок элементов фиксации переключателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ВРЕМЕННОГО ХРАНЕНИЯ РАЗЛИЧНЫХ ПРЕДМЕТОВ | 1966 |
|
SU215637A1 |
| Устройство для адресования ячеек непрерывных транспортных систем | 1960 |
|
SU142044A1 |
| Электроимпульсное устройство для автоматического адресования лесоматериалов на сортировочных транспортерах | 1961 |
|
SU146693A1 |
| Устройство для адрессования грузов | 1971 |
|
SU443823A1 |
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Устройство для автоматического адресования грузов подвесных конвейеров | 1981 |
|
SU1020324A1 |
| Устройство для адресования транспортных средств | 1980 |
|
SU910513A1 |
| Устройство для автоматического адресования грузов | 1972 |
|
SU477914A1 |
| Устройство для позиционного управления приводом подъемника | 1976 |
|
SU667479A1 |
| УСТАНОВКА ДЛЯ ПРОВЕРКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АВТОМОБИЛЕЙ | 1969 |
|
SU238197A1 |
Vui.l
Узел А
Фиг.з
-
18
