йсшученйЯ; дополнительных команд при достижении заданного , например, на выполнение цикла простановки или взятия груза в ячейке стеллажа, что снижает его эксплуатационные удобстfetr -- --; - - ..-.,„..-..,,.-,.;:.,..-..-... , -,.::,.-.,-..;.,. Цель изобретения - улучшение эксплуатационные Удобств устройства.
Цель достигается тем, что в предлагаемое устройство введены реле управления остановом и датчик наличия груза на столе подъемника, выполненный с замыкающим и размыкающим контактами, включенными мезйду источником питания и соответственно, одной и другой коммутирующими группами датчиков фактического положения, причем одноименные контакты групп этих датчйкьв- размещены со сдвигом на разность хода между верхним и нижним уровнями позиций адресования, .а их выходы соединены попарно и через другие ключевые элементы блока задания адреса включены в цепь питания обмотки реле управления остановом.
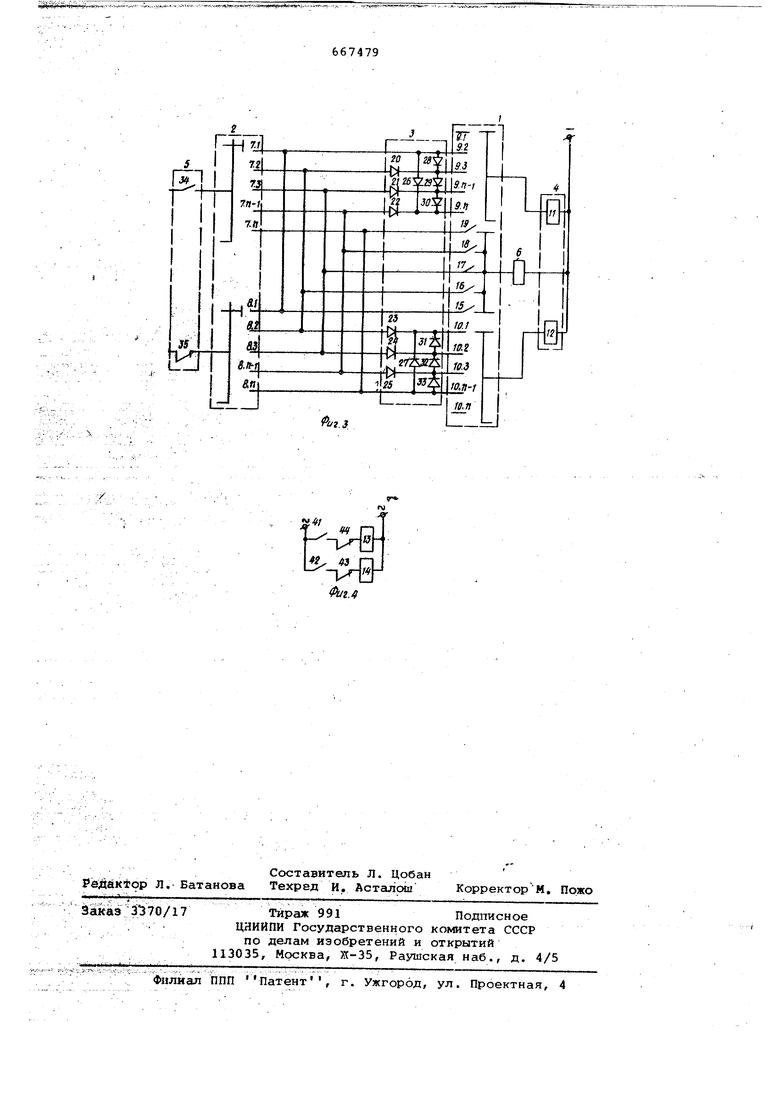
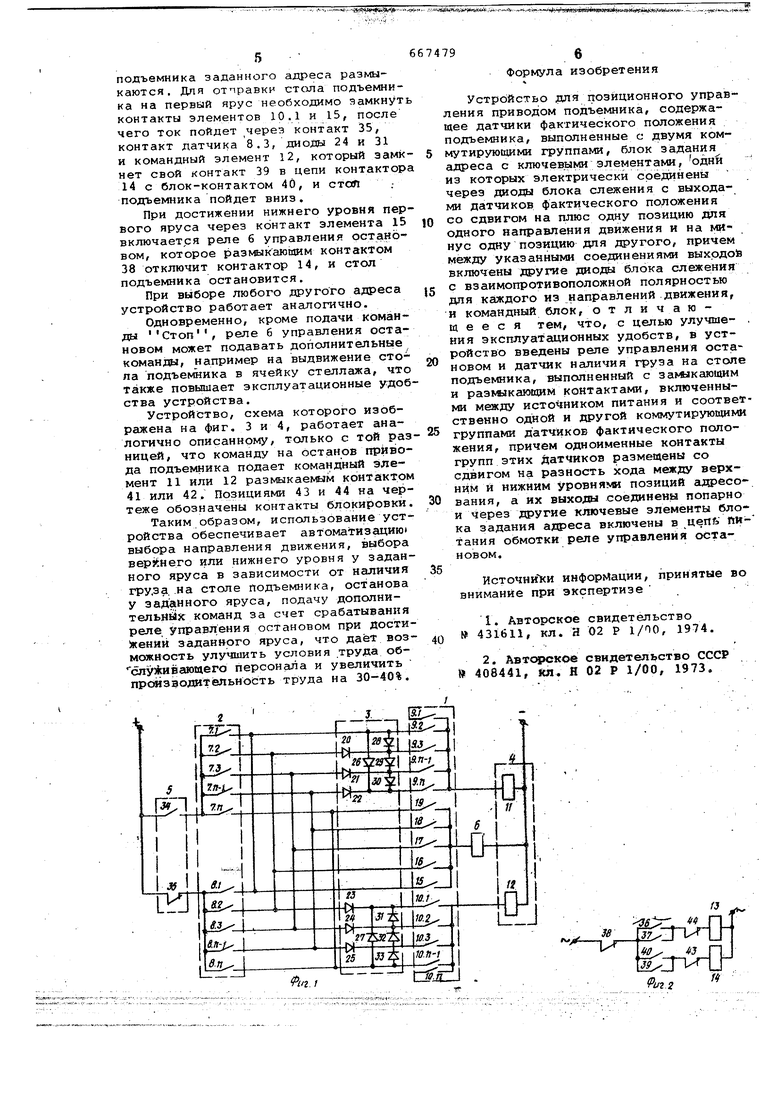
На фиг. 1 изображен один вариант у выполнения схемы устройства; на фиг. 2 - ОДИН вариант схемы включения. eSeiicftBHoro контактора , упраТвлтощего двигателем привода подъемника на фиг, З - другой вариант выполнения схемы устройст ва; на фиг. 4 другой вариант схемы включения реверсивного контактора.
Устройство содержит блок 1 задания адреса, блок 2 датчиков фактического положения, блок 3 слежения, командный блок 4, датчик 5 наличия груза на столе подъемника и реле 6 управления остановом.
На фиг. 1 изображена схема устройства, у которого в качестве датчиков фактического положения 7.1 - 7.П и 8.1 + 8.П могут бь1ть использованы любые путевые переключатели: контактные, бесконтактные, магнитные или электронные, цепи которых замкну- ты только тогда, когда возле них назсодйтся контролируемый механизм.В. KaiecTBe ключевых элементов 9.1 -t- 9 .п и 10.1 « 10.п блока 1 заЯйНйя адреса могут быть применены любые контактные или бесконтактные элементы, и удерживать их в замкну-. том состоянии после начала движения нет необходимости, так как командные элементы 11 и 12 только включают контакторы 1.3 и 14, а команду на. останов дает реле б управления остановом, п6дклк)чёнйое к выходам датчиков фактй.ческого положения через находящиеся в эамкнутом состоянии ключевые элементы 15-19.
На фиг. 3 и 4 изображена схема устройства, у которого в качестве датчиков 7.1 + 7.П и 8.1 + 8.п фактического положения применены пере|йЧаТ(апй, механически связанные с
приводом, или шаговые искатели, или любые другие контактные или бесконтактные переключатели, обязательным условием которых является переключение датчика положения без разрыва цепи.
в качестве ключевых элементов 9.1 ч- 9 .п и 10.1 + 10.п блока задан адреса также могут быть применены контактные или бесконтактные переключатели с обязательным удержанием их в замкнутом состоянии при движении к э аданному адресу.
Блок 3 слежения выполнен на диодах 20 + 33. Датчик 5 наличия груза на столе подъемника выполнен с замыКсцощим 34 и размыкающим 35 контактами.
Устройство работает следующим обраэрн.
Если, например, стоп подъемника находится у первого яруса в готовнасти приййть груз, то контакты датчика 8.1 фактического положения и контакт 35 датчика 5 наличия груза) «а столе подъемника будут замкнуты.
Если необходимо взять груз в окне ВЭДачи и отправить его в свободную ячейку третьего яруса, то в этом случае стоп совердает необходимые движения и принимает груз, после чего контакты д;атчика 8.1 и контакт 35 размыкаются, а контакты датчика 7.1 и контакт 34 замыкаются. Стол с грузом оказывается у верхнего уровня первого яруса.
При задании адреса третьего яруса замыкаются контакты элементов 9.3, 10.3 и 17, после чего срабатывает командный элемент 11, подающий команду Вверх, так как ток пойдет по цепи: контакт 34, контакт датчика 7.1, диод 28, элемент 9.3 и командный элемент 11. Командный элемент 12 и реле 6 управления остановом не срабатывают, так как к ним ток не поступает. Элемент 11 замыкающим контактом 36 включит контактор 13, который замкнет свой блок-контакт 37 и включит двигатель привода (на чертеже не Показан) , посл.е чего мёханИзмподъемника пойдет Вверх.
При достижении верхнего уровня третьего яруса замкнется контакт « датчика 7.3 и через контакт элемента 17 включится реле 6 управления остановом, дающее команду Стоп . за, счет размыкания контакта 38 в цепи контактора 13. Стол подъемника остановится у верхнего уровня третьего яруса.
После установки груза в заданную ячейку стол Освобождается от груза и занимает нижнее положение, контакт 34 и контакты датчика 7.3 размыкаются, а контакт 35 и контакт датчика 8.3 зг1мыкаются. Контакты элементов 9.3, 10.3 и 17 при достижении столом подъемника заданного адреса размыкаются. Для отправки стола подъемника на первый ярус необходимо замкнут контакты элементов 10.1 и 15, после чего ток пойдет через контакт 35, контакт датчика 8.3, диоды 24 и 31 и командный элемент 12, который замк нет свой контакт 39 в цепи контактор 14 с блок-контактом 40, и стоП подъемника пойдет вниз. При достижении нижнего уровня пер вого яруса через контакт элемента 15 включается реле 6 управления остановом, которое разкикаюидам контактом 38 отключит контактор 14, и стол подъемника остановится. При выборе любого другого адреса устройство работает аналогично. Одновременно, кроме подачи команды Стоп, реле б управления остановом может подавать дополнительные команда, например на выдвижение стопа подъе1«яика в ячейку стеллажа, что также повышает эксплуатационные удоб ства устройства. Устройство, схема которого изображена на фиг. 3 и 4, работает аналогично описанному, только с той раз
вицей, что команду на останов привода подъемника подает командный элемент 11 или 12 размыкаемым контактом 41 или 42. Позициями 43 и 44 на чертеже обозначены контакты блокировки.
Таким образом, использование устройства обеспечивает автоматизацию выбора направления движения, выбора верхнего или нижнего уровня у заданного яруса в зависимости от наличия груза, .на столе подъемника, останова у заданного яруса, подачу дополнительнйх команд за счет срабатывания реле, управления остановом при достижений заданного яруса, что даёт возможность улучшить условия труда об слуАивающего персонала и увеличить произаодительноеть труда на 30-40%. | ii::z:n L t 71 1 иеттда 25 JS-fM
жения, причем одноименные контакты групп этих Датчиков размещены со сдвигом на разность хода между верхним и нижним уровнями позиций г1дресования, а их выходы соединены попарно и через другие ключевые элементы блока задания аяреса включены в цепь Питания обмотки реле управления остановом.
Источники информации,
принятые во внимание при экспертизе
1. Авторское свидетельство № 431611, кл. Н 02 Р 1/00, 1974.
2. Автсфское свидетельство СССР 408441, йл. Я 02 Р 1/00, 1973. -T -- I 79g Формула изобретения Устройство для позиционного управления приводом подъемника, содержащее датчики фактического положения подъемника, выполненные с двумя коммутирующими группами, блок задания адреса с ключевыми элементами, одни из которых электрически соединены через диоды блока слежения с выходами датчиков фактического положения со сдвигом на плюс одну позицию для одного направления движения и на минус одну позицию для другого, причем между указанными соединениями выходой включены другие диоды блока слежения с взаимопротивоположной полярностью для каждого из направлений движения, и командный блок, отличающееся тем, что, с целью улучше- , ния эксплуатационных удобств, в устройство введены реле управления ocTiaновом и датчик наличия груза на столе подъемника, выполненный с заьвлкающим и размыкающим контактами, включенными между источником питания и соответственно одной и другой коммутирующими группами датчиков фактического полоlFJt-.-.)
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением кабины подъемника | 1984 |
|
SU1355581A1 |
| Устройство для управления движением кабины подъемника | 1979 |
|
SU1028589A1 |
| Устройство управления грузоподъемным механизмом | 1982 |
|
SU1134518A1 |
| Устройство для управления движением кабины и открывания дверей лифта | 1975 |
|
SU603629A1 |
| Устройство для автоматического вы-бОРА НАпРАВлЕНия дВижЕНия Об'ЕКТА | 1979 |
|
SU819018A2 |
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1263598A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1184768A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1164166A1 |
| УСТРОЙСТВО ДЛЯ ПУСКА ДИЗЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2062713C1 |
| Устройство для управления координатным транспортным средством | 1990 |
|
SU1718234A1 |