Известен захват для автооператора, содержащий две параллельные плиты, сопряженные между собой центрально расположенной колонкой, укрепленной на плите, обращенной к заготовке и втулкой с окном, установленной на противоположной плите, и связанные шарнирными звеньями с захватывающими рычагами.
Предлагаемый захват для автооператора отличается тем, что колонка снабжена качающимся фиксатором с впадинами и зубом, взаимодействующим с окном втулки и удерживающим захватывающие рычаги в разведенном состоянии, а во втулке расположена свободно установленная на оси собачка, попеременно взаимодействующая с одной из впадин фиксатора.
Такое выполнение захвата упрощает его конструкцию.
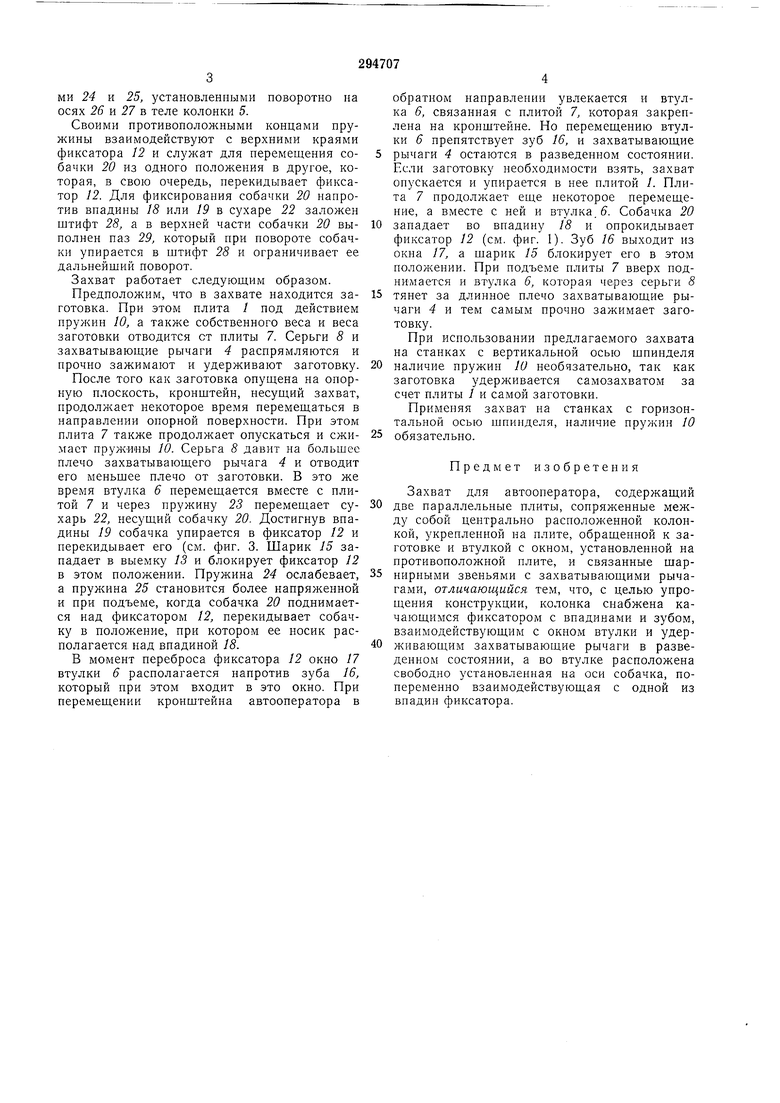
На фиг. 1 схематично изображен предлагаемый захват; на фиг. 2 - то же, вид в плане; на фиг. 3 - узел Л на фиг. 1.
Захват для автооператора содержит плиту /, в пазах 2 которой на осях 3 расположены поворачивающиеся двуплечия, захватывающие рычаги 4, слул :ащие для удержания заготовки в процессе ее переноса. На плите 1, обращенной к захватываемой детали, закреплена колонка 5, на которой расположена с возможностью возвратно-поступательного перемещения втулка 6, прикрепленная к нлите /, параллельной плите 1. проушинам Втулки 6 на осях прикреплены серьги в, которые, в свою очередь, шариирно связаны с двуплечими захватывающими рычагами 4. Между плитами 7 и 1 расположены три стойки 9 с винтовыми пружинами 10, которые стремятся развести эти плиты и тем самым привести захватывающие рычаги 4 в положение, при котором они удерживают заготовку. Па верхнем конце колонки 5 выполнена прорезь, в которой на оси П подвешен плоский качающийся фиксатор 12, имеющий в части две выемки 13 и 14, в одну из которых
западает подпружиненный шарик 15, блокирующий фиксатор.
На фиксаторе 12 имеется зуб 16, который может западать в окно 17, выполненное на втулке 6, и при этом сохранять положение
захватывающих рычагов 4 в разведенном состоянии. В верхней части фиксатор 12 имеет впадины 18 и 19, равностоящие от его оси, которые могут поочередно взаимодействовать с собачкой 20. В результате этого фиксатор 12 может занимать различное положение. Собачка 20 расположена на оси 21, закрепленной в сухаре 22, который скользяще установлен во втулке 6 и нодпружинен пружиной 23 для предотвращения поломок. Соми 24 и 25, установленными поворотно на осях 26 н 27 в теле колонки 5. Своими нротивонололсными концами пружины взаимодействуют с верхними краями фиксатора 12 н служат для перемещения со- 5 бачки 20 из одного положения в другое, которая, в свою очередь, перекидывает фиксатор 12. Для фиксирования собачки 20 напротив внадины 18 или 19 в сухаре 22 заложен щтифт 28, а в верхней части собачки 20 вы- 10 полнен паз 29, который при повороте собачки упирается в штифт 28 и ограничивает ее дальнейший поворот. Захват работает следующим образом. Предположим, что в захвате находится за- 15 готовка. При этом плита / под действием нружин 10, а также собственного веса и веса заготовки отводится от плиты 7. Серьги 8 и захватывающие рычаги 4 распрямляются и прочно зажимают и удерживают заготовку. 20 После того как заготовка опущена на опорную нлоскость, кронщтейн, несущий захват, продолжает некоторое время перемещаться в направлении опорной поверхности. При этом плита 7 также продолжает опускаться и ежи- 25 мает пружииы 10. Серьга 8 давит на большее плечо захватывающего рычага 4 и отводит его меньшее плечо от заготовки. В это же время втулка 6 перемещается вместе с плитой 7 и через пружину 25 перемещает су- 30 харь 22, несущий собачку 20. Достигнув впадины 19 собачка упирается в фиксатор 12 и перекидывает его (см. фиг. 3. Шарик 15 западает в выемку 13 и блокирует фиксатор /2 Б этом положении. Пружина 24 ослабевает, 35 а 25 становится более напряженной и при подъеме, когда собачка 20 поднимается над фиксатором 12, перекидывает собачку в положение, при котором ее носик располагается над впадиной 18. В момент переброса фиксатора 12 окно 17 втулки 6 располагается напротив зуба 16, который при этом входит в это окно. При перемещении кронштейна автооператора в обратном нанравлении увлекается и втулка 6, связанная с плитой 7, которая закреплена на кронштейне. Но перемещению втулки 6 пренятствует зуб 16, и захватывающие рычаги 4 остаются в разведенном состоянии, Если заготовку необходимости взять, захват опускается и упирается в нее плитой /. Плита 7 продолжает еще некоторое перемещение, а вместе с ней и втулка,5. Собачка 20 западает во впадину 18 н опрокидывает фиксатор 12 (см. фиг. 1). Зуб 16 выходит из окна 17, а щарик 15 блокирует его в этом положении. При подъеме плиты 7 вверх поднимается и втулка 6, которая через серьги 8 тянет за длинное плечо захватывающие рычаги 4 и тем самым прочно зажимает заготовку. При использовании предлагаемого захвата на станках с вертикальной осью щпипделя наличие пружин 10 необязательно, так как заготовка удерживается самозахватом за счет плиты / и самой заготовки. Применяя захват на станках с горизонтальной осью шпинделя, наличие пружин 10 обязательно, Предмет изобретения Захват для автооператора, содержащий две параллельные плиты, сопряженные между собой центрально расположенной колонкой, укрепленной на плите, обращенной к заготовке и втулкой с окном, установленной на противоположной плите, и связанные щарнирными звеньями с захватывающими рычагами, отличающийся тем, что, с целью упрощения конструкции, колонка снабжена качающимся фиксатором с впадинами и зубом, взаимодействующим с окном втулки и удерживающим захватывающие рычаги в разведенном состоянии, а во втулке расположена свободно установленная на оси собачка, попеременно взаимодействующая с одной из впадин фиксатора.
22
20
-Х/
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1982 |
|
SU1085754A1 |
| Автоматическая линия штамповки лезвий стрельчатых лап | 1984 |
|
SU1255263A1 |
| Автооператор | 1974 |
|
SU492375A1 |
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в зону обработки | 1986 |
|
SU1524959A1 |
| ЗАМКОВОЕ УСТРОЙСТВО | 1969 |
|
SU244814A1 |
| Устройство для изготовления диафрагмы галетного элемента | 1976 |
|
SU574792A1 |
| ПРЕСС С РЕВОЛЬВЕРНОЙ ГОЛОВКОЙ | 1970 |
|
SU273628A1 |
| Устройство для штабелирования деталей с отверстиями | 1986 |
|
SU1459780A2 |
| Одноручьевой штамп для высадки деталей из штанги на гкм | 1971 |
|
SU447209A1 |


20
Узел А
