Известно устройство для управлейия исполнительным редукторным асинхронным двигателем (ИД) в следящей системе, содержащее усилитель (УД) в цепи рабочей обмотки двигателя, датчик позиционной обратной связи (ДОС) блок выработки напрял ения, пропорционального скорости двигателя (Т) и узел формирования корректирующего сигнала (ФК) в интервалах времени несовпадения знаков сигналов на выходе УД и выходе узла.
В известном устройстве для увеличения статической и динамической точности механизма в определенные интервалы времени отключается напряжение питания двигателя.
Предложенное устройство более соверщенно, так как обеспечивает надежуню работу при больших статических нагрузках и уменьщает величину перерегулирования следящих систем.
Это обеспечивается тем, что в устройстве применен элемент форсировки, работающий в ключевом , один из входов которого соединен с выходом узла формирования корректирующего сигнала ФК, а другой - с выходом блока выработки напряжения, причем выход блока соединен со входом усилителя, в результате чего корректирующий- сигнал вводится в качестве дополнительного сигнала управления двигателем.
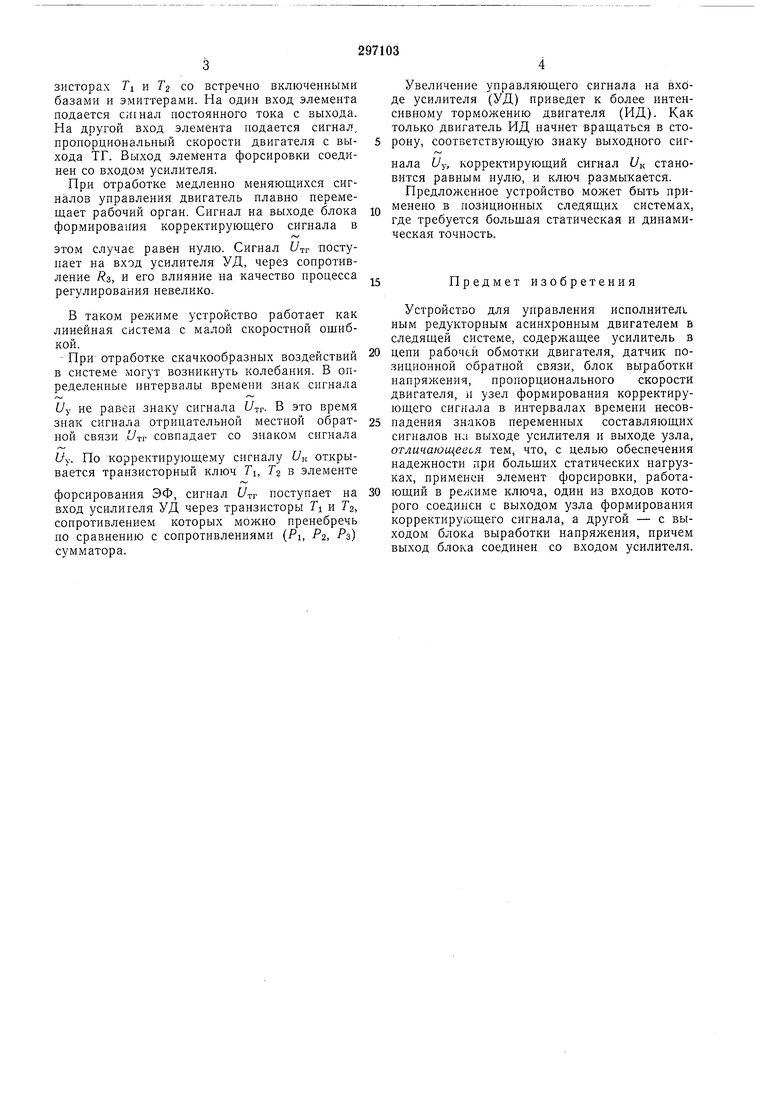
На фиг. 1 показана структурная схема предлагаемого устройства; на фиг. 2-принципиальная схема устройства. В устройстве (см. фиг. 1) вход иополнительного редукторного двигателя ИД соединен с усилителем двигателя УД, на входе которого суммируются сигналы управления U обратной связи Uoc и корректирующий сигнал t/тг, а выход ИД соединен с датчиком обратной связи ДОС и блоком ТГ, измеряющим скорость двигателя. Кроме того, выходы усилителя блока выработки напрял ения соединены со входами формирователя корректирующего сигнала ФК, а выходе ФК и ТГ соединены со входами элемента форсировки ЭФ.
Усилитель двигателя УД (см. фиг. 2) содержит электрический сумматор сигналов управления Ц и сигналов Ugc и обратных связей, выполненный на сопротивлениях.
Блок формирования корректирующего сигнала Фкс представляет собой анализатор знаков переменной составляющей сигналов усилителя Uy и тахогенератора и вырабатывает корректирующий сигнал UK. Причем
UK Q при sign t/тг и УК const при
зисторах TI и Т2 со встречно включенными базами и эмиттерами. На один вход элемента подается сигнал постоянного тока с выхода. На другой вход элемента подается сигнал, пропорциональный скорости двигателя с выхода ТГ. Выход элем-ента форсировки соединен со входом усилителя.
При отработке медленно меняющихся сигналов управления двигатель плавно перемещает рабочий орган. Сигнал на выходе блока формирования корректирующего сигнала в
этом случае равен нулю. Сигнал поступает на вход усилителя УД, через сопротивление Rs, и его влияние на качество процесса регулирования невелико.
В таком режиме устройство работает как линейная система с малой скоростной ошибкой.
При отработке скачкообразных воздействий в системе могут возникнуть колебания. В определенные интервалы времени знак сигнала
t/y не равен знаку сигнала Ьтг. В это время знак сигнала отрицательной местной обратной связи .с/тг совпадает со знаком сигнала
Уу. По корректирующему сигналу UK открывается транзисторный ключ Т, Т в элементе
форсирования ЭФ, сигнал t/тг поступает на вход усилителя УД через транзисторы Т и Тг, сопротивлением которых можно пренебречь по сравнению с сопротивлениями (Pi, Р2, PS) сумматора.
Увеличение управляющего сигнала на входе усилителя (УД) приведет к более интенсивному торможению двигателя (ИД). Как только двигатель ИД начнет вращаться в сторону, соответствующую знаку выходного сигнала Uy, корректирующий сигнал UK становится равным нулю, и ключ размыкается.
Предложенное устройство может быть применено в позиционных следящих системах, где требуется больщая статическая и динамическая точность.
Предмет изобретения
Устройство для управления исполнителе ным редукторным асинхронным двигателем в следящей системе, содержащее усилитель в
цепи рабочей обмотки двигателя, датчик позиционной обратной связи, блок выработки напряжения, пропорционального скорости двигателя, и узел формирования корректирующего сигнала в интервалах времени несовпадения знаков переменных составляющих сигналов на выходе усилителя и выходе узла, отличающееся тем, что, с целью обеспечения надежности при больщих статических нагрузках, применен элемент форсировки, работающий в режиме ключа, один из входов которого соединен с выходом узла формирования корректирующего сигнала, а другой - с выходом блока выработки напряжения, причем выход блока соединен со входом усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ ДВИГАТЕЛЕМ С СУХИМ ТРЕНИЕМ | 1968 |
|
SU220335A1 |
| Устройство для программного управленияпРиВОдОМ | 1978 |
|
SU798724A1 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| Следящий пъезопривод с коррекцией неоднозначной статической характеристики | 1982 |
|
SU1120279A1 |
| Устройство для управления шаговым двигателем | 1985 |
|
SU1295501A1 |
| СПОСОБ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ СЛЕДЯЩЕГО ПРИВОДА С ЛЮФТОМ В МЕХАНИЧЕСКОЙ | 1973 |
|
SU389604A1 |
| Программная следящая система | 1981 |
|
SU1108394A1 |
| Следящая система | 1982 |
|
SU1109711A1 |
| Устройство аналого-цифрового преобразования | 1988 |
|
SU1501268A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
- -УЛЛ-. -о m
