Изеестны устройства для управления двигателем, в которых корректирующее воздействие осуществляется Нри помощи нелинейных связей.
Предложенное устройство отличается от известных тем, что, с целью повышения надежности и качества работы устройства, в нем на выходе усилителя сигнала ошибки включены последовательно соединенные блок выделения модуля и апериодический фильтр, а на выходке тахогенератора - второй блок выделения модуля, причем выход этого блока и выход апериодического фильтра через блок сравнения и корректирующий усилитель подсоединены к электронному ключу, установленному в цепи управления двигателя.
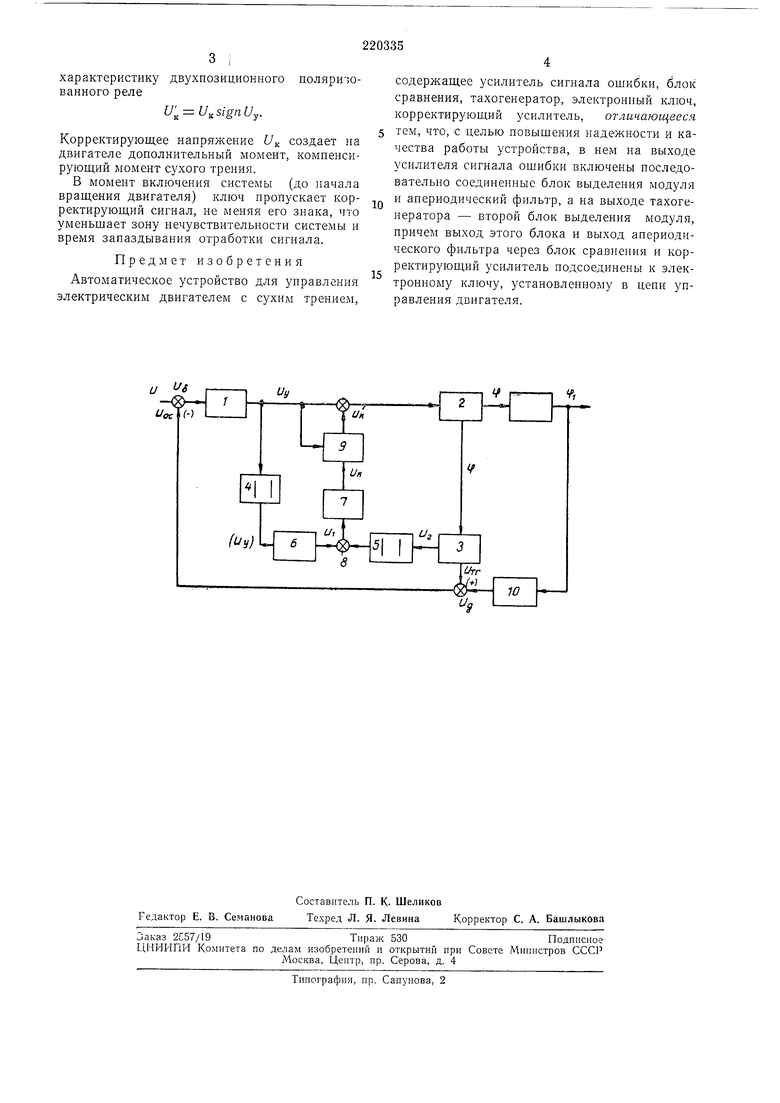
На чертеже представлена блок-схема устройства.
Устройство содержит усилитель 1 сигнала ошибки, двигатель 2, тахогенератор 3j блоки 4 и 5 выделения модуля, апериодический фильтр 6, корректирующий усилитель 7, блок сравнения 8, электронный ключ 9 и датчик /О обратной связи.
литель 1, который может представлять собой инерционное или безынерционное звено. Сигнал Uy с выхода усилителя суммируется с сигналом UK, компенсирующим момент сухого трения, и подается на управляющую обмотку исполнительного двигателя 2, который задает объекту управления соответствующий угол фь Датчик 10 обратной связи преобразует угол ф1 в напряжение U f,, которое суммируется с напряжением тахогенератора 3 и образует напряжение обратной связи.
Сигнал, компенсирующий момент сухого трения, вырабатывается корректирующим контуром. Модуль сигнала с выхода усилителя /, образованный блоком 4 выделения модуля, подается на апериодический фильтр 6 с постоянной времени Т, равной постоянной времени двигателя. Сигнал Ui, снимаемый с фильтра 6,
сравнивается с модулем сигнала U- тахогенератора, полученного с блока 5. Разностный сигнал , ностзпающий с блока сравнения 8, усиливается корректирующим усилителем с коэффициентом усиления Кк- С выхода усилителя сигнал Uy поступает на ключ 9. Ключ представляет собой простейшее устройство, которое в зависимости от знака сигнала Uy выдает напряжение U, величина которого равна величине напряжения U, а знак совпадает
характеристику двухпозиционного поляриюванного реле
к Sg У
Корректирующее напрялсение U создает на двигателе дополнительный момент, компенсирующий момент сухого трения.
В момент включения системы (до начала вращения двигателя) ключ нронускает корректирующий сигнал, не меняя его знака, что уменьшает зону нечувствительности системы и время запаздывания отработки сигнала.
Предмет изобретения Автоматическое устройство для управления электрическим двигателем с сухим трением.
содержащее усилитель сигнала он1ибки, блок сравнения, тахогенератор, электронный ключ, корректирующий Зсилитель, отличающееся тем, что, с целью повышения надежности и качества работы устройства, в нем на выходе усилителя сигнала ошибки включены последовательно соединенные блок выделения модуля и апериодический фильтр, а на выходе тахогенератора - второй блок выделения модуля, причем выход этого блока и выход апериодического фильтра через блок сравнения и корректирующий усилитель подсоединены к электронному ключу, установленному в цепи управления двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1989 |
|
SU1732329A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ РЕДУКТОРНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 1971 |
|
SU297103A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Способ и устройство выборки люфта в кинематической передаче опорно-поворотного устройства с двумя взаимосвязанными электроприводами | 2019 |
|
RU2726951C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |
| Следящая система | 1984 |
|
SU1216773A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1425594A2 |
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
| Аналого-цифровой интегратор | 1979 |
|
SU813456A2 |
| СПОСОБ АДАПТИВНОЙ АНТИРЕЗОНАНСНОЙ КОРРЕКЦИИ НЕСТАБИЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНОГО ОБЪЕКТА УПРАВЛЕНИЯ И САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174252C1 |
fi
