1
Предлагаемый способ управления исполнительным двигателем относится к регулированию электрических двигателей IB зависимости от их параметров.
Известен способ управления исполн-ительными двигателями следящего привода с люфтом в механической передаче, заключающийся в подаче в цепь управления двигателем задающего сигнала и сигнала для компенсации инерционности.
Однако зависимость длительности корректирующего сигнала и времени выбора люфта от величины входного воздействия не позволяет для увеличения эффективности управления применить увеличение длительности корректирующего сигнала. При малых входных воздействиях это приводит к появлению автоколебаний и в конечном итоге к неустойчивости всего следящего привода.
Изобретение позволяет повысить точность и улучшить качество переходных процессов следящего привода с люфтом в механической передаче. Это достигается лутем существенного уменьшения зависимости времени выбора люфта от величины входного воздействия.
По Предлагаемому способу с целью повышения точности и улучшения качества переходных (Процессов в МО-мент перехода скорости двигателя через нуль формируют два сигнала: один - пропорциональны по длительности величине задающего сигнала, другой - постоянной длительности, определяемой величиной люфта и инерционностью двигателя. Из сформированных сигналов на двигатель подают наибольший по длительности и если им оказывается сигнал постоянной длительности, то сразу после его окончания подают сигнал обратной полярности (фазы), длительность которого определяется величиной входного
сигнала.
Предложенный способ иллюстрируется чертежами.
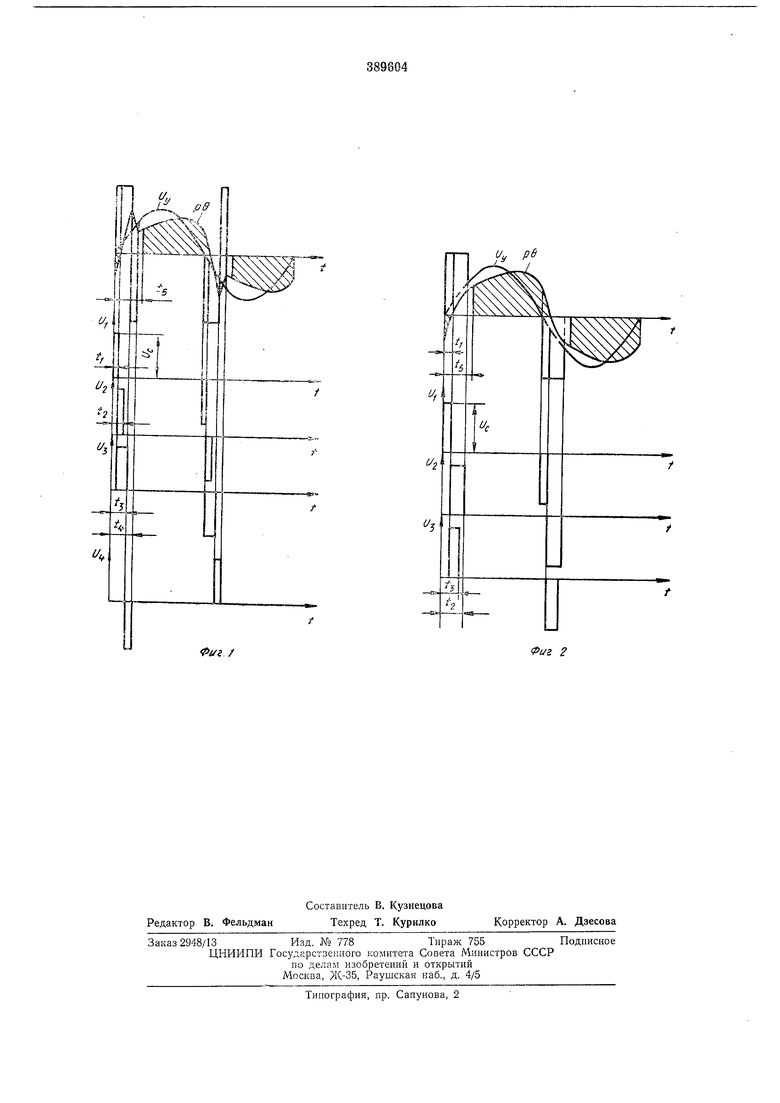
Hai фиг. 1 тфедставлены эпюры входных и выходных сигналов исполнительного двигателя при «малых амплитудах колебаний; на фиг. 2 - эпюры входных и выходных сигналов исполнительного двигателя при «больших амплитудах колебания.
На чертежах обозначено: L/y-управляющий
нескорректированный сигнал; р@ - скорость вращения двигателя (или сигнаш, пропорциональный ей); Ui - корректирующий сигнал, формируемый во время несовпадения знаков задающего и выходного (скорости) сигналов
двигателя; Uz- корректирующий сигнал, пропорционалыуый по длительности величине задающего сигнала; Us - корректирующий сигнал постоянной длительности; U - согласующий корректирующий сигнал; fi - длительность сигнала Uc, tz-ti-длительность сигнала Uz, ta-ti - длительность сигнала /7з; и-ts - длительность сигнала 4-ti - время выбора люфта. В цеиь управления двигателя подают управляющий синусоидальный сигнал Uy UM-Sir(j3t, где UM - амплитуда, ш -частота колебаний. Вследствие инерционности двигателя выходной сигнал его рв сдвинут относительно задающего на угол -фо, заБисящий от постоянной времени двигателя Т и частоты колебаний задающего сигнала: Ьo arctg шГ. Поэтому при изменении знака задающего сигнала двигатель еще некоторое время (4 arc tg ш Г , ,, ) будет вращаться в прежнем «аПравлении. Выбор люфта начнется только тогда1, когда скорость вращения двигателя станет соответствовать полярности управляющ,его сигнала (sign sign/ 0). Следовательно, чтобы компенсировать влияние люфта IB автоматической системе, необходимо в первую очередь сократить интервал неравнозначности входных и выходных колебаний двигателя. Для этого в указанный промежуток времени на вход двигателя подают в соответствии с полярностью управляющего сигнала t/y корректирующий сигнал t/i постоянной амплитуды L/C. и - sign и у при sign Ну sign р9 f/i : О при sign Uy - sign рЬ В это время происходит форсированное торможение двигателя, в результате чего интервал Неравнозначности уменьщается (интервал ti на фиг. 1 и 2). Сразу носле совпадения знаков выходных и входных колебаний двигателя в цепь управления необходимо подать корректирующий сигнаш, который бы фороировал выбор люфта, не вызывая чрезмерного перерегулирования в системе. Это решают следующим образом. Величину люфта 2Ь рассматривают в качестве скачкообразного воздействия на систему амплитудой 2Ь. Для того, чтобы получить переходный процесс, близкий IK оптимальному по быстродействию, на вход исполнительного двигателя подают последовательно два сигнала постоянной ам1нлитуды, но разной полярности. Первый сигнал обеспечивает разгон двигателя, второй - торможение. В момент снятия второго корректирующего сигнала входное скачкообразное воздействие полностью отработано, т. е. люфт выбран, и двигатель остановлен (р9 0). Учитывая, что в это время на двигатель подают управляющий сигнал Uj, не равный нулю, величину выходного сигнала двигателя рв следует согласовать с величиной управляющего напряжения t/y. Поэтому при наличии управляющего воздействия t/y корректирующий сигнал должен быть снят в тот момент, когда выбрало не менее половины люфта и величина скорости двигателя соответствует величине управляющего напряжения /7у. Рассмотренная задача в предлагаемом способе управления двигателем реализуется следующим образом. В момент перехода скорости двигателя через нуль ( 0) формируЕотся два корректирующих сигнала IJz и (Уз постоянной амплитуды Не- Сигнал Hz, пропорциональный по длительности величине задающего сигнала у, предназначен для согла1С01Вания величины выходного сигнала рв с величиной управл.яющего сигнала f/y. t - t, k lj -sin№t, где ki - коэффициент пропорциональности между величиной сигнаша t/y и величиной интервала введения 4--ti сигнала Uz: Utf sin 0)4 Uyf - 4, Сигнал Us, длительность которого ts-ti за висит только от параметров двигателя и величины лю;фта1 в редукторе и, следовательно, является величиной постоянной для конкретной автоматической системы, обеспечивает разгон двигателя с целью форсированного выбора люфта. 1+е где k - коэффициент усиления исполнительного двигателя. Из сформированных сигналов УЗ и t/з в цепь управления двигателя подают наибольщий по длительности. Если таковым является сигнал Оз (интервал 4-ii на фиг. 1), что характерно для задающих воздействий с относительно небольщими амплитудами, то фактическая величина скорости двигателя рв в момент снятия сигнала Us будет превыщать значение, соответствую-щее величине задающего сигнала Uy. Если не принять специальных мер, это приведет к больщому перерегулированию в системе и в конечном итоге к неустойчивости системы. Поэтому в момент ta в цепь управления подают согласующий тормозящий сигнал С/4, который приводит в соответствие величину скорости рв с величиной управляющего воздействия Uy (интервал на фиг. i) и, и, (- sign Uy) при (4 - Л (4 - А) , 0при (,-О(а-О Если же наибольщим по длительности оказывается сигнал Uz (интервал tz-ti на иг. 2), что характерно для относительно больщих задающих воздействий, то согласование величины выходного сигнала рв с величиной управляющего воздействия Uy произойет только в момент снятия сигнала Uz. Это
исключает введение тормозящего согласующего сигнала.
При исиользовании предлагаемого способа управления существенно уменьщается зависимость времени выбора люфта от величины задающего воздейстВИЯ, причем время выбора люфта значительно меньше, чем при использовании ранее известных способов. Форсированный вы1бор люфта при этом не 1приводит к чрезмерному перерегулированию в онстеме. Помимо этого, здесь нет необходимости использовагоия производных от сигнала ошибки и выходного сигнала. Таким образом, предложенный способ управления исполнительным двигателем позволяет, несмотря на наличие люфта в редукторе, получать автомат1ичеок1ие системы с высокой добротностью.
Предлагаемый способ з правления исполнительным двигателем может быть реализован различным образом. Например, для выра ботки сигнала f/i могут быть использованы самые разнообразные схемы отрицания разнозначности. Сигналы С/а и f/4 могут быть реализованы, например, при помощи фантастронных
схем, схем вычитания нлн сра(Внения налрял ений (токов), сигнал Us-при номощи различных спусковых схем.
Предмет изобретения
Способ управления исполнительным двигателем следящего привода с люфтом в механической передаче, заключающийся в лодаче в цепь управления двигателем задающего сигнала и сигнала для комлеясации инерционности, отличающийся тем, что, с целью повышения точности и улучшения качества переходных процессов, в момент перехода скорости двигателя через формируют два сигналам
один - шропорциональный по длительности величине задающего сигнала, другой - постоянной длительности, причем из этих сигналов в цепь управления двигателем подают наибольщнй 1ПО длительности, и если им оказывается сигнал постоянной длительности, то сразу 1после его окончания подают сигнал обратной полярности (фазы), длительность которого определяется величиной задающего сигнала.
Фиг f
u p6
Фиг 2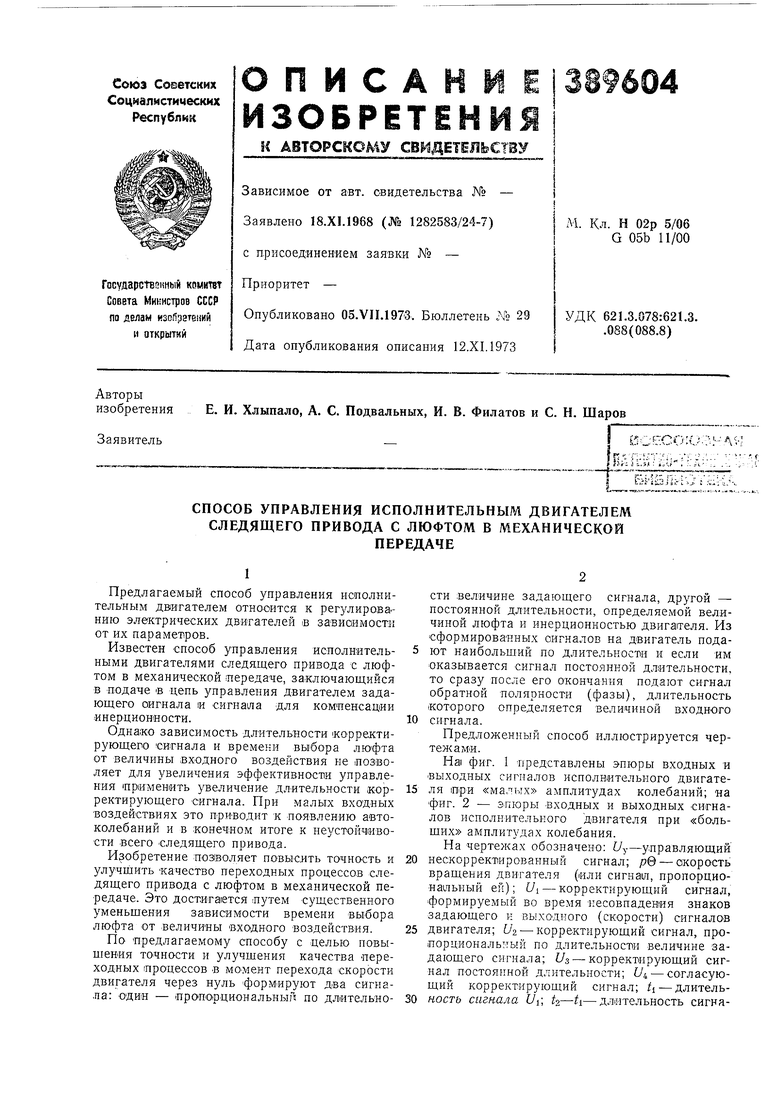

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ РЕДУКТОРНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 1971 |
|
SU297103A1 |
| Следящая система | 1979 |
|
SU840798A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 1972 |
|
SU435499A1 |
| Следящая система | 1984 |
|
SU1216773A1 |
| СПОСОБ САМОНАСТРОЙКИ КОЭФФИЦИЕНТА УСИЛЕНИЯ НЕЛИНЕЙНОГО РЕГУЛЯТОРА | 1969 |
|
SU248815A1 |
| Многоканальная система управления процессом приготовления смесей | 1973 |
|
SU495647A1 |
| Нелинейное корректирующее устройство для систем автоматического управления | 1978 |
|
SU752219A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |