Изобретение относится к области моделирования работы шаговых двигателей, например, к области управления ядерными энергетическими установками.
Известны устройства для моделирования работы шаговых двигателей, например, в приводах органов управления ядерными энергетическими установками, содержашие блок нелинейности, блок формирования модуля, генератор частоты квантования, ключевую схему, интегратор, запоминающ,ее устройство и формирующий фильтр.
Однако эти устройства сложны и недостаточно точны.
Предложенное устройство отличается тем, что Б нем блок нелинейности подключен через интегратор и последовательно включенные блок формирования модуля, генератор частоты квантования и ключевую схему ко входам запоминающего устройства, выход которого соединен со входом формирующего фильтра.
Это повышает точность имитации моделируемых процессов и упрощает устройство.
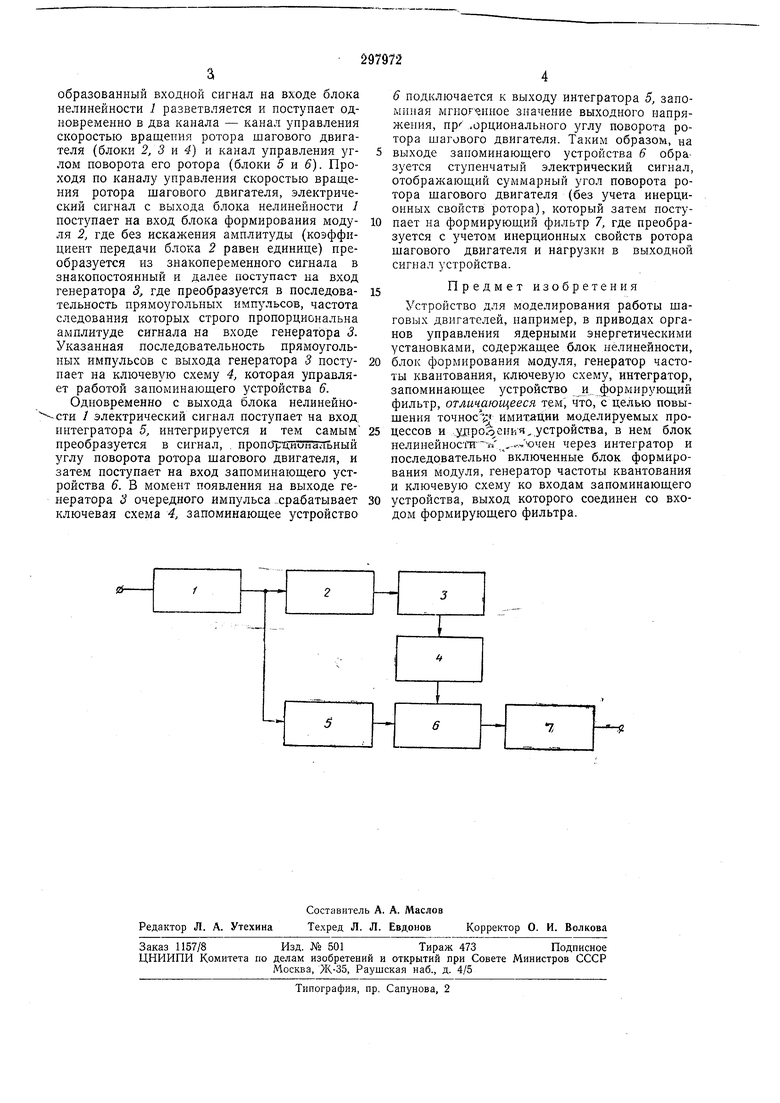
На чертеже приведена блок-схема устройства.
Схема содержит блок нелинейности /, блок формирования модуля 2, генератор частоты квантования 3, ключевую схему 4, интегратор 5, запоминающее устройство 6 и формирующий фильтр 7.
Блок нелинейности 1 представляет собой нелинейное звено, воспроизводящее статическую характеристику имитируемого шагового двигателя, выход которого соединен с блоком формирования модуля 2, предназначенным для преобразования знакопеременного сигнала в знакопостоянный. Выход блока формирования модуля 2 соединен со входом генератора 3, который предназначен для генерирования последовательности импульсов, частота следования которых пропорциональна скорости вращения ротора шагового двигателя. Генератор 3 через ключевую схему 4 соединен с запоминающим устройством 6. Блок нелинейности I соединен также с интегратором 5, который подключен ко входу запоминающего устройства 6, выход которого подключен к формирующему фильтру 7. Последний предназначен для коррекции выходного сигнала в
соответствии с требуемым видом переходного процесса на выходе шагового двигателя.
Имитатор шагового двигателя работает следующим образом. Входной электрический сигнал, пропорциональный сигналу рассогласования системы управления приводом регулирующих (компенсирующих) стержней, поступает на вход устройства к блоку нелинейности /, характеристика которого соответствует статической характериобразованный входной сигнал на входе блока нелинейности 1 разветвляется и поступает одновременно в два канала - канал управления скоростью вращения ротора шагового двигателя (блоки 2, 3 4 и канал управления углом поворота его ротора (блоки 5 и б). Проходя по каналу управления скоростью вращения ротора шагового двигателя, электрический сигнал с выхода блока нелинейности 1 поступает на вход блока формирования модуля 2, где без искажения амплитуды (коэффициент передачи блока 2 равен единице) преобразуется из знакопеременного сигнала в знакопостоянный и далее поступает на вход генератора 3, где преобразуется в последовательность прямоугольных импульсов, частота следования которых строго пропорциональна амплитуде сигнала на входе генератора 3. Указанная последовательность прямоугольных импульсов с выхода генератора 3 поступает на ключевую схему 4, которая управляет работой запоминающего устройства 6.
Одновременно с выхода блока нелинейно-сти / электрический сигнал поступает на вход, интегратора 5, интегрируется и тем самым преобразуется в сигнал, . пропорЩГшТаЛьный углу поворота ротора шагового двигателя, и затем поступает на вход запоминающего устройства 6. В момент появления на выходе генератора 3 очередного импульса - срабатывает ключевая схема 4, запоминающее устройство
6 подключается к выходу интегратора 5, запоминая значение выходного напряжения, пр- ,орционального углу поворота ротора шагового двигателя. Таким образом, на выходе запоминающего устройства 6 образуется ступенчатый электрический сигнал, отображающий суммарный угол поворота ротора шагового двигателя (без учета инерционных свойств ротора), который затем поступает на формирующий фильтр 7, где преобразуется с учетом инерционных свойств ротора шагового двигателя и нагрузки в выходной сигнал устройства.
Предмет изобретения
Устройство для моделирования работы шаговых двигателей, например, в приводах органов управления ядерными энергетическими установками, содержащее блок нелинейности, блок формирования модуля, генератор частоты квантования, ключевую схему, интегратор, запоминающее устройство ji. формирующий фильтр, отличающееся тем, что, с целью повышения точное имитации моделируемых процессов и yppooGHhч,.устройства, в нем блок нелинейнос1тг -й ----С)чен через интегратор и последовательно включенные блок формирования модуля, генератор частоты квантования и ключевую схему ко входам запоминающего устройства, выход которого соединен со входом формирующего фильтра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования механизмов шагового перемещения | 1981 |
|
SU1015401A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| УСТРОЙСТВО АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ | 1992 |
|
RU2042269C1 |
| Многодвигательный электропривод | 1984 |
|
SU1334349A1 |
| Автоматизированный стенд для испытания двигателя внутреннего сгорания | 1985 |
|
SU1280375A1 |
| ИНВЕРТОРНЫЙ ГЕНЕРАТОР И СПОСОБ УПРАВЛЕНИЯ ТАКИМ ГЕНЕРАТОРОМ | 2009 |
|
RU2406216C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2366069C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПОСЛЕДОВАТЕЛЬНОСТИ | 1972 |
|
SU349342A1 |
| Устройство для управления шаговым электродвигателем с дроблением шага | 1987 |
|
SU1417162A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА АСИНХРОННОГО ДВИГАТЕЛЯ | 1991 |
|
RU2039955C1 |
