Изобретение относится к области изготовления средств защиты органов дыха1ния человека от вредных для здоровья веществ и предназначено для использования его на предприятиях, близких к ;п/рОиэвОдству легкой промышленности, в частности к изготовлению странгуляторов к респираторам ткпа «лепесток.
До настоящего времени странгуляторы, шредставляющ ие собой пластину, -соедименную со шнуром, собирают вручную. Это снижает производительность труд-а.
Для повышения иро,из1водительности труда путем механизации процесса сборки странгуляTOipOB предлагаемый полуавтомат выполнен в виде секции, состоящей из :подвижных в одной плоскости двух вписанных одна в другую рам, несущих рабочие органы для формования пластины странгулятора и смонтированную перпендикулярно рамам скобу с захватами для ШНура и (Последующей подачи его к пластине, и управляемой приводом.
Одна рама может нести рабочие органы в виде установленных друг против друга пуансонов, а другая - матрицы, при этом целесообразно применить кулач-кавый привод, а полуавтомат снабдить несколькими последовательно расположенными свк1ция.ми, управляемыми приводом.
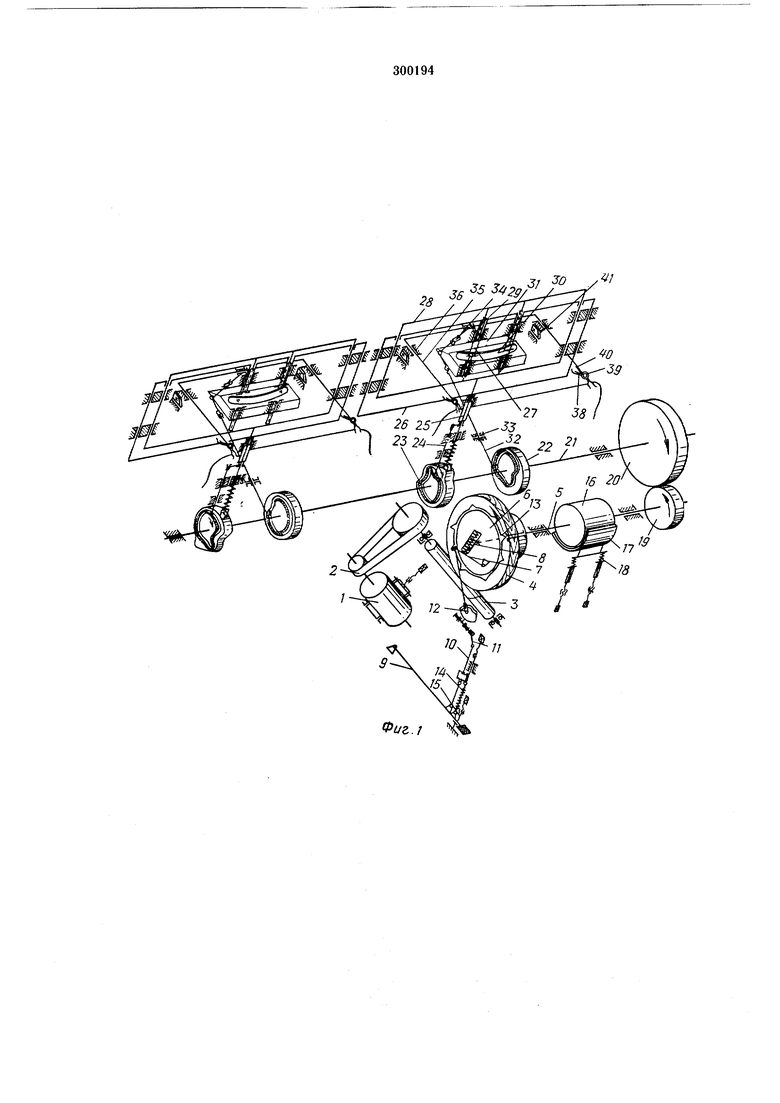
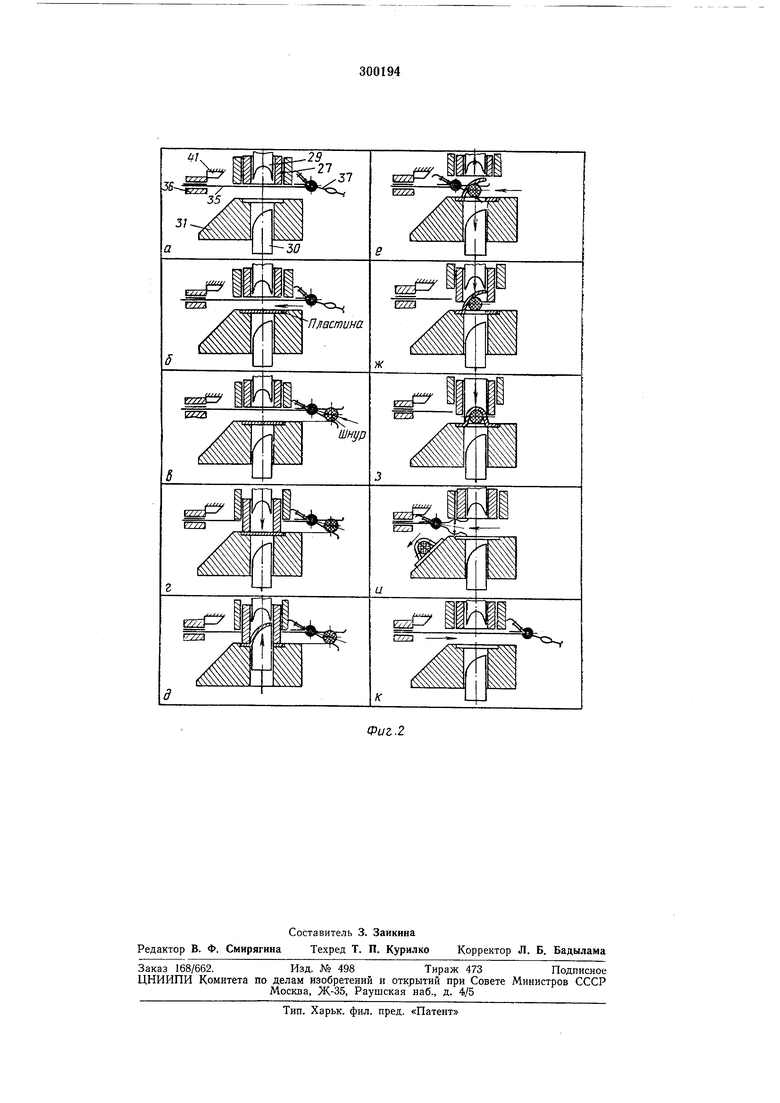
схема предлагаемого полуавтомата; на фиг. 2 - по1следовательные положения рабочих органов полуавтомата за один цикл сборки странгулятора.
Полуавтомат имеет электродвигатель 1, передающий движение через ременную передачу 2 на червячный вал 3, находящийся в востоя;нном зацеплении с червячным колесом 4. Последнее установлено свободно па глав0ном валу 5. Для жесткого периодического соединения вала с червячным колесом внутри его на валу закреплена однооборотная му-фта 6, в пазу которой смонтирована собачка 7, постоянно ст1ремящаяся свободным концом
5 выйти наружу под действием пружины 8. Педаль 9. через тягу 10, рычаг // связана с щарнирной скобой 12, которая удерживает собачку внутри паза муфты и может поворачиваться вокруг своей оси, освобождая выступающий конец собачки. Последний западает в один из паэов 13 червячного колеса, что приводит к сцеплению главного вала с червячной щестерней. Расцепление происходит после одного полного оборота главного вала три на5талкивании выступающего конца собачки на скобу 12, :котО|рая заставляет собачку углубиться в паз муфты. Пружина 14 в оз1вращает педаль в исходное положение до упора 15.
тормозное устройство, состоящее из бара-бана 16, устанавленного жестко на главном валу. К бараба«у постоянно 1прижата колодка 17 при помощи пружин 18.
На иротйвоположном конце вала с.монтирова:на -цилиндричеокая щестерня 19, находящаяся в зацеплении с большой шестерней 20, установленной на раанределительном валу 21, несущем кулачки 22 и 23. Эти кулачки повторены для другой секции полуавтомата со сдвигам их контура на 180°. Не исключается .воз1можцость, при которой кулачок 22 может быть (вьтолнен вместе с жулачком 23, если его паз расположить на свободном торце Общего .кулач1ка.
Вращение кулачка 23 обеспеч-ивает возвратно-поступательное перемещение щтоков 24 и 25. Шток 24 овязаи с рамой 26, имеющей ирцжимиые матрицы 27, а щток 25 овязан с рамой 28, несущей верхние п уансоны 29, напра1вляющи1ми для которых служат отверстия в матрицах 27. Противоположно верхним пуансона-м рашоложеиы пуансоны 30, которые помещены в натравляющей 31.
Благодаря вращению «улачка 22 качательное движение получает рьгчаг 32 вокруг оси 33. Этот рычаг через ща1р:нирную тягу 34 заставляет возвратночпоступательно перемещ ася скобу 35 в направляющих 36. На консолях скобы установлены неподвижно верхние губки захватав 37, соединенные щарнирно с нижними 1ПОД1ВИЖНЫМИ губками 38 посредством осей 39.
Для того, чтабы в свободном состоянии фиксирующие губки захвато)в были сведены, с обратной стороны их предусмотрены пластинчатые пружины 40. В «райнем положении скобы рубки зах1ватов разводятся под влиянием На1клон1ных плоскостей (копиров 41, которые контактируют с обращенными в их сторону концами нижних губак. Рычаг 32 имеет регулируемое плечо для изменения хода захватов, а для определенного положения их - регулируемую тягу 34.
Работает шолуавтомат следующим обраЗОМ.
Перед началом работы мащ.ина находится в исходном положении, включается электродвигатель /, что приводит IBO вращение червячное колесо 4, при этом (см. фиг. 2, /положение а) нижний пуансон 30 и верхний пуансон 29 разведены, а губки захватав 37 выдвинуты вперед. Закладывают пластину странгулятора в гнездо натравляющей 31 (положение б) и резиновый щнур в губки зах)ватов 37 (положение в), а затем кратковременно нажимают ногой на педаль 9. В результате этого свободный конец собачки 7 западает в один из пазоВ червячного колеса 4. Это апосабствует оцеплению главного вала 5 с червячной щестерней. При этом щестерня 19 через щестерню 20 заставит вращаться распределительный вал 21. Вначале под воздействием кулачка 23 приж;имается пластина матрицаади 27 (положение г), потом происходит просечка лластнны нижними пуансонами 30 (положение д) и возврат их в исходное положение. Последующее вступление в дейст)вие кулачка 22 заставит подать резиновый шнур иод выступы на пластине (УПОложение е). Далее матри1цы 27 прижимают щнур к пластине (положение ж), а верхние пуансоны 29 загибают ее выступ и надежно соединяют щнур с пластиной (положение з). Эта операция заве|рщается подъемом матриц и
верхних пуансонов. Выгружаются готовые изделия из мащины (положение и) в результате перемещения захватов 37 и встречи их свободных концов с наклонными поверхностями копиров 41. Это позволяет разжать захваты, и
странгулятор по лотку падает в бункер готовой продукции. Зах1ваты вО|ЭВращаются в исходное положение (положение/с).
Полуавтомат и.меет два комплекта рабочих органов и механизмов их непосредственного
при1вода (две саыции). Это/позволяет при передаточном отнощении шестерен 19 и 20 (см. фиг. 1), равном двум, работать с перекрытием вапомогательного времени машинным и пуском мащины от педали по желанию оператора, что повыщаст производительность труда.
Предмет изобретения
1.Полуавтомат для сборки странгуляторов к респираторам, отличающийся тем, что, с целью повьгщения произ1водительности труда,
он выполнен в виде секции, состоящей из подвижных в одной плоскасти двух вписа-нных одна в другую рам, несущих рабочие органы для формования пластины странгулятора и смонтированную перпендикулярно окобу с захватами для щкура и последующей подачи его к пластине, и .уиравляемой приводом.
2.Полуавтомат то п. 1, отличающийся тем, что одна из рам несет рабочие органы в виде установленных друг против друга пуансонов,
а другая рама - матрицы.
3.Полуавтомат по п. 1, отличающийся те.м, что (Применен кулач.ковый привод.
4.Полуавтомат по п. 1, отличающийся тем, что он имеет несколько (последовательно располож-енных секций, управляемых приводом. J/ jff J5 г.; 0
| название | год | авторы | номер документа |
|---|---|---|---|
| Полуавтомат для сборки странгуляторов к респираторам | 1974 |
|
SU526364A1 |
| Полуавтомат для связки упорных шарикоподшипников | 1952 |
|
SU96556A1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
| Полуавтомат для бракеража наполненных малогабаритных склянок | 1960 |
|
SU138569A1 |
| и ЗАПЕЧАТЫВАНИЯ ПАКЕТОВ ИЗ ЛЕНТОЧНОГО |Ий1:-н :. .. УПАКОВОЧНОГО МАТЕРИАЛА| BilBJlHCTEKA::"!-''Др1;., .•SsftlJl | 1973 |
|
SU378358A1 |
| Автомат для сборки хомута из ленты | 1972 |
|
SU562358A1 |
| Автомат для изготовления шнурков с металлическими или пленочными наконечниками | 1960 |
|
SU132506A1 |
| Устройство для поперечной резки листового материала | 1972 |
|
SU456724A1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
| Станок для изготовления цепей Галля | 1937 |
|
SU54790A1 |