Изобретение относится к области самонастраивающихся систем управления с перемен ной структурой.
Известны способы беспоисковой самонастройки систем с переменной структурой.
Предложенный способ отличается тем, что измеряют сигнал, пропорциональный одной из регулируемых фазовых координат, и сигнал регулирующего воздействия, формируют из этих сигналов второй сигнал переключения, обеспечивая выбором фазовой координаты объекта наибольшее фазовое смещение сигнала переключения относительно измеренного сигнала в требуемой области частот скользящего режима и изменяют с номощью сигнала переключения составляющие коэффициентов воздействия по производным сигналам ощибки.
Это позволяет обеспечить независимость показателей переходных процессов в системе при изменении в широких пределах параметров объекта управления.
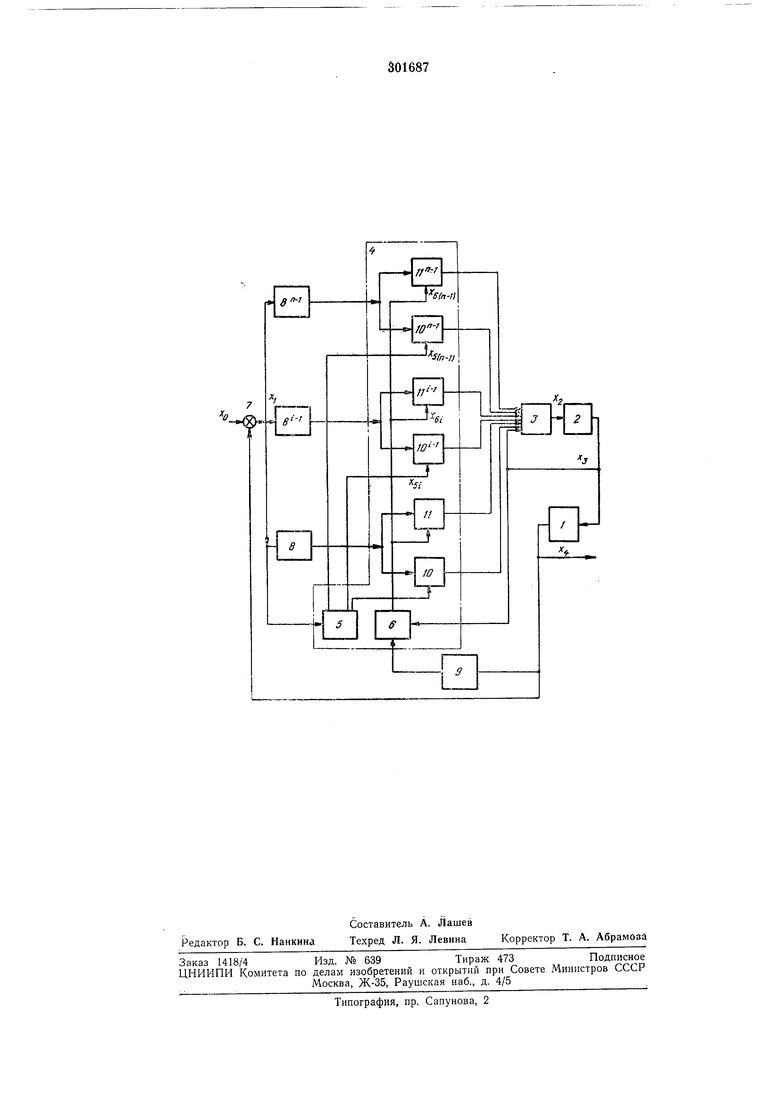
Па чертеже изображена блок-схема, поясняющая предложенный способ. .
На чертеже приняты следующие обозначения: Хо - входной сигнал; Xi - сигнал ошибки; Х2 - суммарный сигнал с выхода усилителя; л;з -выходная координата исполнит ельного органа; х - выходной сигнал; лтд, (xi, t) - первая функция переключения; Xei (х, Хз t) - Бторая функция переключения.
/ - объект управления, описываемый системой дифференциальных уравнений:;
п-m
2 aix X,
2 - исполнительный орган; 3 - суммирующий усилитель исполнительного органа; 4 - блок изменения структуры регулятора; 5 - блок формирования первого сигнала переключения Xzi (xi; t); б -блок формирования второго сигнала переключения Xei (х{ ; Хз t), 7 - элемент сравнения; 8, Si,... 8 - дифференциаторы, формирующие фазовые координаты системы; 9 - дифференциатор, формирующий /-Ю фазовую координату регулируемого сигнала 10, 10,..., /(«- - блоки фиксированных коэффициентов воздействия /Cs,; //, 11,..., - блоки фиксированных коэффициентов воздействия /Се;; xi (х, х , х, ... ,х ... х() - п-мерный вектор состояния системы; х1 -/-я - фазовая координата регулируемого сигнала; а; - коэффициенты дифференциального уравнения объекта. Основой формирования системы с переменной структурой является организация закона изменения структуры регулятора в виде:
/(,, г ( Ks При х,1 0;(ч
Выполнение уравнення () в системе с переменной структурой создает условие для возникновения скользящего режима, т. е. автоколебаний с малыми амплитудами, наложенными на медленно меняющуюся составляющую переходного нроцесса.
Для того, чтобы ноказатели переходного нроцесса не зависели бы от изменения в щироких пределах коэффициентов дифференциального уравнения а формируют второй сигнал переключения , с помощью которого дополнительно изменяют составляющие коэффициентов воздейстозия Ksi в блоках 11-10 - -.
При этом
/Cg; при Ха О, 0;
Кв1
g, при , 4)0; О при ,
x, g : k-x{l + x,.
где
Функция Xs формируется в блоке 6.
В случае управления согласно закону сигнал g (t) будет сдвигаться в скользящем режиме но фазе относительно неременной х в зависимости от изменения параметра at, что позволит изменить структуру и нараметры регулятора 4 в соответствии с изменением параметров flj. Коэффициент нропорциональности К и порядок (/) переменной х должны выбираться для каждого конкретного случая из условия наибольщего эффекта фазового смещения g (t) относительно Х4 в требуемой области частот скользящего режима.
Предмет изобретения
Способ бесноисковой самонастройки системы с переменной структурой, отличающийся тем, что, с целью обеснечения независимости показателей переходных процессов в системе
при изменении в щироких пределах параметров объекта управления, измеряют сигнал, пропорциональный одной из регулируемых фазовых координат, и сигнал регулирующего воздействия, формируют из этих сигналов
второй сигнал переключения, обеспечивая пыбором фазовой координаты объекта нанбольщее фазовое смещение сигнала переключения относительно измеренного сигнала в требуемой области частот скользящего и изменяют с помощью сигнала переключения составляющие коэффициентов воздействия но производным сигнала ощибки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система с переменной структурой | 1980 |
|
SU890361A1 |
| Система оптимального управления объектом второго порядка | 1977 |
|
SU651308A1 |
| СПОСОБ САМОНАСТРОЙКИ КОЭФФИЦИЕНТА УСИЛЕНИЯ НЕЛИНЕЙНОГО РЕГУЛЯТОРА | 1969 |
|
SU248815A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1989 |
|
SU1659981A2 |
| Способ формирования сигнала управления | 1979 |
|
SU857931A1 |
| Устройство для формирования сигнала управления | 1977 |
|
SU734612A1 |
| Система оптимального управления с моделью объектами второго порядка | 1980 |
|
SU888071A1 |
| Устройство для автоматического управления | 1980 |
|
SU868699A2 |
| Цифровая система управления | 1984 |
|
SU1229724A1 |
| ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР | 1994 |
|
RU2113005C1 |