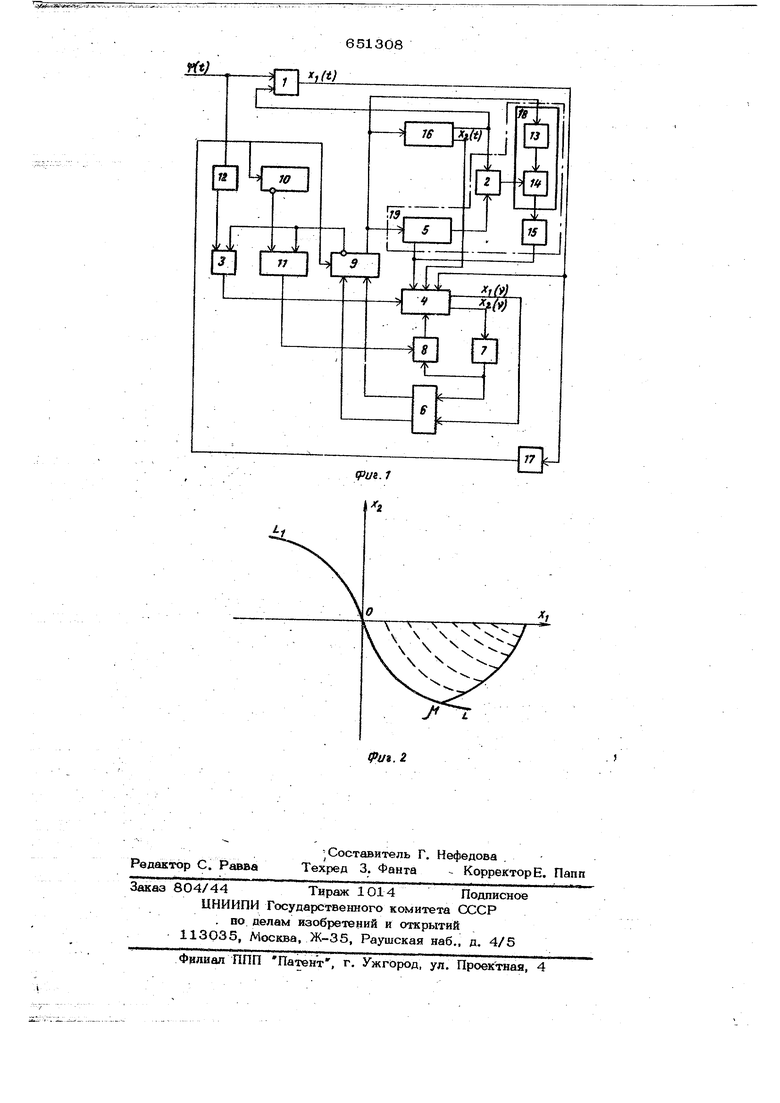
(54) СИСТЕМА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ ВТОРОГО ПОРЯДКА 3 -----сут матора и первому выходу объекта, в выход - ко второму входу 6ло1кё сам настройки, выход которого через интегратор подключен ко вторым входам первой и второй моделей, а третий вхо первой модели подключен ко второму выходу объекта . . .Известная система обладает низкими характеристиками по точности и быстро действию. Целью настоящего изобретения является повышение точности и быстродействия системы. Поставленная цель достигается тем, что в системе установлены первый функциональный преобразователь и третий сумматор, первый вход которого че рез первый функциональный преобразователь подключенко второму входу перво сумматора, второй вход непосредственн подключен к первому выходу первого триггера, а выход - к четвертому входу первой модели, пятый вход которой подключен к выходу первого сумматора а второй выход первого триггера подключён ко входу объекта, а блок самонастройки содержит последовательно соединенные агорой функциональный пре образователь и блок умножения. Блок-схема системы представлена на фиг, 1; на фиг. 2 представлен фазовый портрет системы. Система содержит 1, 2, 3-первый, вт рой, третий сумматоры, 4, 5-первую и вторую модели, 6-блок сравнения, 7нуль-орган, 8 - блок управления первой моделью, 9, 10 - первый и второй триггеры ,11- блок Эквивален ность 12,13 - первый и второй функциональные преобразователи, 14 - блок умнбзкения, 15 -интегратор, 16 - , объект, 17 - блок начальных .-уставок, 18 - блок самонастройки, 19 - контур идентификации, у (t) -задающее воздействие, Kj(t ),X2{t ) - фазовые координаты объекта, Х(),Х2{ ) фазовые координаты первой модели. Задачей оптимальной по быстродействию системъ управления объектами . второго порядка является формирование последовательности оптимальных управлений вида ilJn,ax тах максимальное значение управл5аощих воздействий как функции фазовых координат объекта управления Xi ( i ), Х2.( t ). При этом систем реализуется нелинейный закон управления, определенный на фазовой плоскости 8 уравнением линии переключения. Поскольку кусочно-линейная илр кусочно-нелинейная апроксимация функции переключения сопряжена со значительными погрешностями, то для реализа1ши закона управления может быть использована модель, многократно и в быстром времени реализующая уравнения движения объекта. Когда параметры объекта неизвестны, то непосредственно построение линии переключения невозможно и для реализации оптимального по быстродействию алгоритма управления необходимо идентифицировать объект. Предлагаемая система работает следующим образом. Изменение значений . задающего воздействия Ц) { t ), поступающего на вход сумматора 1, или изменение параметров объекта 16 приводит к появлению на его выходе отклонения регулируемой переменной X j { t ). По закону X { t ) блок начальных уставок 17 производит выбор значения упрабления на начальном участке движе - ния объекта 16, чтд обеспечивается начальной установкой триггера 9. При этом триггер 10 переводится в т6 же состояние, что и триггер 9, а логический блок Э даивалентность 1 выдает сигнал 1 на вход блока управления моделью 8. Зго вь зываег, с одной стороны, перевод модели 4 в режим периодического решения, а, с другой стороны, выдачу управления 11 -sign ) на входы объекта 16, второй модели 5 и функционального преобразователя 13, входящего в состав блока самонастройки 18 контура идентификации 19, что вызывает изменение выходных сигналов объекта 16 и модели 5, Выходные сигналы объекта 16 и модели 5 пост5пг1ают на входа сумматора 2 для формирования сигнала рассогласования ( t ), выз- ванног о изменением параметров объекта 16. Сигнал ( t ) с выхода сумматора 2 подается на одИн из входов блока умножения 14, на другой вход которого поступает выходной сигнал функциональнцго преобразователя 13, структура которого . определяется по методу вспомогательного оператора. Выходной сигнал блока умножения 14, определяющий скорость изменения переменного параметра объекта 16, посредством интегратора 15 подается на входы первой и второй моделей 4,5. При этом на вход первой модели с сумматора 3 поступает сигнал управления 0- o определяется видом задающего воздействия ц; { t ) и формируется при прохождении Ц) (t ) Через функциональный преобразователь 2 (для объектов второго порядка Ц1 ({) представляется любой кривой не выше второго порядка). Изменение переменньи объекта 16 i ) и Х2{ t ) поступают как начальнъ1е урловия в модели 4. Как тольжо координата модели 4 V ), где -t/p(U iмасштаб времени, образуемая в процессе решения моделью 4 уравнений дви-, жения объекта 16, принимает нулевое значение, нуль-орган 7 вырабатьшает сигнал, поступающий на бходы блока управления моделью 8 и блока сравнения 6. При этом блок сравнения 6 определяет знак переменной X ( ), поступающей на его другой вход, и возбуждает, в зависимости от значения ( t ), один из входов триггера 9. Поскольку до достижения изображающей точкой объекта 16 линии переключения знак переменной X i ( t не меняется, то начальное значение управления U сохраняется неизменным. В то же время сигнал, поступающий с нуль-органа 7 на блок управления моделью 8, вызьюает изменение режима работы модели 4, переводя ее в {южим задание начальный условий. После этого весь режим работы системы повторяется до тех пор, пока при возбуждении нуль-органа 7 блок срав нения 6 не определит изменения знака переменной Х( -9 )- при Х2()0 (процесс настройки ааканчивается до этого момента). Это будет свидетельствовать о прохождении траектории ото бражающей точки модели 4 через начало координат системы. При этом триг гер 9 изменит свое состояние, а ,и управление IJ , что определяет движение отображающей точки по линии переключения Ц О (или , в з фисимости от начальных ус1 1овий фиг. 2). Поскольку состояния триггеров 9 и 10 в этом случае не совпадают, то логический блок Эквивалентностьостанавливает решение на модели 4. Движение объекта 16 при подобном управлении происходит по траектории, обеспечивающей минимальную длительность процесса управления. Формула изобретен и, я 1. Система оптимального управления объектами второго порядка, содержащая О8 последовательно соединенные первый сумматор и блок начальных уставок, выход которого через первый и второй триггеры соединен с соо-геетствующими входами блока ЭквивалентностьТ вы ход которого подключен к первому входу блока управления первой моделью, второй вход которого подключен к выходу нуль-органа и к первому входу блока сравнения, а выход - к первому входу первой модели, выходы которой соединены со входом нуль-органа и вторым входом блока сравнения,выходы которого подключены к соответствующим входам первого триггера, и вторую модель, подключенную входом ко входам объекта и блока самонастройки, а выходом - к одному из входов второго сумматора, другой вход которого подключен к первому входу первого сумматора и первому выходу объекта, а выходко второму входу блока самонастройки, выход которого через интегратор подключен ко вторым входам первой и второй моделей, а третий вход первой модели подключен ко второму выходу объекта, отличающаяся тем, что, с целью псйвышения точности и быстродействия системы, в ней установлены первый функциональнь1й преобразователь и третий сумматор, первый вход которого через функциональный преобра-.. зователь подключей ко второму входу первого сумматора, второй вход к первому выходу первого триггера, а выход - к четвертому входу пе{жой модели, пятый вход которой подключен к выходу первого юумматОра, а второй выход первого триггера подключен ко входу объекта.. 2,. Система оптимального управления объектами второго порядка по п. 1, о т л и ч ю щ а я с я тем, что блок самонастройки содержит последовательно соединенные второй функциональный преобразователь и блок умножения. Источники информации, принятые во внимание при экспертизе 1. Заявка № 1934939/18-24, кл. Q 05 В 13/02, 18.06.73, по ко торой принято положительное решение о выдаче авторского свидетельства. 2.Авторское свидетельство СССР (по заявке № 24О5О48/18-2.4), кл. Q 05 В 13/02, 17.09.76. 3.Авторское свидетельство СССР (по заявке № 2387387/18-24) кл. Q 05 В 13/02, 21.07.76.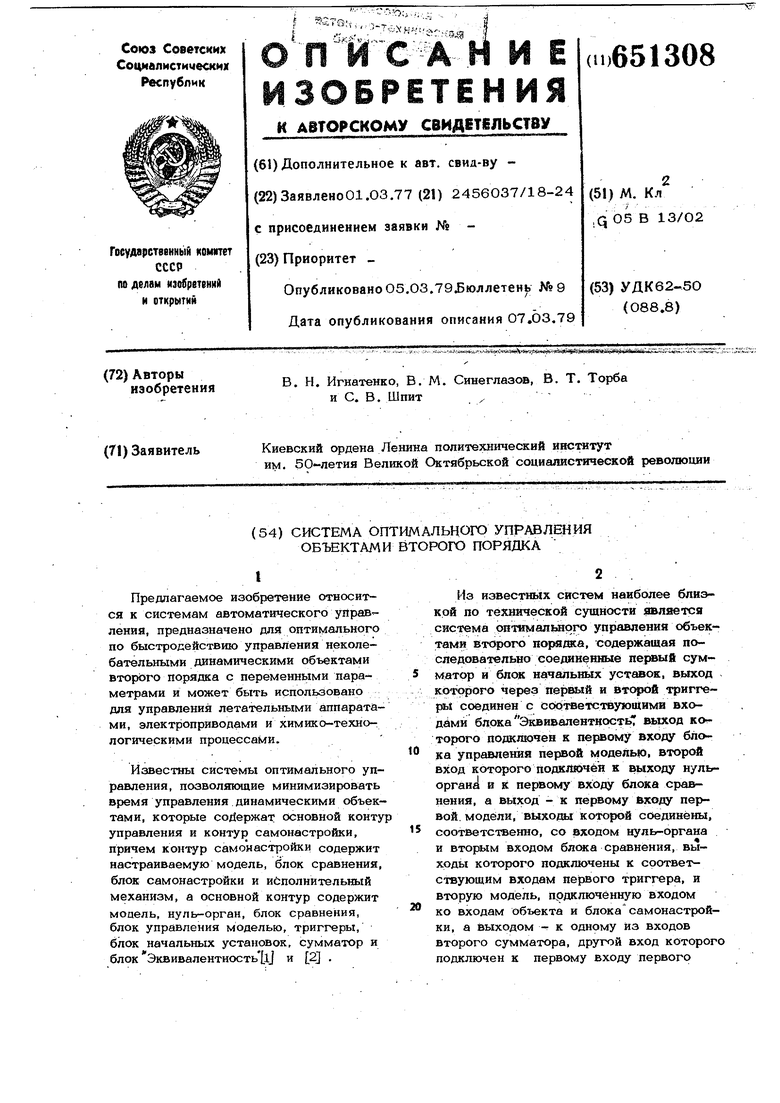

| название | год | авторы | номер документа |
|---|---|---|---|
| Система оптимального управления с моделью объектами второго порядка | 1980 |
|
SU888071A1 |
| Система оптимального управления объектами второго порядка | 1981 |
|
SU954934A2 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU798704A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU805250A1 |
| Система оптимального управления колебательными объектами произвольного порядка | 1983 |
|
SU1092467A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU813359A1 |
| Система оптимального управления объектами второго порядка | 1978 |
|
SU744451A2 |
| Устройство для оптимального управления колебательными объектами второго порядка | 1973 |
|
SU499553A1 |
| Система оптимального управления объектами второго порядка | 1976 |
|
SU643833A1 |
| Управляющее устройство | 1983 |
|
SU1161916A1 |