I
Изобретение относится к системам автоматического управления, предназначено для оптимального по быстродействию управления колебательными динамическими объектами с переменными пара-. метрами и может быть использовано для управления летательными аппаратами и различными технологическими процессами.
Известны системы оптимального управления Cll 1 позволяющие минимизировать время управления динамическими объектами, которые содержат основной контур управления и контур самонастройки. Контур самонастройки содержит настраиваемую модель, блок сравнения, блок управления моделью, триггеры, блок начальных уставок, сумматор и блок эквивалентное ти.
Из известных систем наиболее близкой по технической сущности к изобретению является система оптимального управления объектами второго поряд, ка 12 3 первый вход модели которой
соединен с выходом интегратора, второй вход - с выходом первого триггера, входом первого функционального преобразователя и входом объекта, первый выход которого подключен через блок начальных уставок к установленному входу первого триггера, а также ко входу первого сумматора, второй вход которого соединен с выходом модели, а выход - подключен ко входу блсжа умноже10ния, второй вход которого соединен с выходом первого функиионального преобразователя, а выход - со входом интегратора, выход второго функционального преобразователя, соединенного вхоISдом со входом первого блокэ сравнения, через второй блок сравнения, соединен С первым входом первого ключai второй вход которого подключен к выходу третьего блока сравнения, первым входам пер20вого и второго блоков эквивалентности, а выход соединен со входом блока памяти, выход которого подключен ко второму входу первого блока эквивалентности.
соединенного выходом с первым входом второго ключа, второй вход которого подключен к первому входу второго сумматора, на третий вход подается произвольный ненулевой сигнал, а выход подключен ко входу нулЕз-органа, соединенного выходом с первыми входами третьего и четвертого ключей, соединенных вторыми входами с первым и вторым выходами третьего блока эквивалентности, один вход которого через второй блок зквивалентности подключен, к выходу первого блока сравнения, а второй вход через четвертый блок сравнения подключен к первому выходу объекта и входу четвертого блока эквивалентности, второй вход которого соединен с выходом первого блока сравнения, а выход - с первым входом пятого ключа, подключенного вторым входом через инвертор ко второму выходу объекта, а выходом ко второму входу второго сумматора, выход которого соединен со входом пятого блока сравнения, подключенного выходами ко входу второго триггера, выход которого соединен со входом третьего блока сравнения, а установочный вход третьего триггера соединен с установочным входом первого триггера, подключенного входами к выходу третьего и четвертого ключей.
Известная система обладает недостаточной точностью из-за использования для целей прогнозирования аналоговой модели,
Целью изобретения является повышение точности работы системы при сохранении быстродействия.
Поставленная цель достшаетмя тем, что в предложенной системе установлены шестой, седьмой ключи, первое и второе арифметическое устройства (АУ), блок вычисления коэффициентов рекурренных соотношений, аналого-цифровой преобразователь (АИЛ), первый вход которого соединен с выходом интегратора, второй и третий соответственно - с первым и вторым выходами объекта, четвертый - с выходом второго триггера, а первый выход - со входом блока вычисления коэффициентов рекуррентных соотношений, первый, второй, третий выходы которого подключены к соответствующим входам первого АУ, четвертый, пятый и шестой выходы - к первому, второму, третьему входам второго арифметического устройства, соединенного четвертым входом с четвертым входом первого АУ, четвертым выходом AU
пятым входом - с выходом шестого ключа, пятым входом первого АУ, шестым входом - с шестым входом первого АУ, выходом седьмого ключа, подключенного первым входом ко второму выходу АЦП, вторым входом - к выходу первого АУ. и входам первого блокасравнения и второго функционального преобразователя, третьим входом - к входу нуль-органа, вторым входам третьего и четвертого ключей и третьему входу шестого ключа, первый вход которого соединен с третьим выходом АЦП, а второй вход - с выходом второго АУ и вторым входом второго ключа.
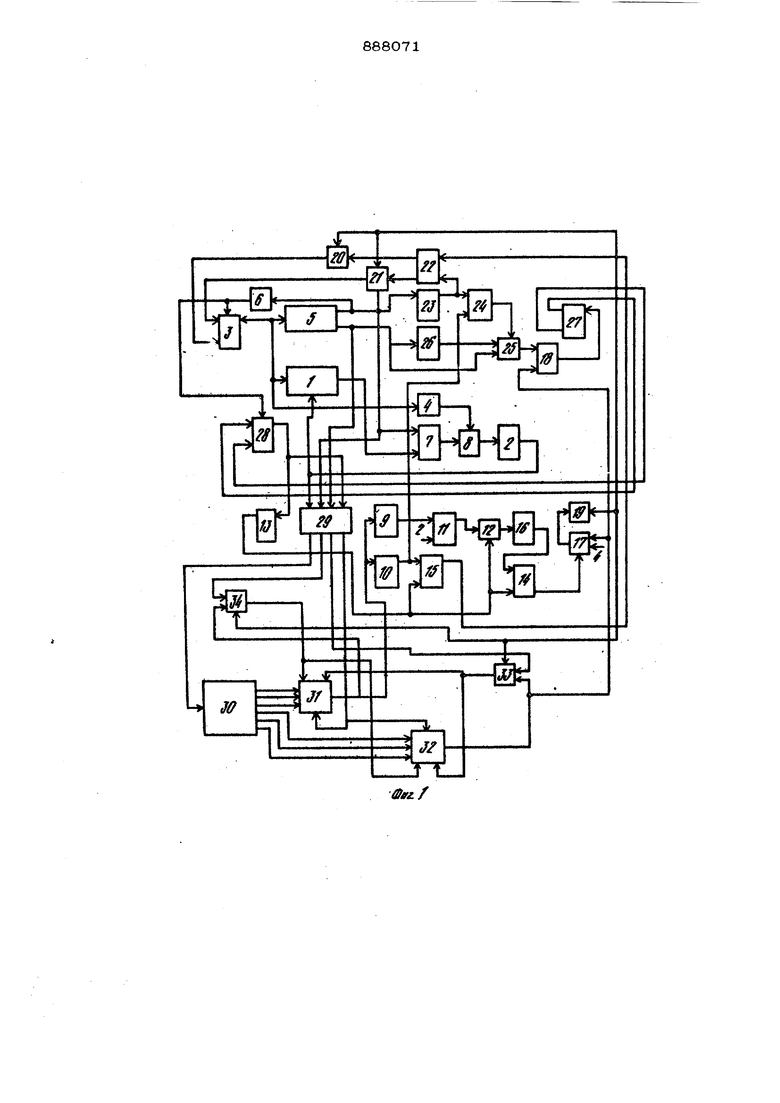
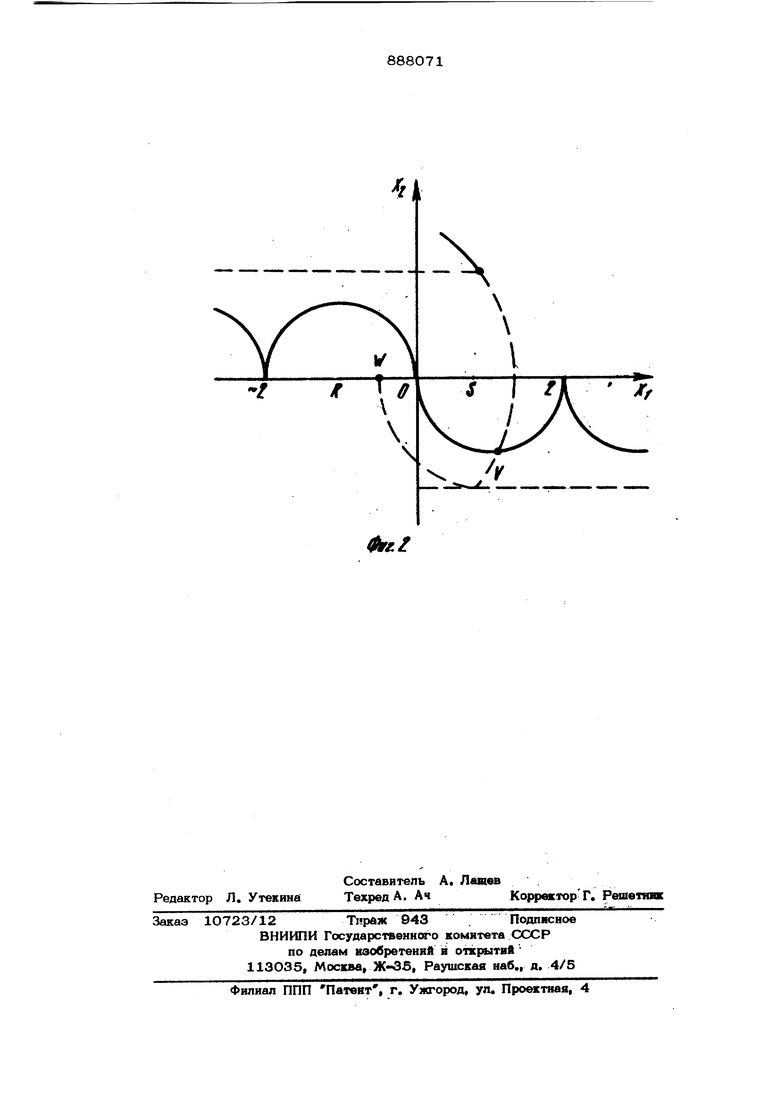
На фиг. 1 представлена структурная схема системы оптимального управления объектами второго порядка; на фиг
2схема переходного процесса.
Система оптимального управления объектами второго порядка содержит модель 1, первый вход которой соединен с выходом интегратора 2, второй вход - с выходом первого триггера 3, входом первого функционального : . преобразователя 4 и входом объекта 5, первый выход которого подключен через блок начальных установок 6 к установочному входу триггера 3, ко входу первого сумматора 7, второй вход которого соединен с выходом модели 1, а выход подключен ко входу блока умножения 8, второй вход которого соединен с выходом преобразователя 4, а выход со входом интегратора 2. Выход второго функционального преобразователя 9,
соединенного со входом первого блока сравнения 10, через второй блок сравнения 11 соединен с первым входом первого ключа 12, второй вход которого подключен к выходу третьего блока сравнения 13, первым входом первого 14 и второго 15 блоков эквивалентности, а выход соединен со входом блока памяти 16, выход которого подключен ко второму входу блока эквивалентности 14, соединенного выходом с первым входом второго ключа 17, второй вход которого подключен ко входу второго сумматора 18, на третий вход подается произвольный ненулевой сигнал, а выход подключен ко входу нуль-органа 19, соединенного выходом с первыми входами третьего 20 и четвертого 21 ключей, соединенных вторыми входами с первым и вторым выходами третьего блока эквивалентности 22, один вход которого через второй блок эквивалентности 15
(подключен к выходу блока сравнения 1О, а второй вход через четвертый блок сра нения 23 подключен к первому выходу объ та 5 и входу четвертого блока эквивале ности 24, второй вход которого соедине с выходом блока сравнения 10, а выход с первым входом пятого ключа 25, подключенного вторым входом через инвертор 26 ко второму выходу объекта 5, а выходом - ко второму входу сумматора 18, выход которого соединен со входом пятого блока сравнения 27, подключенного выходами ко входу второго триггера 28, выход которого соединен со входом блока сравнения 13, а установочный вход второго триггера 28 соединен с установочным входом триггера 3, подключенного входами к выходу третьего 20 и четвертого 21 ключей. Первый вход Alin 29 соединен с выходом интегратора 2, второй и третий соответственно - с первым и вторым выходами объекта 5, четвертый - с выходом триггера 28, а первый выход - со входом блока вычисления коэффициентов рекуррентных соотношений ЗО, первый, второй, третий выходы которого подключены к соответствующим входам первого АУ 31, четвертый, пятый, шестой выходы - к первому, второму, треть му входам второго АУ устройства 32, соединенного четвертым входом с четвертым входом АУ 31, четвертым выходом А11П 29, пятым входом - с выходом шестого ключа 33, пятым входом АУ 31, шестым входом - с шестым входом АУ 31, выходом седьмого ключа 34, подключенного первым входом ко второму AUn 29, вторым входом к выходу АУ 31 первому входу ключа 17, третьим входом - ко входу преобразователя 9, третьему входу шестого ключа 33, первый вход которото соединен с третьим выходом АИЛ 29, а второй вход - с выходом АУ 31, выходом нуль-органа 19, На фиг. 2 представлен оптимальный по быстродействию переходной процесс, где приняты следующие обозначения : X(t X2(fc) координаты объекта, Х, VJ выходные сигналы первого и второго АУ соответственно. Задачей оптимальной по быстродействию системы управления колебательными объектами является формирование последовательности оптимальных управлений максимальное значение управляющих воздействий как функции фазовых координат объекта управления X(-fc), О:). При этом система реализует нелинейный закон управления, определенный на фазовой плоскости уравнением линии переключения. Поскольку кусочно-линейная или кусочнонелинейная аппроксимация функции переключения сопряжены со значительными погрешностями, то для реализации закона управления могут быть использованы рекуррентные соотношения (&)CAiU),U)(-i) -г (Д)САг(л)и4-В2(д)х1|4Х(2)1 на основании которых можно реализовать уравнение движения объекта. Коэффициенты А.(Д), В(Д), С(Д), А(Л), Е(Д), ) являются линейными функциями коэффициентов объекта, шага прогнозирования Д. Когда параметры объекта неизвестны, то непосредственноепостроении линии переключения невозможно и для реализаш1и оптимального по быстродействию алгоритма управления необходимо иденти4ш1шровать объект. При sTovi управляющее воздействие, подаваемое на объект, выбирается из свойств траектории, определяемой выходными сигналами первого и второго АУ в окрестности нуля где У - текущее значение координаты объекта У (fe) ; yiK (} - значения выходного сигнала первого АУ X 1 и управляющего первого - г. . воздействия, подаваемого на . него в момент Х Oi случае когда последняя перемена 1ака управляющего вoздeйcт - . ВИЯ ид произошла в интервале . Управляющее воздействие, подаваемое на входы АУ, определяется следующим образом: д SigfhExl-ea igir i 3 (4 гле X a. - текущие координатът объекта; yjj j4 - текущие координаты перво го и второгоАУ. Система работает следующим образом. Изменение параметров объекта 5 приводит к появлению на его выходе оттслЬ- нения регулируемой переменной По знаку Х ( -{з) блок начальных уставок б производит выбор значения управле ния на первом щаге движения объекта 5, что обеспечивается начальной установкой триггера 3. При этом триггер 13 переводится в то же состояние, что и триггер 3. На вход объекта 5, модели 1 и .функционального преобразователя 4 подается управление UQ - Х-, (t;, что вызывает изменение выходных сигналов объекта 5 и модели 1, Выходные сигналы объекта 5 и модели 1 поступают на входы сумматора 7 для формирования сигнала рассогласования (t), вызванного изменением параметров объекта 5. Сигнал (-t) с выхода сумматора 7 подается на один из входов блока yLЛнoжeния 8, на другой вход которого поступает выходной сигнал преобразователя 4, структура которого определяется по методу вспомогательного оператора. Выходн сигнал блока умножения 8, определяющий скорость изменения переменного параметра объекта 5, посредством интегратора 2 подается на вход модели и через AUn 29 на вход блока вычисления коэффициентов рекуррентных соотношений 30, где определяются коэффициенты А.|(Д), В((А), С(Л), А,2(А), В2(А Са.() являющееся линейными функциями параметров объекта и шага прогнозирования uj которые затем подаются на первый, второй, третий входы АУ 31 32, реализующих рекуррентные соотношения (1) и (2). При этом на блок эквивалентности 2 подаются сигналы с блоков сравнения 10 и 23, соответствующие 1gVlX и GfghXvc В зависимости от сигнала 1 или О на выходе блока эквивалентности 24 через ключ 25 на вход сумматора 18 поступает сигнал -Xj. или )(, на другой вход которого поступает значение Х В зависимости от знака выходного сигнала сумматора 18 посредством блока сравнения 27 и триггера 28 реализуется управление (4), подаваемое через АШ 29 на входы АУ 31, 32. Изменение переменных объекта 5 У.(€) и X2. через АШ 29, ключи 33, 34 поступают на входы АУ 31, 32, , До момента .попадания / XIf / (абсолют ная величина Х. образуется вследствие прохождения величины XI через преобразователь 9) 6 зону, соответствующую 2 на выходе блока сравнения 11 появляет . В резупьттте через ключ 12 с бло 8 18 ка сравнения 13 проходит сигнал 1 или О соответствующий Од , который запоминается в блоке памяти 16 и подается на вход блока эквивалентности 14. Поскольку на его-второй вход подается тот же сигнал, то инверсном выходе блока эквивалентности 14 Появляется О. В результате через ключ 17 проходит ненулевой произвольный сигнал, и на выходе нуль-органа 19 вырабатьтается нулевой сигнал, ключи 20, 21 закрыты, триггер 3 остается в прежнем состоянии, ключи 34, 33 пропускают соответственно выходные сигналы АУ 31 и 32, быстродействие которых за счет выполнения, операции суммирования высокое. В результате реализуются рекуррентные соотношения (1) и (2). В случае попадания в зону, соответствующую 2, при наличии в ней переключения управляк щего воздействия (J на инверсном выходе блока эквивалентности .14 появляется 1. В результате через ключ 17 на вход нуль-органа 19 поступает сигнал Х1| . Если Xi О, то нуль-орган 19 вырабатывает сигнал, открывающий ключи 34, 33 для прохождения соответственно сигналов объекта Х2 ® ключи 20 и 21 - для прохождения сигналов с блока сравнения 22, на выходе которого реализуется соотношение (З). В результате триггер 3 устанавливается в состояние, соответствующее соотношению (3). После этого режим работы системы повторяется. Движение объекта 5 при подобном управлении проис одит по траектории, обеспечивающей минимальную длительность процесса управления. Результаты исследований, продетнных на макете системы оптимального управления показали, что по сравнению с прототипом удалось повысить точность реализации процесса управления на 25%; при сохранении быстродействия. Формула изобретения Система оптимального управления с моделью объектами второго порядка, первый вход модели которой соединен с выходом интегратора, второй вход - с выходом первого триггера, входом первого функционального преобразователя и входом объекта, первый выход которого подключен через блок начальных уставок к .установочному входу первого триггера, а также к входу первого сумматора, вто рой вход которого соединен с выходом модели, а выход подключен к входу блок умножения, второй вход которого соедине с выходом первого функционального преобразователя, а выход - со входом интегратора, при этом выход второго функционального преобразователя, соединенно го входом с входом первого блока сравнения, через второй блок сравнения соединен с первым входом первого ключа, второй вход которого подключен к выходу третьего блока сравнения, первым входам первого и второго блоков эквивалентности, а выход соединен с входом блока памяти, выход которого подключен к второму входу первого блока эквивалентности, соединенного выходом с первым входом второго ключа, второй вход которого подключен к первому входу вто рого сумматора, а выход- к входу нульоргана, соединенного выходом с первыми входами третьего и четвертого , соединенных вторыми входами с пер вым и вторым выходами третьего блока эквивалентность, один вход которого через второй блок эквивалентности подключен к выходу первого блока сравнени а другой вход через четвертый блок срав нения подключен к первому выходу объек те и входу четвертого блока эквивалентности, второй вход которого соединен с выходом первого блока сравнения, а выход - с первым входом пятого ключа, подключенного вторым входом через инвертор к второму выходу объекта, а выходом - ко второму входу второго сумматора, выход которого соединен со входом пятого блока сравнения, подключенного выходами ко входу второго триггера, выход которого соединен со входом третьего блока сравнения, установочный вход третьего триггера соединен с установочным входом первого триггера, подключенного входами к выходу третьего и четвертого ключей, отличающаяся тем, чтоо, с целью повышения точности работы системы, 110 в ней установлены шестой и седьмой ключи, первое и второе арифметические устройства, блок вычисления коэффициентов рекуррентных соотношений, аналого-цифровой преобразователь, первый вход которого соединен с выходом интегратора, второй и третий - соответственно с перюым и втирым выходами объекта, четвертый - с выходом второго триггера, а первый выход - со входом блока вычисления коэффициентов рекуррентных соотношений, первьтй, второй и трети выходы которого подключены к соответствующим входам первого а| Я1фметического устройства, чет- вертый, пятый и шестой выходы соот ветственно к первому, второму и третьему входам второго арифметического устройства, соединенного четвертым входом с четвертым входом первого арифметического устройства и четвертым выходом А1Я1, пятым входом с выходом шестого ключа и пятым входом первого арифметического устройства, шестым входом с шестым входом первого apH(jweTH4ecKoro устройства и выходом седьмого ключа, подключенного первым входом к второму выходу Alin, вторым входом - к выходу первого арифметического устройства и входам первого бпсжа сравнения и второго функииональнсяо преобразователя, третьим входом - к входу нуль-органа, вторым входам третьего и четвертого ключей и третьему входу шестого ключа, первый вход которого соединен с третьим выходом AUn, а второй вход - с выходом второ- го арифметического устройства и вторым входом второго ключа. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетелЕзСтво СССР по заявке № 2405048/24, кл. & Об В 13/О2, 1979. 2. Авторское свидетельство СССР по заявке М 27О639О/24, кл. 05 В 13/О2, 1979 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU798704A1 |
| Система оптимального управления объектами второго порядка | 1981 |
|
SU954934A2 |
| Система автоматического регулирования одностадийным циклом мокрого измельчения | 1982 |
|
SU1255208A1 |
| Система оптимального управления объектами второго порядка | 1980 |
|
SU920634A2 |
| Множительно-делительное устройство | 1982 |
|
SU1088016A1 |
| Устройство для решения систем дифференциальных уравнений | 1977 |
|
SU714406A1 |
| Устройство для контроля линейного объекта управления | 1989 |
|
SU1753454A1 |
| Устройство для моделирования зрительной аккомодации | 1980 |
|
SU955119A1 |
| Система оптимального управления колебательными объектами произвольного порядка | 1983 |
|
SU1092467A1 |
| Устройство для моделирования вентильного преобразователя | 1981 |
|
SU968829A1 |