Изобретение относится к области автоматического регулирования и управления и представляет собой устройство для управления угловыми движениями судов и летательных аппаратов.
Известны устройства, обеспечивающие оптимальное по быстродействию управление астатическими системами стабилизации второго порядка с сервоприводом постоянной скорости, содержащие датчик стабилизируемого параметра, сумматоры, поляризованное реле, серводвигатель и блок пер емножения, выход которого связан с одним из входов сумматора, а вход-с выходом серводвигателя.
В известных устройствах управление оптимально только при точном соответствии коэффициентов передачи электрических цепей коэффициенту усиления объекта.
В реальной системе, например, при стабилизации курса корабля или летательного аппарата, величина коэффициента К изменяется (в зависимости от скорости) в щироких пределах, и поэтому переходные процессы становятся колебательными или протекают в скользящем режиме. Чтобы обеспечить оптимальное по быстродействию протекание переходных процессов при любых значениях К, вводят самонастройку электрических коэффициентов передачи. Введение самонастройки усложняет систему и снижает ее надежность.
Цель изобретения-простое и надежное устройство, не требующее перенастройки в процессе эксплуатации и обеспечивающее оптимальное по быстродействию протекание переходных процессов при любом значении коэффициента к усиления объекта управления.
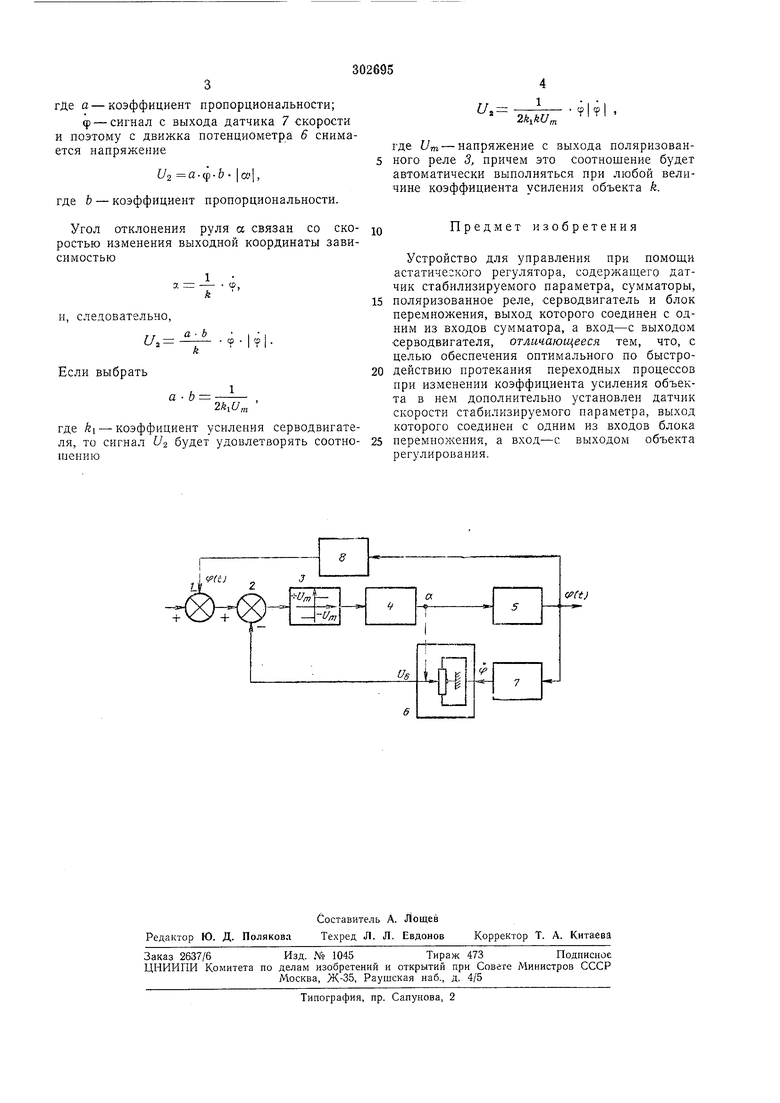
Схема предлагаемого устройства показана на чертеже, где 1-сумматор; 2-сумматор,
учитывающий сигнал нелинейной коррекции в соответствии с линией переключения; 3-поляризованное реле, управляющее двигателем привода руля; 4-серводвигатель; 5-объект управления с переменным коэффициентом
усиления; &-блок перемножения (потенциометр, механически связанный с рулем); 7- датчик скорости стабилизируемого параметра (скоростной гироскоп); S-датчик стабилизируемого параметра (свободный гироскоп).
Напряжение, подаваемое на потенциометр 6, связанный с рулем и осуществляющий умножение этого напряжения на модуль угла отклонения руля, получается с помощью скоростного (несвободного) гироскопа. Напряжение на выходе скоростного гироскопа пропорционально скорости изменения выходной координаты:
гДе а - коэффициент пропорциональности;
Ф - сигнал с выхода датчика 7 скорости и поэтому с движка потенциометра 6 снимается напряжение
t/2 а-ф-Ь- |а|,
где b коэффициент пропорциональности.
Угол отклонения руля а связан со скоростью изменения выходной координаты зависимостью
а HZ
и, следовательно,
т го. Ь 1 I
и - -- ср I 1
Если выбрать
а . й
,
где А - коэффициент усиления серводвигателя, то сигнал Uz будет удовлетворять соотношению
а
I Т I
2kikUn
где Um - напряжение с выхода поляризован5 ного реле 3, причем это соотношение будет автоматически выполняться при любой величине коэффициента усиления объекта k.
Предмет изобретения
Устройство для управления при помощи астатического регулятора, содержагцего датчик стабилизируемого параметра, сумматоры,
поляризованное реле, серводвигатель и блок перемножения, выход которого соединен с одним из входов сумматора, а вход-с выходом серводвигателя, отличающееся тем, что, с целью обеспечения оптимального по быстродействию протекания переходных процессов нри изменении коэффициента усиления объекта в нем дополнительно установлен датчик скорости стабилизируемого параметра, выход которого соединен с одним из входов блока
перемножения, а вход-с выходом объекта регулирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1972 |
|
SU356625A1 |
| Система управления | 1981 |
|
SU996995A1 |
| АВТОМАТ УСТОЙЧИВОСТИ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1826781A1 |
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2009 |
|
RU2391694C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫТЯГИВАНИЕМ ВОЛОКНА ПРИ ФОРМОВАНИИ | 2003 |
|
RU2237759C1 |
| Поисковый регулятор для резонансной настройки контура нулевой последовательности сети | 1982 |
|
SU1080231A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576594C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| Адаптивная система с эталонной моделью для управления летательным аппаратом | 2016 |
|
RU2647405C1 |
4- ч
