Изобретение относится -к механизации перегрузочных работ, в частности к грузозахватным средствам, используемым в лесной промышленности при перегрузке пачек круглого леса.
Известны захватные устройства к грузоподъемным механизмам, включающие траверсу в виде рамы с шарнирно сочлененными с ней поворотными челюстями, управляемыми горизонтально расположенными силовыми цилиндрами с автономным приводом и механизмом -поворота.
Предлагаемое устройство отличается от известных тем, что механизм поворота смонтирован внутри рамы, снабженной центральной втулкой и упорным подшипником, в которых шарнирно закреплена ось с шестерней, взаимодействующей с рейкой, выполненной за одно целое с подвижным корпусом силового цилиндра механизма поворота.
При таком выполнении механизма поворота уменьшается габарит захватного устройства по высоте и тем самым расширяется возможность его использования, например, в помещениях с ограниченной высотой, а также обеспечивается надежная работа устройства.
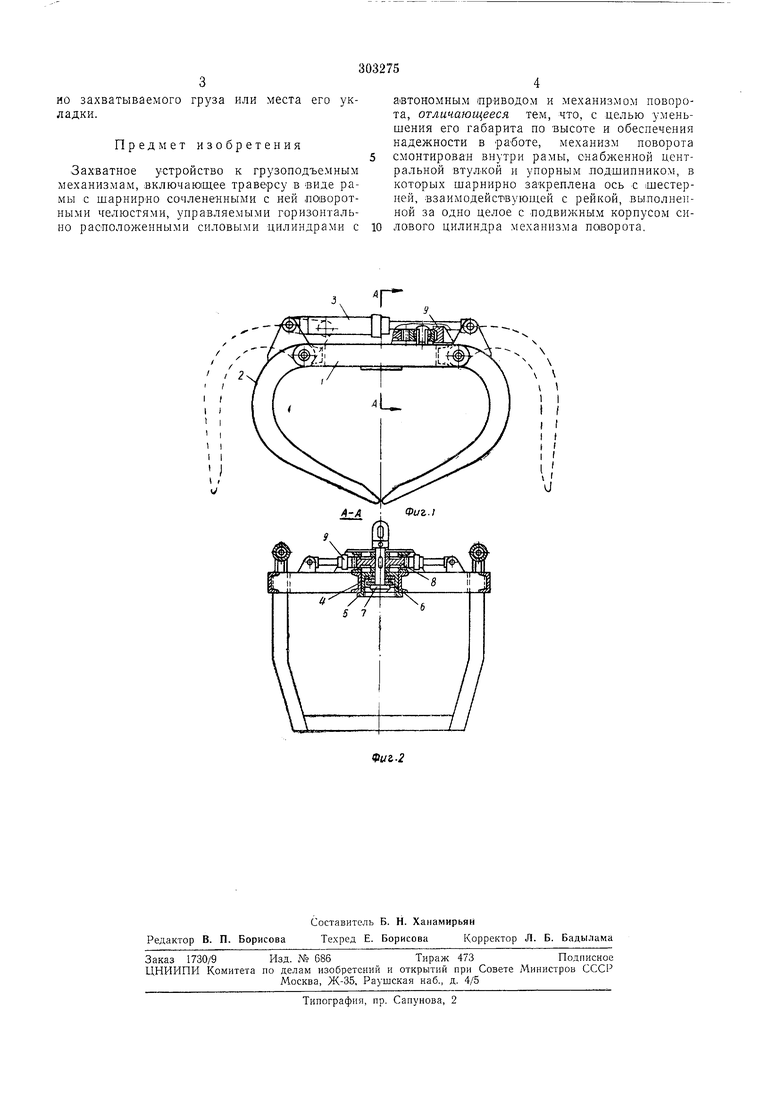
Основным несущим элементом устройства является траверса, выполненная в виде рамы 1 с челюстями 2, которые управляются горизонтально расположенными силовыми цилиндрами 3 с автономным приводом (на чертежах не показан) и механизмом поворота 4. Последний смонтирован внутри рамы 1, снабженной центральной втулкой 5 и упорным подщипником 6, в которых шарнирно закреплена ось 7 с шестерней 8, взаимодействующей с рейкой 9, выполненной за одно целое с подвижным корпусом силового цилиндра механизма поворота. Управляется захватное устройство нелосредственно с пульта управления, например из кабины крановщика. Устройство работает следующим образом. В полости силовых цилиндров 3 нагнетается рабочая среда. Штоки этих цилиндров, перемещаясь, взаимодействуют с поворотными челюстями, соответственно закрывая их или открывая. При подаче рабочей среды в силовой цилиндр механизма поворота корпус цилиндра вместе с зубчатой рейкой перемещается по штоку и взаимодействует с шестерней 8, разворачивая захватное устройство в заданную сторону, так как рама 1 подвижно закреплена на оси 7. Этим достигается точная ориентация чено захватываемого груза или места его укладки.
Предмет изобретения
Захватное устройство к грузоподъемным механизмам, включающее траверсу в виде рамы с шарнирНО сочлененными с ней поворотными челюстями, управляемыми горизонтально расположенными силовыми цилиндрами с
автономным приводом и механизмом поворота, отличающееся тем, что, с целью уменьшения его габарита по высоте и обеспечения надежности в ра-боте, механизм поворота смонтирован внутри рамы, снабженной центральной втулкой и упорным лодшинником, в которых шарнирно закреплена ось с шестерней, взаимодействующей с рейкой, вылолненной за одно целое с подвижным корпусом силового цилиндра механизма поворота,
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство к грузоподъемным механизмам | 1979 |
|
SU870340A2 |
| ГИДРАВЛИЧЕСКИЙ ГРЕЙФЕР | 2005 |
|
RU2301191C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ДЛИННОМЕРНЫХ ГРУЗОВ | 1972 |
|
SU343939A1 |
| Устройство для отделения листовых заготовок от стопы | 1980 |
|
SU978987A1 |
| Захватное устройство для длинномерных изделий | 1988 |
|
SU1731718A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Грейфер | 1981 |
|
SU1031875A1 |
| Устройство для отделения плоской заготовки от стопы и подачи ее к обрабатывающей машине | 1983 |
|
SU1098623A1 |
| Гидравлический грейфер | 1980 |
|
SU899452A1 |
| Устройство для отделения верхнего листа от стопы и подачи его в зону обработки | 1981 |
|
SU1024139A1 |
I I /
(I
II
II
I(
.;
