Изобрете1Н е относится к системам дг1стаиционного уиравлеиия шахтными механизированными крепями.
Пзвестны устройства для дистанционного управлер1ия гидрораспределителямн, включающие привод с барабаиом, гибкую связь, захват, пульт управления и контроля, датчик положения захвата, натяжное устройство и гидрораспределители с храповым механизмом.
Предлагаемое устройство отличается от нзвестных тем, что захват выполнен в внде усеченного конуса, ось которого совпадает с осью гибкой связи.
При таком выполнеиии устройства повышается его эксплуатационная падежность.
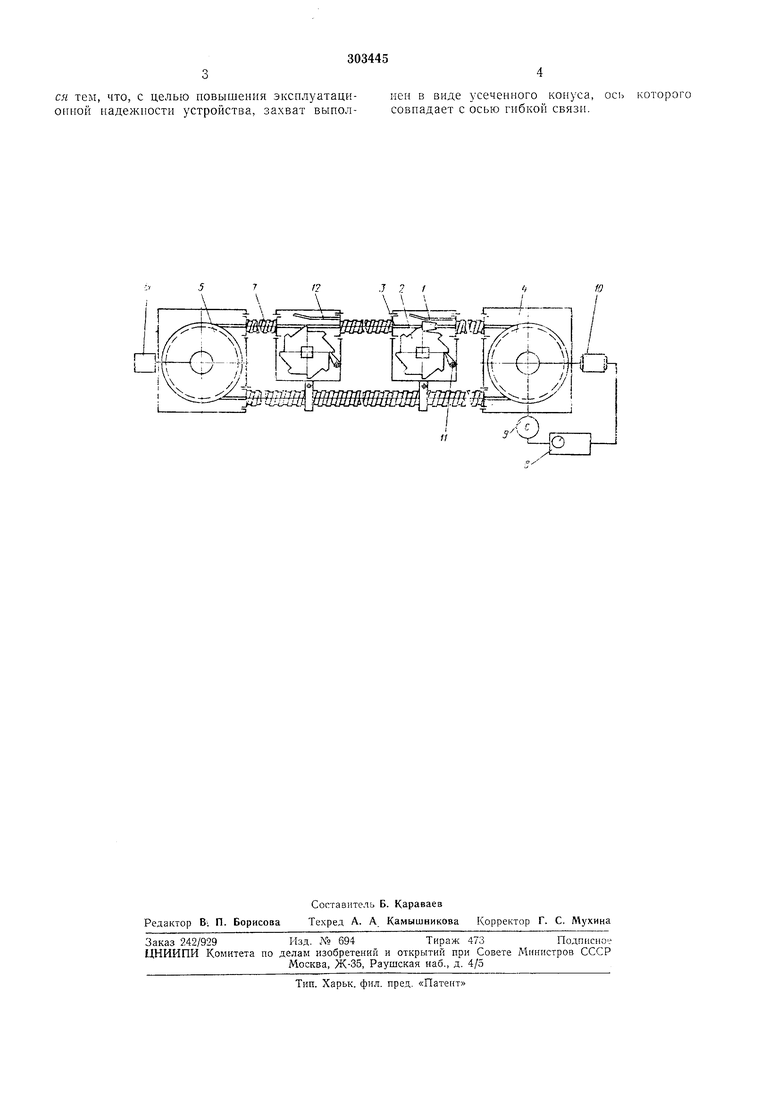
На чертеже изображено оннсывае.мое устройство для дистанционного унравлеиия гидрораспределителями.
Устройство включает захват 7 со скругленными внутренними кромками, гидрораснределители 2 с храповыми механизмами, гибкую связь 3 виде троса, приводной барабан 4, натяжной барабан 5 с автоматическим натяж 1Ь м устройством 6, защитный гибкий кожух 7, пульт управления 8, датчик 9 положения захвата, привод 10, фиксатор 11 и направляющие 12.
вод, ц гибкая связь с захватом перемещается по скосам храповых колес. Как только захват подходит к заданному гидрораспределителю, датчик на пульте указывает его помер, и онератор останавливает двпженне. При реверсиpoBain-ij движения захват, воздействуя на храповое колесо, поворачивает его на одну позицию. Таким образом, захват, совершая возвратно-поступательное двнже1И1е, осуществляет заданное управление выбранным гидрораспределителем. По завершении необходимого переключення захват нереводптся к следующему гидрорасиределителю, и процесс управления повторяется.
Устройство позволяет управлять силовыми гидрораспределителями без промежуточных элементов.
При работе устройства в тяжелых горногеологических условиях гибкая связь с захватом на участках между гидрораспределптелями размещается в гибком кожухе.
Предмет изобретения
Устройство для дистапциониого управления гидрораспределителями, включающее привод с барабаном, гибкую связь, захват, пульт управления и контроля, датчик положения захвата, натяжное устройство и гидрораспредеся тем, что, с целью повышения эксплуатационной наделчпости устройства, захват выполнен в виде усеченного конуса, ось которого совпадает с осью гибкой связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дистанционного управления секцией крепи | 1979 |
|
SU870735A1 |
| Устройство дистанционного управления секциями крепи | 1979 |
|
SU863876A2 |
| Устройство для дистанционного управления многопозиционными гидрораспределителями | 1969 |
|
SU752036A1 |
| Система управления передвижением базы механизированной крепи | 1980 |
|
SU909204A1 |
| ПОЛУАВТОМАТ ДЛЯ КОНТРОЛЯ и РЕГИСТРАЦИИ МОМЕНТА ПРУЖИННОГО ДВИГАТЕЛЯ | 1973 |
|
SU368582A1 |
| Устройство для измерения массы тела в невесомости | 1981 |
|
SU981831A1 |
| ЛЕБЕДКА | 2009 |
|
RU2401242C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И ОГРАНИЧЕНИЯ ГРУЗОПОДЪЕМНОСТИ ЛЕБЕДКИ | 1998 |
|
RU2144901C1 |
| Устройство для натяжения гибкого органа | 1989 |
|
SU1676948A1 |
| Подъемник | 1991 |
|
SU1789483A1 |
i
