Изобретение относится к бесколлекторным двигателям постоянного тока с коммутацией тока в обмотке посредством полупроводниковых триодов, управляемых датчиком положения ротора, вращающаяся часть которого эластично связана с ротором.
Известны электродвигатели такого типа с регулированием скорости путем изменения угла между вектором питающего напряжения и вектором э. д. с. вращения.
Целью предлагаемого изобретения является повыщение надежности и расширение области применения бесколлекторных электродвигателей, регулируемых по указанному принципу.
Для этого вращающаяся часть датчика положения снабжена регулируемы.м тормозным устройством, изменяющим угол между осью управляющих элементов датчика и осью полюсов ротора двигателя.
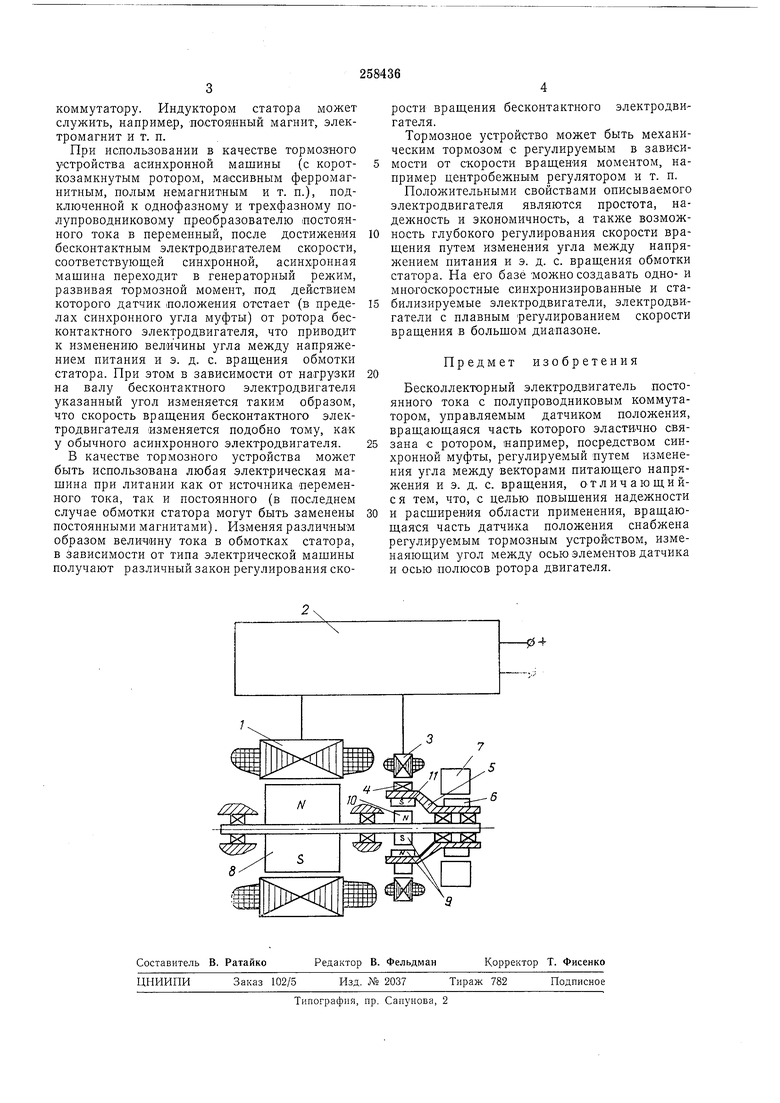
На чертеже показана схема бесконтактного электродвигателя с питанием от сети постоянного тока через полупроводниковый Коммутатор, управляемый датчиком положения ротора.
находится на одном валу 5 с ротором 6 тормозного устройства 7.
Вращающаяся часть 4 датчика положения и ротор 6 тормозного устройства связаны с 5 ротором 8 электродвигателя через синхронную муфту 9, например магнитную, один из элементов которой, постоянный магнит 10, расположен жестко на валу электродвигателя 1, другой, постоянный магнит 11 -на общем
0 валу 5.
Связь части 4 датчика положения с ротором двигателя может осуществляться, например, через синхронную (магнитную гистерезисную, реактивную, индукторную и т. п.)
5 или эластичную (резиновую, пружинную и т. п.) муфту.
Электромеханическое или механическое притормаживание ротора датчика положения осуществляется посредством механически жестко связанного с ним элемента, которым может быть либо ротор электрической Л1ашины гораздо меньщей мощности, чем двигатель, либо ротор центробежного регулятора и т. п.
Питание обмоток статора тормозной электрической машины может осуществляться, например, от автономного источника питания постоянного или переменного тока или подключаться параллельио обмоткам бескон