Изобретение относится к конструкциям привода ползуна пресса.
Известны устройства для перемещения ползуна, содержащие приводной вал ползуна и кинематически связанный с ним приводной вал пресса.
При перемещении ползуна такими устройствами скорость его при ходе вниз максимальна Б точке, близкой к средней точке хода, а кривые хода при этом представляют собой кривые косинусоиды.
В обычных прессах вытяжного типа, когда скорость вытяж-ки возрастает «а определенную величину, обрабатываемая деталь испытывает вредное воздействие. Поэтому скорость вытяжки неизбежно олраничена в пределах сравнительно небольщой величины.
Таким образом, прессы обычного вида обязательно должны быть сконструированы таким образом, чтобы количество ходов ползуна за единицу времени было рассчитано в зависимости от длины хода ползуна во время движения в рабочем цикле, и количество ходов ползуна в минуту может быть увеличено только в том случае, если заставить ползун двигаться не по косинусоиде, а по кривой, при которой скорость ползуна возрастает при ходе вниз от верхней мертвой точки и при ходе вверх от нижней мертвой точки.
обеспечения максимальной скорости перемещения ползуна в конце рабочего хода предложенное устройство снабжено установленной на приводном валу ползуна полой щестерней,
кинематически связанной с приводным валом и иередаточным механизмом, выполненным в виде размещенных внут1ри упомянутой щестерни двух зубчатых колес, одно из которых расположено на приводном валу пресса, а другое - на промежуточном кривощипном валу, смонтированном в полой щестерне; при этом .71ромеж;уточны1 1 вал и приводной вал пресса шарнирно связаны собой посредством рычагов.
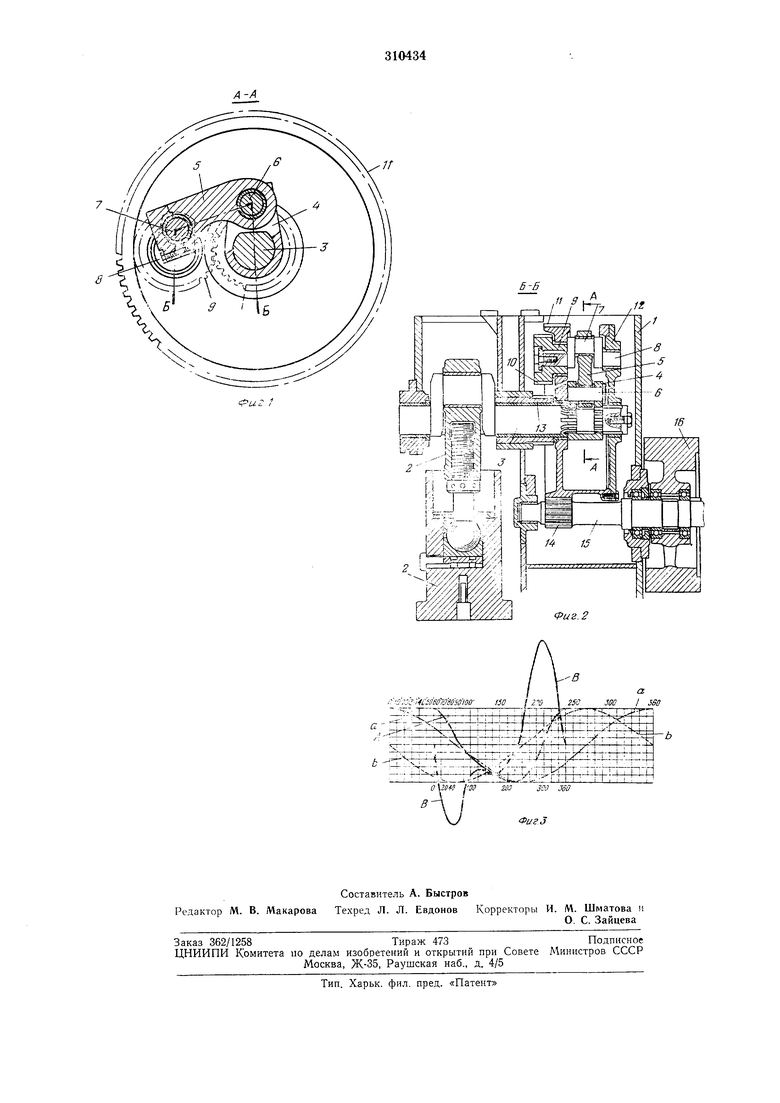
На фиг. 1 и 2 показано предложенное устройство (разрезы но Л-Л и Б-Б); на фиг. 3 - график, на котором дано сравнение приводного механизма нолзуна со старым приводным механизмом ползуна, где графически изображены кривые пе|ремещения иолзуна и характеристики скорости, полученные как при использованни нового, так и старого приводного механизма nOvi3yHa, соответственно.
Пресс состоит из рамы 1, ползуна 2, на котором установлена матрица (на чертеже не показана) обычным способом. Далее, на валу кривощипа 3 имеется плечо 4, соединенное с ним с помощью щпонки. На свободном конце
единенная с ним через лолеречный штифт 6, а второй конец звена соединен с пальцем кривошипа 7 вала воцомогательного кривошвпа 8, который, в свою очередь, одним своим концом соединен с валом 9 (планетарной передачи JO, имеющей, в Свою очередь, цапфу в главном приводе // и подшипники, расположенные между ниМИ, при этом главный привод свободно смонтирован на валу главного кривошипа 5. Другой конец вала вспомогательного кривошипа 8 имеет цапфу в монтажном диске 12, который образует единое целое с глав-ным приводом //. Планетарная передача 10 имеет зацепление с плаиетарной передачей 13, которая жестко смонтирована на раме / при концентрическом отношении к валу главного кривошипа 3 (см. р азрез по А-А, планетарная передача 10 показапа , как будто она отделена от 1пла.нетарной пе|редач И /5 для лучшей наглядности изображения).
Ведущая шестерня 14 неподвижно смонтирована на ОД1НОМ конце вала 15 главного привода, и эта шесте|рня входит в за-цепление с главным приводом //.
Работает устройство следующим образом.
Вал привода /5 приводится в движение от обычного источника движения (на чертеже не показан) через посредство .ма.хозика 16 и муфты сцепления (на чертеже не показана), смонтированной на другом конце вала привода /5.
Вал 15 привода устроен таким образом, что вращается с заранее заданной постоянной скоростью и заставляет вращаться главный привод благодаря сцеплению, существующему между шестерней 14 .и главным приводом 11. При вращении главного пр-ивода 11 планетарная .пе1редача Ю вращается вокруг своей собственной оси и одновременно с этим поворачивается вокруг планетарной передачи 13 благодаря зацеплению, существующему между этими планетарными передача.ми. Допустим, что планетарные передачи 10 и 13 имеют одинаковое количество зубьев, тогда планетарная пе1редача 10 совершит два полных оборота вокруг своей оси за то вре.мя, за .которое главный привод // сове|ршит один полный оборот вокруг своей оси. Поэто.му вал вспомогательного кривошипа 8, соединенный с валом 9 .планетарной передачи 10, совершит два полных оборота вок|руг своей оси за то время, за которое главный привод ,// совершит только один оборот вокруг своей оси. Другим1И словами, вал вспомогательного кривошипа 8 вращается с равноугольной скоростью. Однако, если это равноугольное вращательное дв.ижение вала вспомогательного кривошипа 8 рассматривать со стороны оси вала главного кривошипа 3, поскольку врашательное движение вала вспомогательного криво1пипа 8 передается через посредство звена ,5,
штифта 6 и плеча 4 вала главного кривошипа 3 на вал главного кривошипа, тогда равноугольное вращательное движение вала вспомогательного кривош,и1па 8 будет казаться
равноугольным вращательным движением, добавленным к кривошипно-рычажному движению так называемого мальтийского механизма.
Из равноугольного вращательного движения вала вспомогательного кривошипа 8 следует, что даже в том случае, «огда главный привод // вращается при равноугольном вращательном движении, такое движение главного привода // передается на вал главного
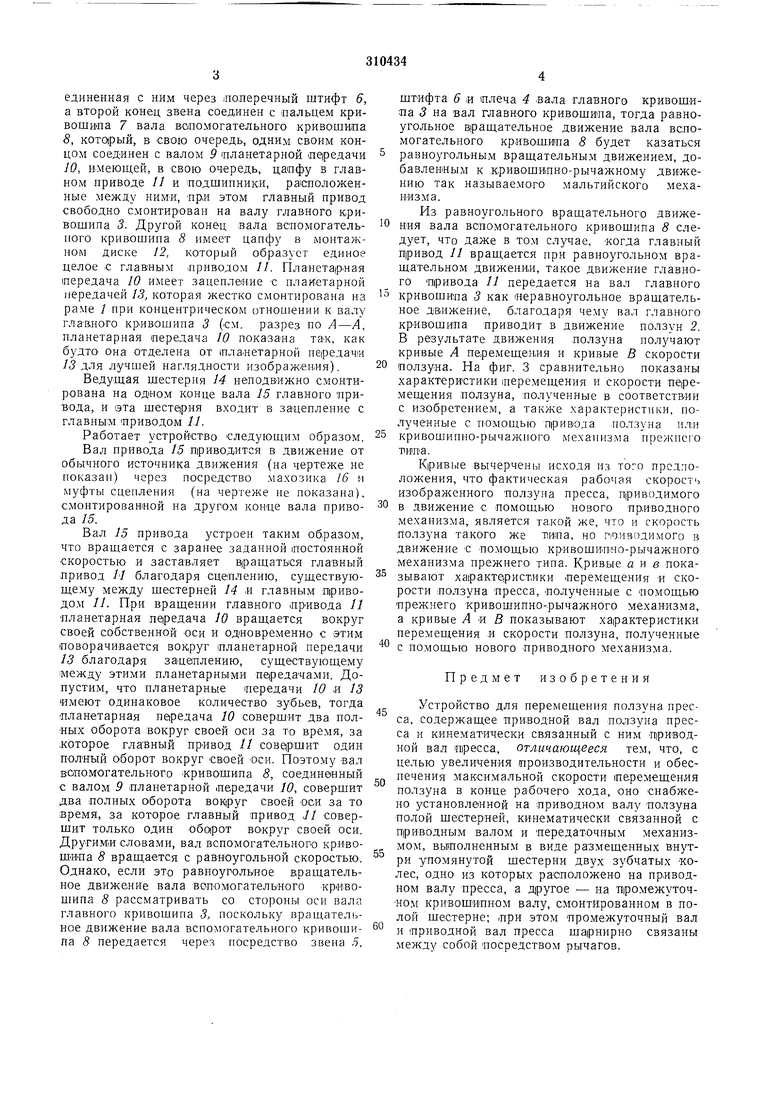
з кривошипа 3 как «еравноугольное вращательное дв-ижение, благодаря чему вал главного кривошипа приводит в движение ползун 2. В результате движения ползуна получают кривые А пе,ремещен,ия и кривые В скорости
0 ползуна. На фиг. 3 сравнительно показаны характеристики перемещения и скорости перемещения ползуна, полученные в соответствии с изобретением, а также характеристики, полученные с помощью привода ползуна ил.и
кривошипно-рычажного механизма прежнего .
Кривые вычерчены исходя из того предположения, что фактическая рабочая скорость изображенного ползуна пресса, приводимого
0 в движение с помощью нового приводного мехапизма, является та.кой же, что и скорость ползуна такого же типа, но подводимого в движение с помощью кривошвпно-рычажного механизма прежнего типа. Кривые айв показывают характе1рист,ики перемещения и скорости ползуна пресса, полученные с помощью прежнего кривошипно-рычажного механизма, а кривые Л и S показывают характеристики перемещения и скорости ползуна, полученные
О с помощью нового приводного механизма.
Предмет изобретения
Устройство для перемещения ползуна пресса, содерж ащее приводной вал ползуна пресса и кинематически связанный с ним приводной вал пресса, отличающееся тем, что, с целью увеличения производительности и обеспечения максимальной скорости перемещения ползуна в конце рабочего хода, оно снабжено установленной на приводном валу ползуна полой шестерней, кинематически связанной с приводным валом и передаточным механизмом, выполненным в виде размещенных внутри упомянутой шестерни двух зубчатых КОлес, одно из которых расположено на приводном валу пресса, а Д|ругое - на промежуточном кривошипном валу, смонтированном в полой шестерне; при этом промежуточный вал и приводной вал пресса шарнирно связаны между собой посредством рычагов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грейферное устройство для подачи заготовок в рабочую зону пресса | 1971 |
|
SU401092A1 |
| АВТОМАТИЧЕСКАЯ МАШИНА ДЛЯ ОБРАБОТКИ ДАВЛЕНИЕМ | 1993 |
|
RU2096122C1 |
| Пресс-автомат | 1985 |
|
SU1263546A1 |
| УСТРОЙСТВО для ПОДАЧИ и УПРАВЛЕНИЯ СКОРОСТЬЮ ЗАГОТОВКИ ПРИ ПРОКАТКЕ ПЕРИОДИЧЕСКИХ ПРОФИЛЕЙ | 1972 |
|
SU348267A1 |
| Станок для точки кардной гарнитуры шляпок | 1954 |
|
SU100815A1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1996 |
|
RU2110717C1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1991 |
|
RU2011909C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 1995 |
|
RU2102642C1 |
| МЕХАНИЗМ РЕГУЛИРОВКИ ХОДА ПОЛЗУНА КРИВОШИПНОГО ПРЕССА | 2002 |
|
RU2223862C2 |
| Пресс-автомат для обработки длинномерного материала | 1987 |
|
SU1442298A1 |