Известны автоматизированные бурильные установки, содержащие стреловидный манипулятор с автоподатчиком и устройством для его стабилизации в заданном направлении, гидродомкраты и устройства для программного управления.
Предлагаемая установка отличается от известных тем, что в шарнирах манипулятора размещены пневмопотенциометрические датчики, которые включены в дифференциальный мост совместно с пневмопотенциометрическим задатчиком, управляемым командоаппаратом с перфокартой. Это позволяет повысить производительность установки.
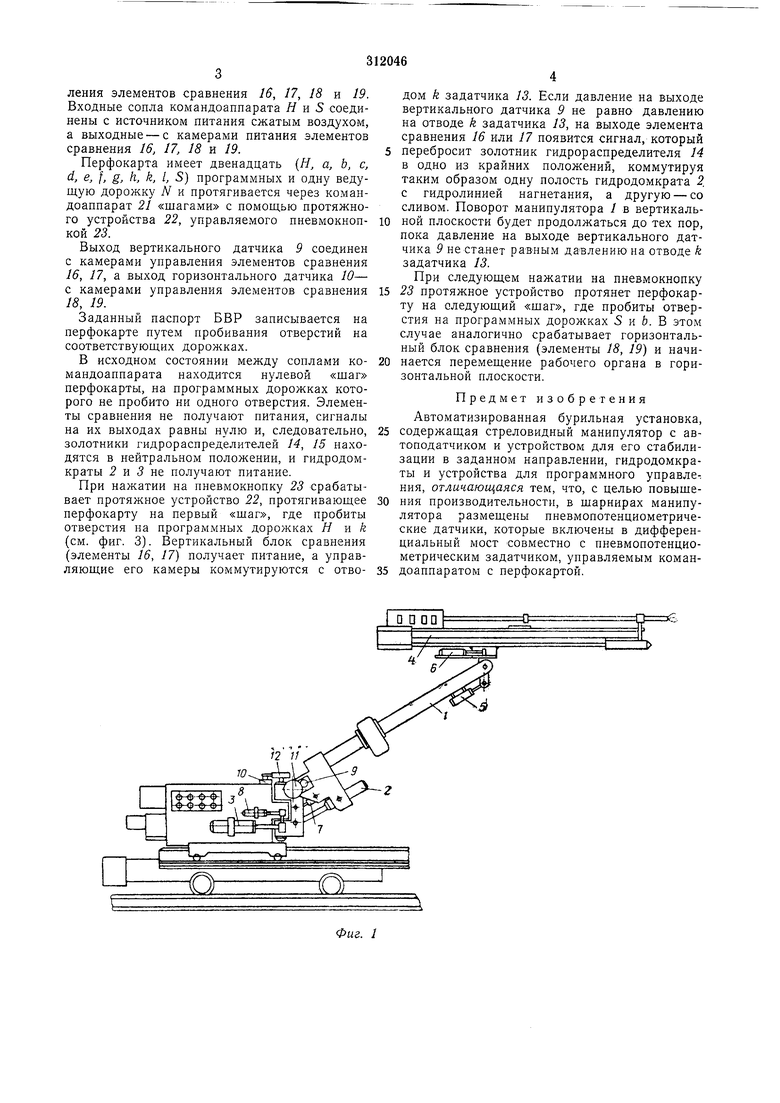
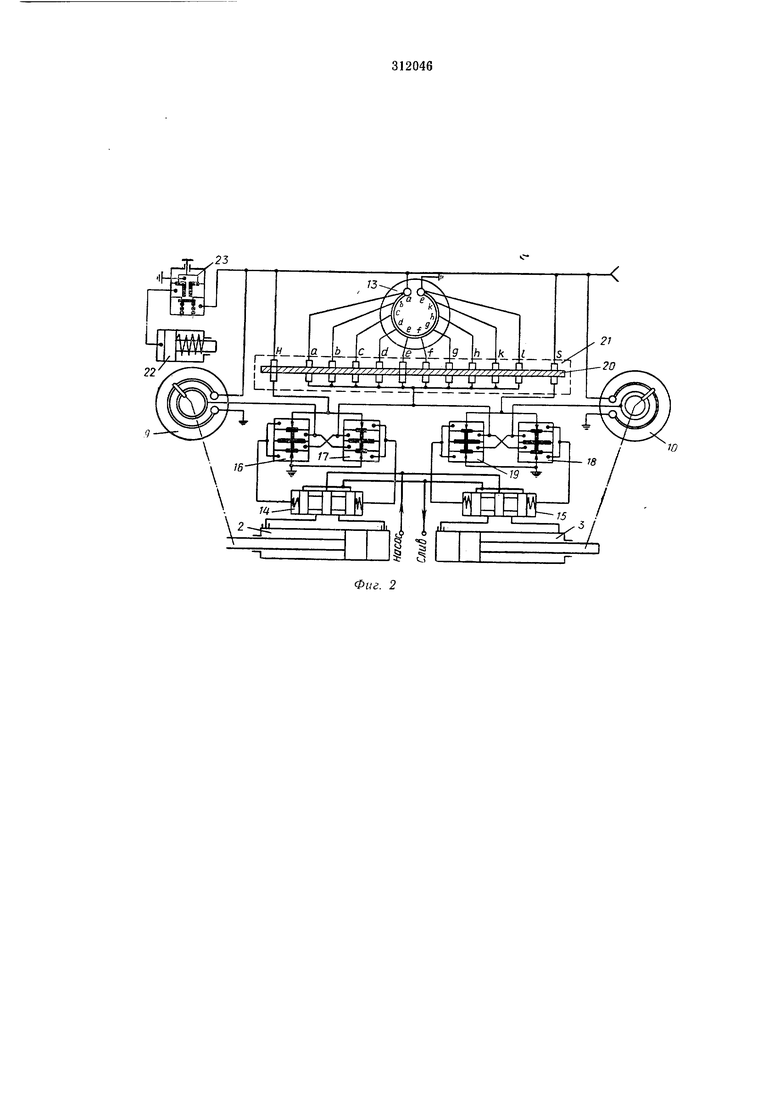
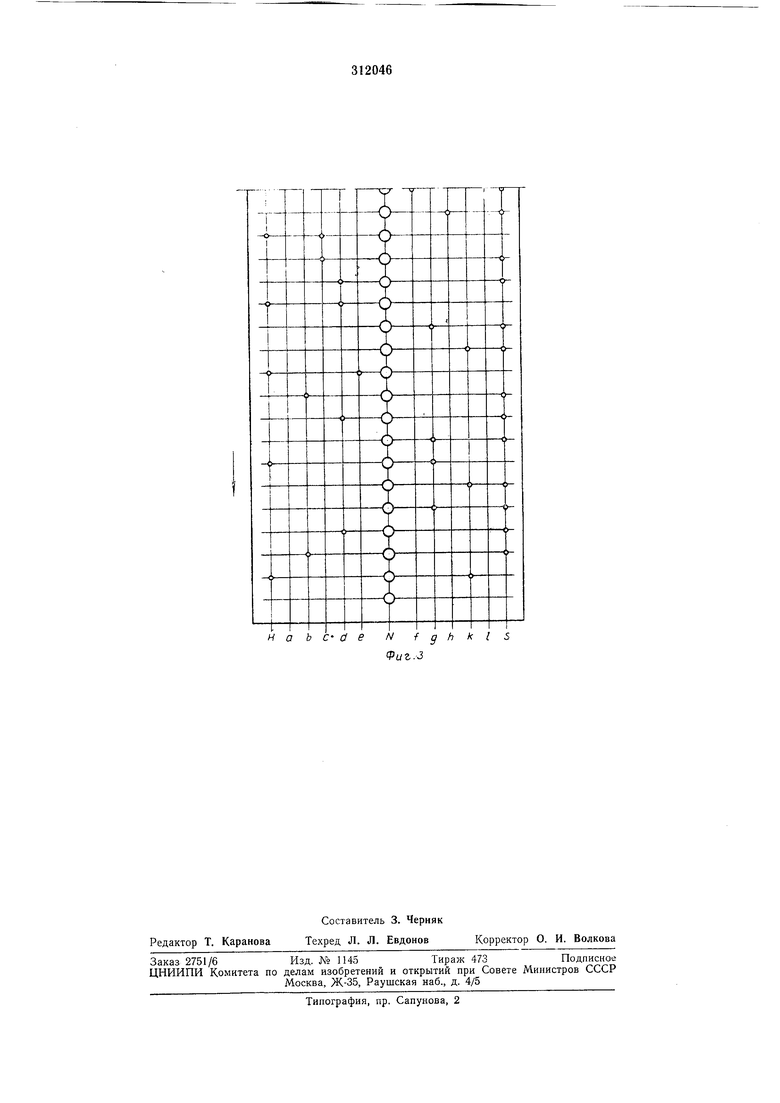
На фиг. 1 схематически изображена предлагаемая установка, общий вид; на фиг. 2 - принципиальная схема программного управления перемещением рабочего органа по заданным координатам; на фиг. 3 - перфокарта с программой команд на повороты манипулятора.
Стреловидный манипулятор / бурильной установки снабжен гидродомкратами подъема 2 и поворота 3. Автоподатчик 4, шарнирно закрепленный на конце манипулятора /, автоматически сохраняет заданное первоначальное направление (параллельно оси выработки) с помощью сервоцилиндров 5 и 6, управляемых соответственно гидродатчиками 7 и 5.
Вертикальный 9 и горизонтальный 10 датчики угловых перемещений манипулятора, кинематически связанные с помощью редукторов Л, 12 с гидродомкратами 2, 3, и задатчик 13
представляют собой пневматические потенциометры с дросселирующей канавкой, начало которой соединено с источником питания сжатым воздухом, а конец-с атмосферой; при этом параметры канавок датчиков и задатчика одинаковы. Задатчик 13 имеет десять отводов (а, Ь, с, d, е, f, g, h, k, /), соответствующих количеству возможных остановок манипулятора в вертикальной и горизонтальной плоскостях. Количество отводов задатчика зависит от
требований к разрешающей способности системы.
Гидродомкраты 2 п 3 включены в гидросистему установки через гидрораспределители М и /5, управляемые вертикальным блоком
сравнения (элементы 16, 17) и горизонтальным блоком сравнения (элементы 18, 19) соответственно.
Для преобразования программы команд угловых поворотов манипулятора, записанных
на перфокарте 20, в пневматические сигналы служит командоаппарат 21 с двенадцатью входными и выходными соплами. Входные сопла командоаппарата а, Ь, с, d, е, f, g, h, k, I соединены с соответствующими отводами ления элементов сравнения 16, 17, 18 и 19. Входные сопла командоаппарата Я и 5 соединены с источником питания сжатым воздухом, а выходные - с камерами питания элементов сравнения 16, 17, 18 и 19. Перфокарта имеет двенадцать (Н, а, Ь, с, f § h, k, I, S) программных и одну ведущую дорожку Л и протягивается через командоаппарат 21 «шагами с помощью протяжного устройства 22, управляемого пневмокноп-ю кой 23. Выход вертикального датчика 9 соединен с камерами управления элементов сравнения 16, 17, а выход горизонтального датчика 10- с камерами управления элементов сравнения15 Заданный паспорт БВР записывается на перфокарте путем пробивания отверстий на соответствующих дорожках. В исходном состоянии между соплами ко-20 мандоаппарата находится нулевой «шаг перфокарты, на программных дорожках которого не пробито ни одного отверстия. Элементы сравнения не получают питания, сигналы на их выходах равны нулю и, следовательно,25 золотники гидрораспределителей 14, 15 находятся в нейтральном положении, и гидродомкраты 2 и 5 не получают питание. При нажатии на пневмокнопку 23 срабатывает протяжное устройство 22, протягивающее30 перфокарту на первый «шаг, где пробиты отверстия на программных дорожках Н и k (см. фиг. 3). Вертикальный блок сравнения (элементы 16, 17) получает питание, а управляющие его камеры коммутируются с отво-35 5 дом k задатчика 13. Если давление на выходе вертикального датчика 9 не равно давлению на отводе k задатчика 13, на выходе элемента сравнения 16 или 17 появится сигнал, который перебросит золотник гидрораспределителя 14 в одно из крайних положений, коммутируя таким образом одну полость гидродомкрата 2, с гидролинией нагнетания, а другую-со сливом. Поворот манипулятора / в вертикальной плоскости будет продолжаться до тех пор, пока давление на выходе вертикального датчика Р не станет равным давлению на отводе/fe задатчика 13. При следующем нажатии на пневмокнопку 23 протяжное устройство протянет перфокарту на следующий «шаг, где пробиты отверстия на программных дорожках 5 и ft. В этом случае аналогично срабатывает горизонтальный блок сравнения (элементы 18, 19) и начинается перемещение рабочего органа в горизонтальной плоскости. Предмет изобретения Автоматизированная бурильная установка. содержащая стреловидный манипулятор с автоподатчиком и устройством для его стабилизации в заданном направлении, гидродомкраты и устройства для программного управле-. ния, отличающаяся тем, что, с целью повышения производительности, в шарнирах манипулятора размещены пневмопотенциометрические датчики, которые включены в дифферендиальный мост совместно с пневмопотенциометрическим задатчиком, управляемым командоаппаратом с перфокартой.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БУРИЛЬИОЙ УСТАНОВКОЙ | 1973 |
|
SU368395A1 |
| АВТОМАТИЗИРОВАННАЯ БУРИЛЬНАЯ УСТАНОВКА | 1971 |
|
SU301434A1 |
| БУРОВАЯ УСТАНОВКА | 1969 |
|
SU255153A1 |
| Устройство программного циклового управления позиционированием манипулятора бурильной установки | 1978 |
|
SU747997A1 |
| БУРИЛЬНЫЙ МОДУЛЬ СТВОЛОВОЙ БУРИЛЬНОЙ УСТАНОВКИ | 2011 |
|
RU2455485C1 |
| Манипулятор для бурения шпуров | 1960 |
|
SU132592A1 |
| БУРОВАЯ УСТАНОВКАвсЕсс:о?;-'АЯПАТШ; Ч;Г-Т.-л»*:Ч-:СКАЯ библиотека 1АЬА | 1971 |
|
SU301433A1 |
| Система управления пневматическим манипулятором | 1978 |
|
SU943647A1 |
| Буровой агрегат | 1979 |
|
SU857470A1 |
| Навесной манипулятор | 1975 |
|
SU594310A1 |
Фиг. 1
.X XX/ X XX . . (
....-.
g у у 1 у 1 у g t -n
пп
Фиг. 2
