1
Изобретение относится к горной промышленности в частности к устройствам для управления манипуляторами бурильных установок.
Известна моделирующая, позиционная система программного управления ctpeлoвидными манипуляторами бурильных установок, включающая пульт управления, состоящий из мнемосхемы паспорта буровзрывных работ, выполненной в виде панелей сощть рями, а также сравнивающие и усилительные устройства 1.
Такие системы сложны, их следящие устройства не обеспечивают высокой надежности в условиях высокой запыленности и вибрации установки, так как датчики должны размещаться на подвижных элементах конструкции стреловидного манипулятора. Кроме того, указанные системы позволяют программировать только две координаты, Н{ давая возможности управлять бурением по; разными углами к плоскости забоя
Известна гидравлическая система программного управления стреловидным рабочим органом горной машины, содержащая
гидравлический привод, гидроцилиндры горизонтального и вертикального перемещения, датчики его положения и программные элементы, включающие программоносители, выполненные в виде профильной рейки (2. 5 Однако сложность конструкции и невозможность управления бурением под разными углами к плоскости забоя не позволяют применять их для самоходных бурильных установок.
10 J Наиболее близким решением по технической сущности и достигаемому эффекту является устройство программного циклового управления позицированием манипулятора бурильной установки, включающее привод перемещения элементов манипулятора
в виде гидроцилиндров с электрогидравлическими распределителями со сливной и напорной линией, командоаппарат для задания последовательности и направления перемещений гидроцилиндров и блоки остановки перемещений с приводом каждого гидроцилиндра в заданных положениях, и включатели 3.
Его недостатком является то, что блоки остановки перемещения должны располагаться на перемещающихся элементах манипулятора, а это затрудняет смену программ (переналадку) и при высокой запыленности атмосферы, а также вибрации стрелы резко снижает надежность этих устройств.
Целью изобретения является расширение области применения программного циклового управления позиционированием, облегчение смены программ и повышение надежности.,10
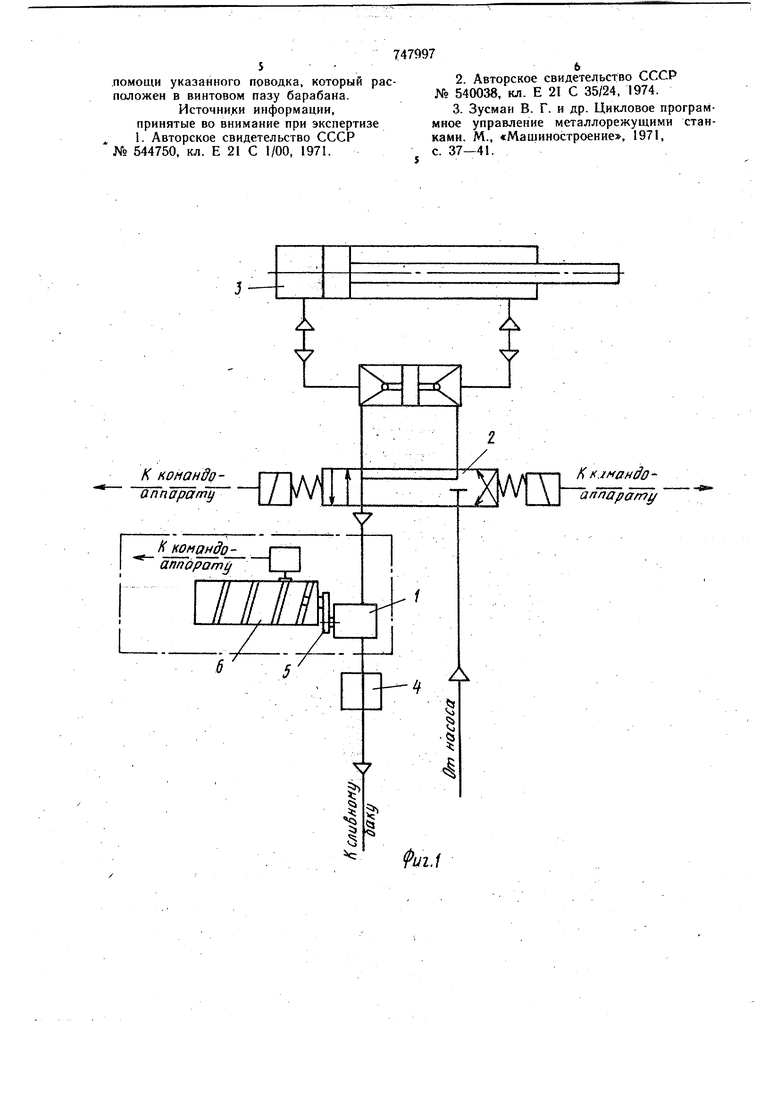
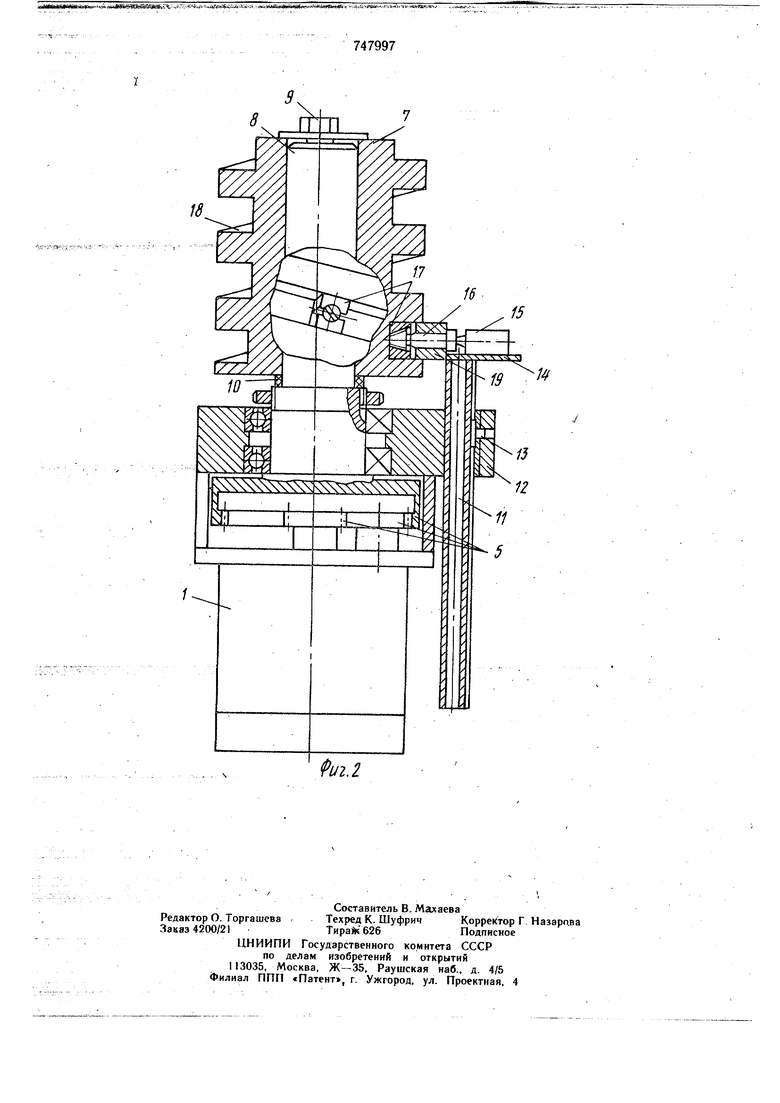
Для достижения указанной цели блок Остановки перемещений каждого гидроцилиндра имеет барабан, соединенный с ротором гидромотора привода, который сооб щен со сЛивной линией гидроцилиндра, при этом барабан выполнен с винтовым пазом, в котором последовательно размещены регулируемые упоры для взаимодействия/с выключателем, имеющим поводок и установленным с возможностью поступательного 2Г перемещения вдоль оси барабана при помощи указанного поводка, который расположен в винтовом пазу барабана. - На фиг. 1 дана принципиальная схема программного циклового управления одного гидроцилиндра (совокупность их по числу 2 гидроцилиндров; подключенных к командоаппарату, составляет устройство циклового программного управления позиционированием манипулятора бурильной установки); на фиг. 2 - разрез блока остановки переме- JQ щений гидроцилиндра.
Гидромотор 1 соединен через электрогидравлический распределитель 2 с общей сливной магистралью гидроцилиндра 3 и через напорньгй золотник 4 со сливным баком,. (на чертеже не показан): Через редуктор 5 гидромотор I кинематически связан с блоком остановки перемещений 6 (фиг. 1), который содержит (фиг. 2) сменный барабан 7, установленный на валу 8, и винтом 9 р прижат к фрикциону 10. На втулке 11, имеющей возможность поступательного перемещенияв плите 12 по скользящей шпонке 13, закреплен корпус 14 с выключателем 15, который может взаимодействовать через тол катель 16 с регулируемыми упорами 17, размещенными в винтовом пазу 18 барабана 7. Поводок 19, закрепленный на корпусе 14 выключателя, расположен в винтовом пазу 18 барабана 7. Электромагниты электрогидравлического распредел1ителя 2 и. вы- .. ключатель 15 подключены к командоаппарйту (на чертеже не показан).
Работа устройства происходит следующим образом.
Перед началом работы, когда манипу- лятор занимает заданное исходное положение, упор 17 исходного-положения взаимодействует с выключателем 15 (нажимает на
747997
выключатель), электрогидравлический распределитель 2 гидроцилиндра 3 отключен. При включении командоаппаратом в соответствии с программой электрогидравлического распределения начинается перемещение поршня гидроцилиндра 3, при этом из сливной полости вытекает рабочая жидкость, и происходит вращение гидромотора и барабана 7 до взаимодействия выключателя 15 с предварительно настроенным очередным упором 17, отключающим электрогидравлический распределитель 2 и останавливающий перемещение гидроцилиндра в заданном положении. Следующий цикл осуществляется по заданию командоаппарата в том же порядке до отключения электрогидравлического распределителя 2 через выключатель 17 очередным последующим упором и т. д.
Применение устройства программного циклового управления позиционированием манипуляторов для самоходных бурильных установок повышает точность соблюдения паспорта буровзрывных работ.
Кроме того, предлагаемое решение дает возможность применить дистанционное управление и вывести оператора из зоны воздействия вибрации исполнительных мехаг низмов, что является существенным требованием охраны труда и техники безопасности.
Дополнительно автономность конструкции дает возможность использовать унифици)ованный шкаф программного управления на различных бурильных установках при подключении его в гидросистему и без конструктивных изменений манипуляторов.
Формула изобретения
Устройство программного циклового управления позиционированием манипулято ра бурильной установки, включающее привод перемещения элементов манипулятора в виде гидроцилиндров с электрыидравлическими распределителями со сливной и напорной линией, командоаппарат для задания последовательности и направления перёмещенкч гидроцилиндроз и блоки остановки перемещений с приводом каждого гидроцилиндра в заданных положениях, выключатели, отличающееся тем, что, с целью облегчения смены программ и повышения надежности, блок остановки перемещений каждого гидроцилиндра имеет барабан, соединенный с ротором гидромотора привода., который сообщен со сливной линией гидроцилиндра, при этом барабан выполнен с винтовым пазом, в котором последовательно размещены регулируемые упоры для взаимодействия с выключателем, имеющим поводок и уста.новленным с возможностью поступательного перемещения вдоль оси барабана при
.помощи указанного поводка, который расположен в винтовом пазу барабана.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 544750, кл. Е 21 С 1/00, 1971.
2 Авторское свидетельство СССР № 540038, кл. Е 21 С 35/24, 1974.
3. Зусман В. Г. и др. Цикловое программное управление металлорежущими станками. М., «Машиностроение, 1971, с. 37-41.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления литьевой машиной | 1985 |
|
SU1326438A1 |
| Пресс для монтажа и демонтажа узлов | 1988 |
|
SU1574426A1 |
| Устройство управления стреловидным исполнительным органом горного комбайна | 1982 |
|
SU1036919A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1991 |
|
SU1775527A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| Система управления пневматическим манипулятором | 1978 |
|
SU943647A1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ГИДРОТЕХНИЧЕСКОГО ЗАТВОРА | 2010 |
|
RU2438060C1 |
| АВТОМАТИЗИРОВАННАЯ БУРИЛЬНАЯ УСТАНОВКА | 1971 |
|
SU312046A1 |
| СПОСОБ ОТМЕРА ДЛИН СОРТИМЕНТОВ ПРИ РАСКРЯЖЕВКЕ ХЛЫСТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2005591C1 |
| Бурильная установка горной машины | 1981 |
|
SU968375A1 |
/T/cy/v//// .чв arindpami/
8
SS
747997
15
