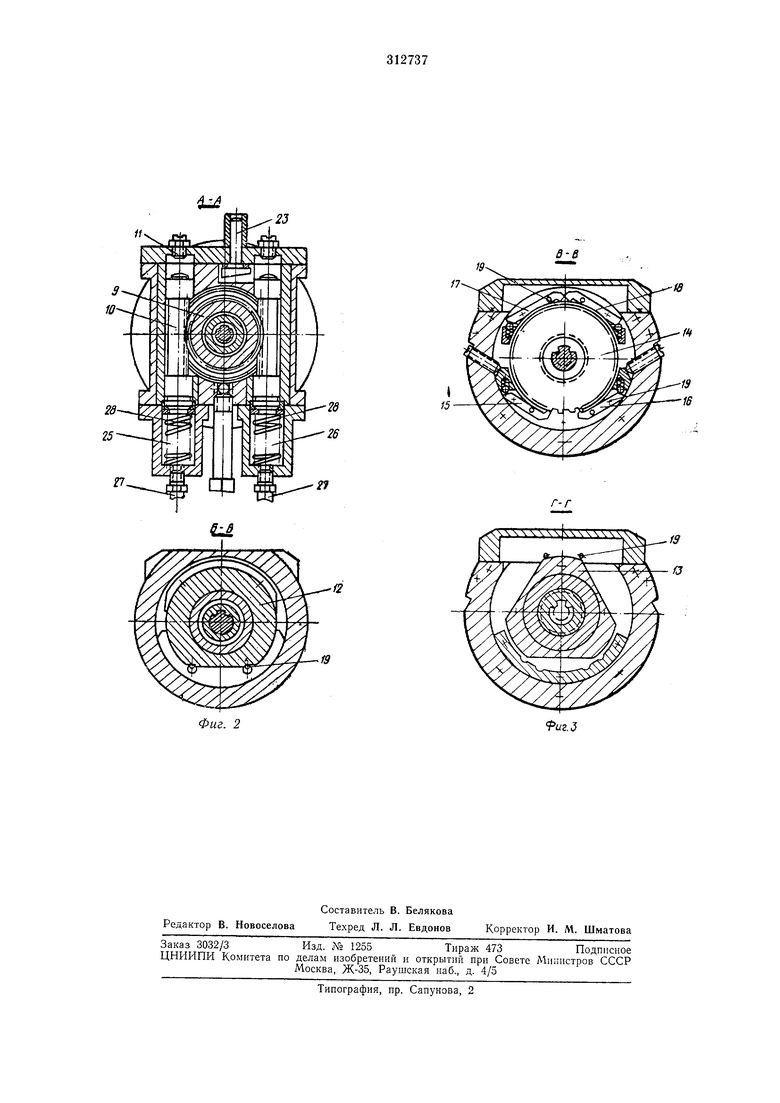
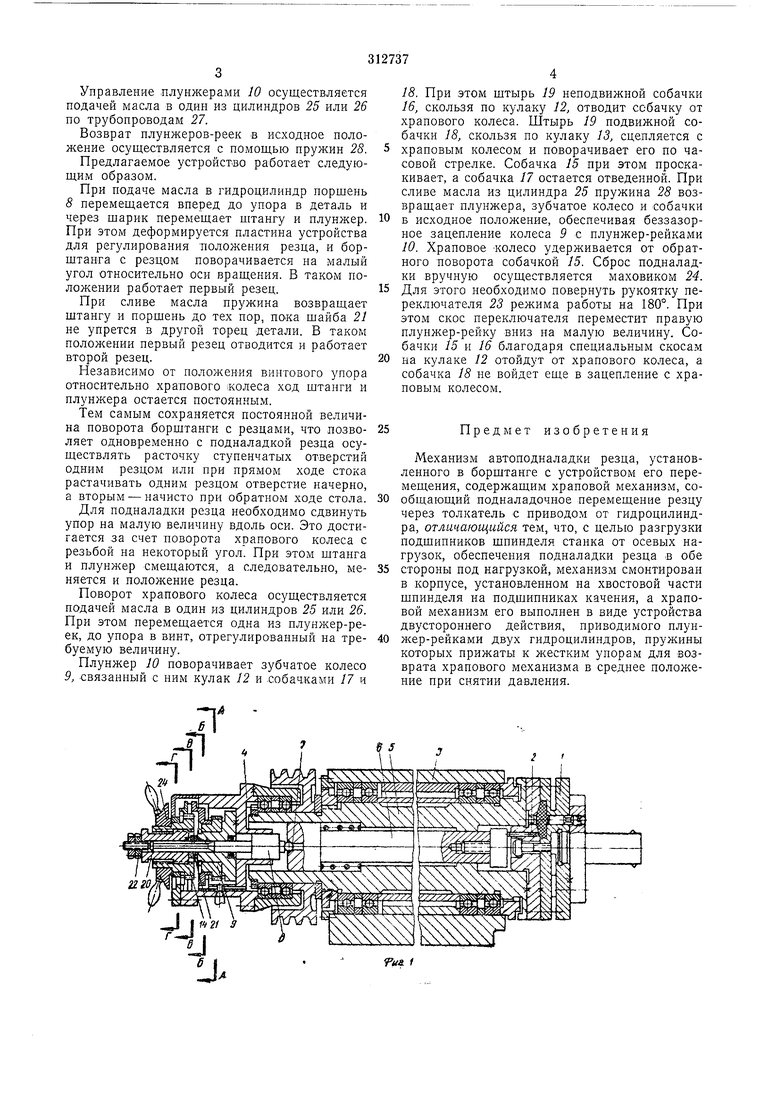
Известны механизмы автоподналадки резца, установленного в борштанге с устройством его перемещения, содержащие храповой механизм, сообщающий подналадочное перемещение резцу через толкатель, с приводом от гидроцилиндра. С целью разгрузки подщипников щпинделя станка от осевых нагрузок, обеспечения подналадки резца в обе стороны под нагрузкой предлагаемый механизм смонтирован в корпусе, установленном на хвостовой части шпинделя станка на подшипниках качения, а храповый его механизм выполнен в виде устройства двустороннего действия, приводимого плунжер-рейками двух гидроцилиндров, пружины которых прижаты к жестким упорам для возврата храпового механизма в среднее положение при снятии давления. На фиг. 1 изображен продольный разрез шпиндельной головки станка, оснащенной предлагаемым механизмом для автоподналадки резца; на фиг. 2-разрезы по Л-А и Б-Б; на фиг. 3-разрезы по В - В и Г - Г. Механизм автоподналадки состоит из устройства для регулирования пололсения резца 1 с плунжером 2 и управляющего устройства, прикрепленныхК корпусу расточной головки 5. низм подналадки позволяет применять любые другие конструкции расточных оправок. Управляющее устройство состоит из корпуса 4, установленного на подшипниках щпинделя 5. Плунжер 2 упирается в подпружиненную щтангу 6 с щариком 7. В корпусе управляющего устройства имеется гидроцилиндр с поршнем 8 и храповый механизм, состоящий из зубчатого колеса 9, двух плунжер-реек 10, взаимодействующих с регулируемыми упорами 11. Там же находится поворотный кулак 12, жестко связанный с зубчатым колесом, неподвижный кулак 13 и храповое колесо 14. В корпусе механизма стационарно смонтированы две подпрулшненные храповые собачки 15 и 16, сцепленные в исходном положении с храповым колесом и предотвращающие его поворот, а на поворотном кулаке 12-две собачки 17 и 18, отведенные в исходном положении от колеса М. Собачки качаются на осях и снабжены штырями 19, на которые воздействуют кулаки. В резьбовое отверстие храпового колеса 14 ввинчен упор 20, ограничивающий с помощью шайбы 21 ход поршня в левую сторону, а с помощью регулируемых гаек 22- ход поршня вправо.
Управление .плунжерами 10 осуществляется подачей масла в один из цилиндров 25 или 26 по трубопроводам 27.
Возврат плунжеров-реек в исходное положение осуществляется с помощью пружин 2S.
Предлагаемое устройство работает следующим образом.
При подаче масла в гидроцнлиндр поршень 8 перемещается внеред до упора в деталь и через шарик перемещает штангу и плунжер. При этом деформируется пластина устройства для регулирования положения резца, и борштанга с резцом поворачивается на малый угол относительно оси вращения. В таком положении работает первый резец.
При сливе масла пружина возвращает штангу и поршень до тех пор, нока шайба 21 не упрется в другой торец деталн. В таком полол ении первый резец отводится и работает второй резец.
Независимо от положения винтового упора относительно храцового колеса ход штанги и плунжера остается постоянным.
Тем самым сохраняется постоянной величина новорота борштанги с резцами, что позволяет одновременно с подналадкой резца осуществлять расточку ступенчатых отверстий одним резцом или при прямом ходе стока растачивать одним резцом отверстие начерно, а вторым - начисто при обратном ходе стола.
Для подналадки резца необходимо сдвинуть уцор на малую величину вдоль оси. Это достигается за счет поворота храпового колеса с резьбой на некоторый угол. При этом штанга и плунжер смещаются, а следовательно, меняется и положение резца.
Поворот храпового колеса осуществляется подачей масла в один из цилиндров 25 или 26. При этом перемещается одна из плунжер-реек, до упора в винт, отрегулированный на требуемую величину.
Плунжер 10 поворачивает зубчатое колесо 9, связанный с ним кулак 12 и ,собач,ками 17 и
18. При этом штырь 19 неподвижной собачки 16, скользя по кулаку 12, отводит собачку от храпового колеса. Штырь 19 подвижной собачки 18, скользя по кулаку 13, сцепляется с
храповым колесом и поворачивает его по часовой стрелке. Собачка 15 при этом проскакивает, а собачка 17 остается отведенной. При сливе масла из цилиндра 25 пружина 28 возвращает плунжера, зубчатое колесо и собачки
в исходное положение, обеспечивая беззазорное зацепление колеса 9 с плунжер-рейками 10. Храповое -колесо удерживается от обратного поворота собачкой 15. Сброс подналадки вручную осуществляется маховиком 24.
Для этого необходимо повернуть рукоятку переключателя 23 режима работы на 180°. При этом скос переключателя переместит правую плунжер-рейку вниз на малую величину. Собачки 15 н 16 благодаря снециальным скосам
на кулаке 12 отойдут от храпового колеса, а собачка 18 не войдет еще в зацепление с храповым колесом.
Предмет изобретения
Механизм автоподналадки резца, установленного в борштанге с устройством его перемещения, содержащим храповой механизм, сообщающий подналадочное перемещение резцу через толкатель с приводом от гидроцилиндра, отличающийся тем, что, с целью разгрузки подшипников шпинделя станка от осевых нагрузок, обеспечения нодналадки резца В обе
стороны под нагрузкой, механизм смонтирован в корпусе, установленном на хвостовой части шпинделя на подшипниках качения, а храповой механизм его вынолнен в виде устройства двустороннего действия, приводимого плунлеер-рейками двух гидроцилиндров, пружины которых прижаты к жестким упорам для возврата храпового механизма в среднее положение при снятии давления.
23
в-s
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДНАЛАДКИ РАСТОЧНОГО РЕЗЦА | 1970 |
|
SU278346A1 |
| МЕХАНИЗМ ПОДНАЛАДКИ РЕЗЦА | 1969 |
|
SU247749A1 |
| АЛМАЗНО-РАСТОЧНОЙ СТАНОК (• '^^*•ti^-ib/ИО. :}:КА | 1973 |
|
SU368941A1 |
| Устройство для автоматической подналадки резцов борштанги | 1988 |
|
SU1558559A1 |
| РАСТОЧНОЙ СТАНОК | 1972 |
|
SU327970A1 |
| Устройство для автоматической подналадки резца | 1985 |
|
SU1346350A2 |
| РЕЗЬБОТОКАРНЫЙ ПОЛУАВТОМАТ С НЕРЕВЕРСИВНЫМ ШПИНДЕЛЕМ | 1969 |
|
SU241904A1 |
| Устройство для автоподналадкииНСТРуМЕНТА | 1979 |
|
SU806369A1 |
| Устройство для автоматической подналадки резца | 1984 |
|
SU1187929A1 |
| СИЛОВАЯ РАСТОЧНАЯ ГОЛОВКА | 1971 |
|
SU314600A1 |