Изобретение относится к технике автоматического управления, к классу самонастраивающихся систем.
Известные оптимизаторы содержат устройство управления (выполненное в виде соединения мультивибраторов, делителей частоты, триггеров), исполнительное устройство, .устройство определения производной и реле коммутации.
Известные автоматические оптимизаторы довольно сложны.
Цель изобретения-упрощение устрой.ства, повышение его надежности и по.мехоустойчивости.
В предлагаемом оптимизаторе это достигается тем, что устройство управления в нем выполнено в виде мультивибратора, одно плечо которого через дифференцирующую цепочку соединено с одним из входов исполнительного устройства, а другое плечо через конденсатор соединено с обмотками первого и второго реле коммутации и через дифференц; рующую цепочку - с обмотками третьего коммутации.
На фиг. 1 представлена блок-схема устройства управления оптимизатора, где 1 - мультивибратор; 2, 3 - дифференцирующие цепочки, 4 - конденсатор,
электромагнитмые коммутации.
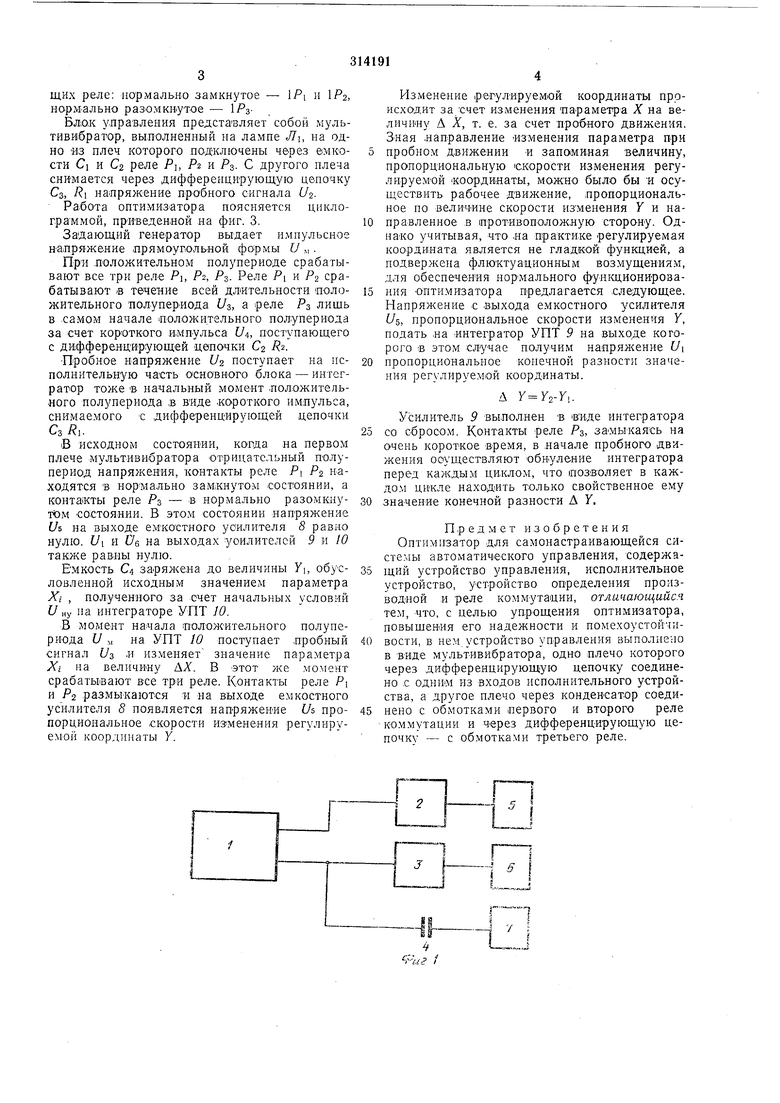
На фиг. 2 153обра кена принципиальная схема опти.мизатора, где I - объект управления с регулируемой координатой (x); II - устройство для определения частной производной; П1 - исполнительное устройство; IV - устройство управления.
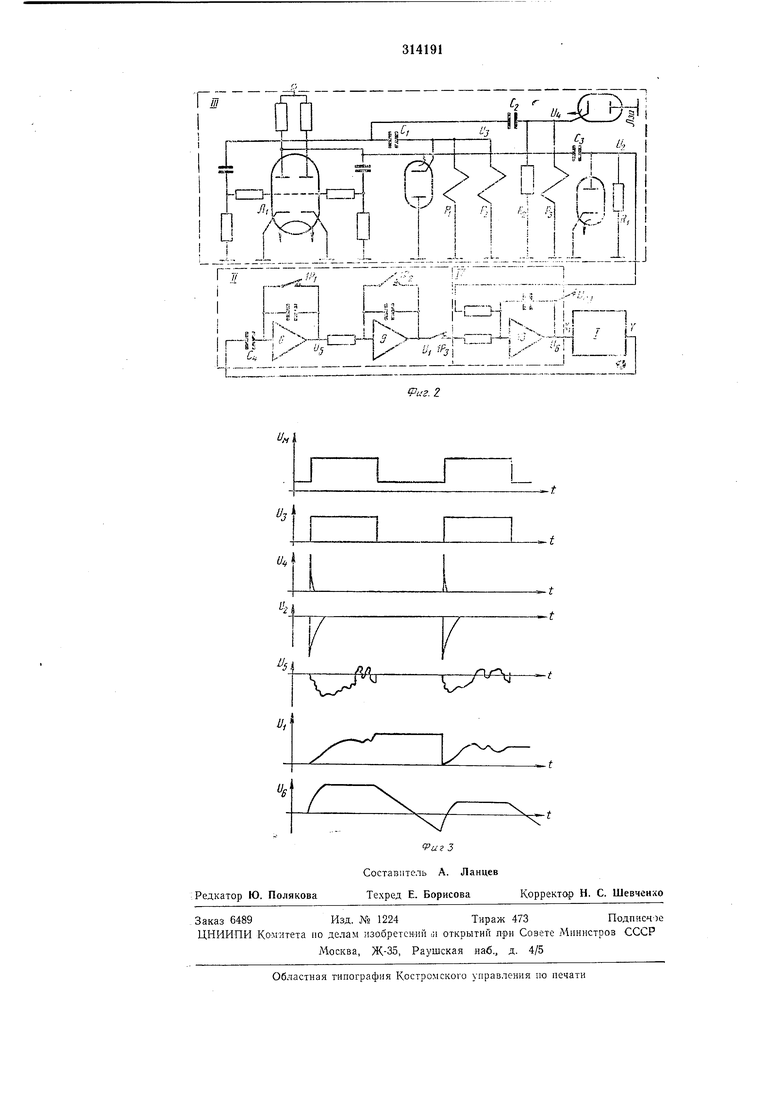
На фиг. 3 - схема, поясняющая работу устройства.
Устройство И для определения частной производной состоит из тре.х усилителей постоянного тока (УПТ) 8, 9, 10. На УПТ S, 9 набрано устройство определения и запоминания челичины, пропорциональной частной производной регулируемой координаты Y по параметру Xi, в виде конечных приращений, т. е.
. Av
где / - коэффициент проиорциоД.г, нальности.
На УПТ 10 набрана исполнительная часть в в;1де электронного интегратора, на вход FCOторого поступает при рабочем движении величина И пропорИИональная частной про.изподноГ; КООПД1ПП1ТЫ Y.
При пробном движении на вход интегратора поступает пробное напряжение t/o, пропорциональное величине Л Х. 30 Исходное состояние контактов управляющих реле: нормально замкнутое - IPi и 1Р2, норм-ально разомкнутое - 1РзБлок управления представляет собой мультивибратор, выполненный на лампе Л, на одно из плеч которого подключены через емкости Ci и С2 реле Р, Рг и РЗ. С другого плеча снимается через дифференцирующую цепочку Сз, R напряжение пробного сигнала U.
Работа оптимиз атора поясняется циклограммой, приведенной на фИг. 3.
Задающий генератор выдает импульсное напряжение лрямоуполь-ной формы f/,, .
ПрИ .положительном полупериоде срабатывают все три реЛе Р, Pz, Р. Реле Р и Р--: срабатывают В течение всей длительности положительного полуперИода Hz, а реле РЗ лишь в -самом начале положительного полупериода за счет короткого и.мпульса t/4, поступающего с дИ|ф,ференцИруюЩей цепочки Сз R.
Пробное напряжение t/a поступает на исполнительную часть основного блока - интегратор тоже в начальный момент лоложительного полупериода ,в виде -короткого импульса, снимаемого с дифференцирующей депочки C,R,.
В исходном состоянии, когда на первом плече мультивибратора отрицательный полупериод напряжения, контакты реле PI PZ находятся в нормально зам.кнутом -состоянии, а контакты реле РЗ - в нормально разомкнутом состоянии. В этом состоянии напряжение t/5 на выходе емкостного усилителя 8 равно нулю, t/i и (7б на выходах усилителей 9 и 10 также рав-ны нулю.
Емкость С4 заряжеиа до величины УЬ обусловленной исходным значением параметра Xi , полученного за счет начальных условий и „у иа интеграторе УПТ }0.
В момент начала иоложительного полупериода и м на УПТ 10 поступает пробный сигнал Uz .и изменяет значение параметра Xi иа величину АХ. В этот же момент срабатывают в-се три реле. Контакты реле PI и Р2 размыкаются и на выходе емкостного усилителя 8 появляется напряжен ие Us пропорциональное .скорости изменения регулируемой координаты У.
Изменение регулируемой координаты происходит за счет изменения параметра X на величину Д X, т. е. за счет пробного движения. Зная .направление изменения параметра при 5 пробном движении и запоминая величину, пропорциональную скорости изменения регулируемой Координаты, можно было бы и осуществить рабочее движение, пропорциональное по величине скорости изменения У и направленное .в противоположную сторону. Однако учитывая, что на практике регулируемая координата является не гладкой функцией, а подвержена флюктуационным возмущениям, для обеспечения нормального функционирова5 НИН оптимизатора предлагается следующее. Напряжение с выхода емкостного усилителя t/5, пропорциональное скорости изменения У, подать на интегратор УПТ 9 на выходе которого с этом случае получим напрял ение f/i
0 пропорциональное конечной разности значения регулируемой коорлт;инаты.
Д У У2-Уь
Усилитель 9 выполнен в виде интегратора 5 со сбросом. Контакты реле РЗ, за мыкаясь на очень короткое время, в начале пробного движения осуществляют обнуление интегратора перед каждым циклом, что позволяет в каждом цикле находить только свойственное ему 0 значение конечной разности А У.
Предмет изобретения Оптимизатор для самонастраивающейся системы автоматического управления, содержащий устройство управления, исполнительное устройство, устройство определения производной и реле коммутации, отличающийся тем, что, с целью упрощения оптимизатора, повыщения его надежности и помехоустойчивости, в нем устройство управления выполнено в виде мультивибратора, одно плечо которого через дифференцирующую цепочку соединено с одиИМ из входов исполнительного устройства, а другое плечо через конденсатор соединено с обмотками первого и второго реле коммутации и через дифференцирующую цепочку - с обмотками третьего реле.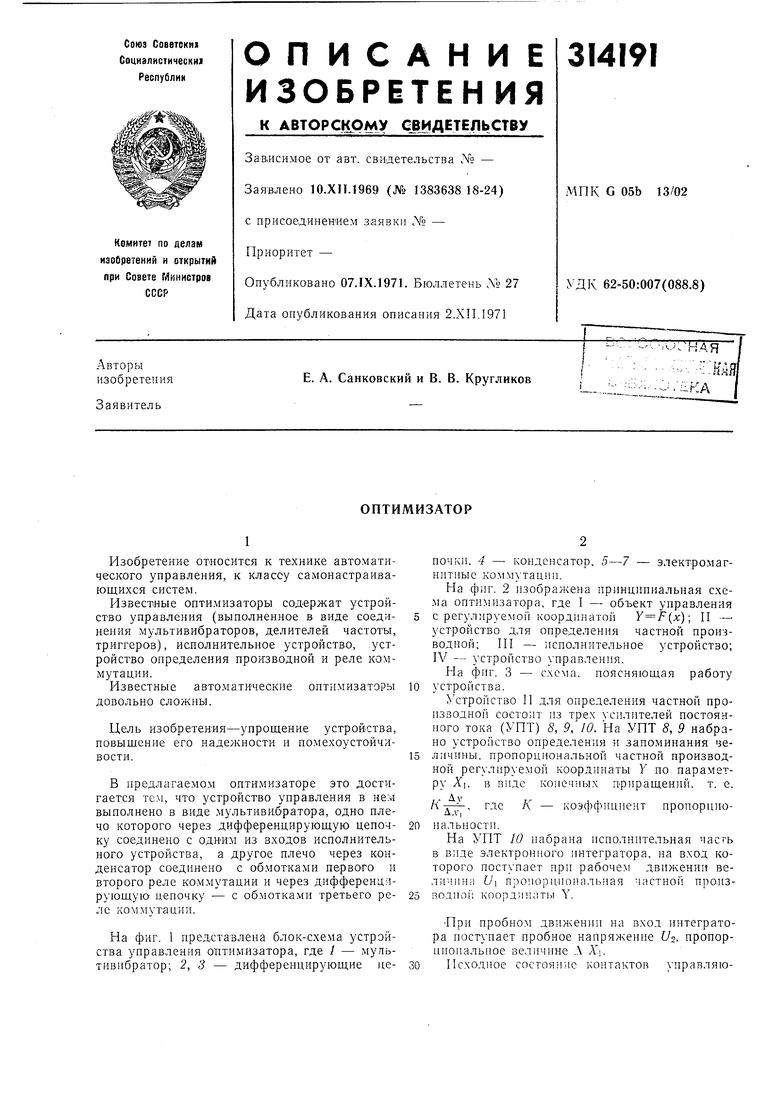
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ЧАСТНОЙ ПРОИЗВОДНОЙ | 1971 |
|
SU298925A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU377102A1 |
| ПНЕВМАТИЧЕСКИЙ ДВУХКАНАЛЬНЫЙ ОПТИМИЗАТОР | 1972 |
|
SU419849A1 |
| ПНЕВМАТИЧЕСКИЙ АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР С ПЛАВАЮЩЕЙ СИСТЕМОЙ ОТСЧЕТА | 1968 |
|
SU217496A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР ДЛЯ УПРАВЛЕНИЯ СЕПАРАТОРОМ | 1970 |
|
SU282046A1 |
| ЦИФРОВОЙ АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР | 1971 |
|
SU320469A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ МОЩНОСТИ:!оюзя-°-^'-^^•^?ПНП-.ТслНл^;::^:^:;:| | 1972 |
|
SU351170A1 |
| Многоканальный автоматический оптимизатор | 1978 |
|
SU746417A1 |
L1J
ГТ
11
./7,UJ
./
iJ
i(.
h s .1
u.
i
.i /y
.C- .
/;
i
I Г--
i-i I1
К I
l. I ;.
.-1C L i .. Li /
i Iv
-: ; .---s-r-iI i L.,J
5
Y:::
