Изобретение относится к кузиечно-прессовому машиностроению и предназначено для использования в качестве оборудования для свободной ковки.
Известен пресс с гидромеханическим приводом, содержащий станину, боек, соединенный посредством кривошипно-шатунного .механизма с приводом, гидроцилиндр управления одо.м бойка, надиоршневая и подпоршневая полости которого соединены трубопровода.ми через управляющий золотник с источником высокого давления.
Описываемый пресс отличается от известного тем, что, с целью увеличения производительпости и обеспечения удобства обслуживапия, гидроцилиндр управления установлен в предусмотренных на станине направляющих i жестко соединен с бойко.м, а щток порщня его выполнен полым и в нем установлена с возможностью перемещения ползущка, соединенная с шатуно.м крнвощинного .механиз.ма нривода.
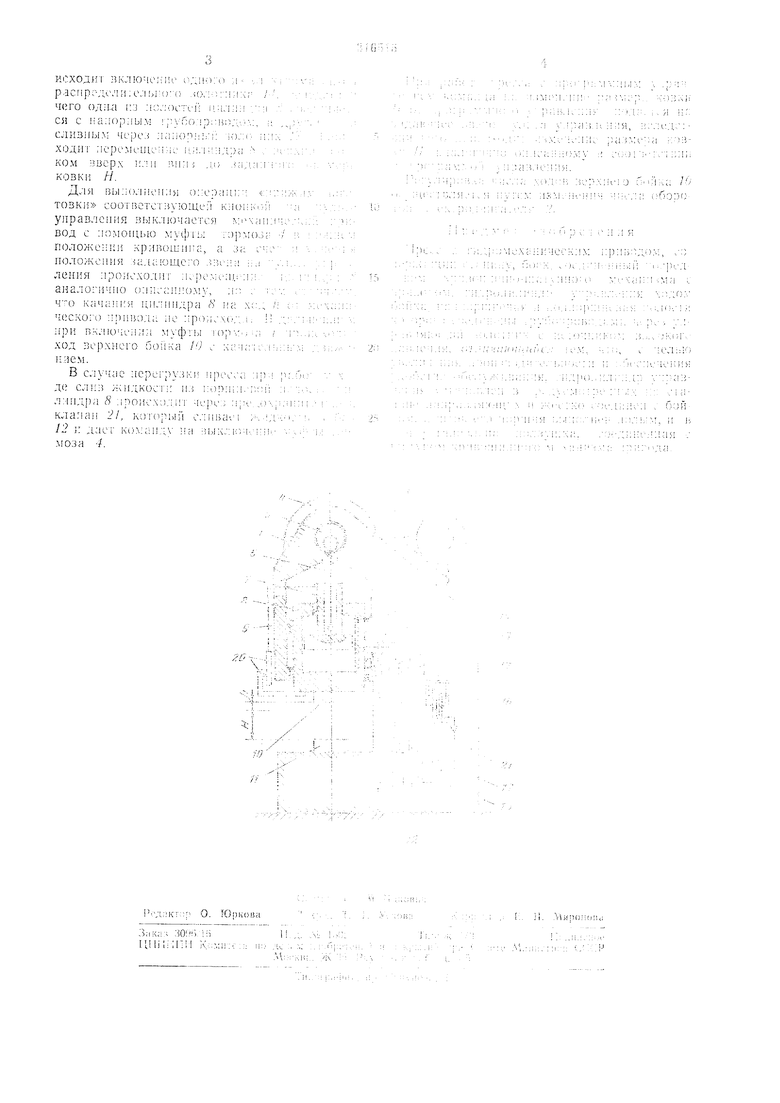
На чертеже представлен описывае.мый пресс.
Пресс и.меет стапину 1 с .механическим приводом, состоящим из электродвигателя 2, клиноременной передачи 3, муфты тормоза 4, эксцеитрикового вала 5, пиатуна 6, щарнирно соединенного со щтоком поршня 7. Порщень расположен внутри цилиидра 8 управления, который перемещается в паправляющих 9. ВерхПИЙ боек 10 закреплен на цилиндре 8, а нижний боек 11 - па станине.
Управление полостя.ми цилиндра 8 осуществляется от гидропривода, имеющего бак 12, гидронасос 13, распределительный золотник 14 и управляемые (.мер, от электромагнитов) обратные клапаны 15.
Подвод жидкости к подвижному цилп}1дру производится, например, через телескоп /6.
Иапорпый золотник 17 обеспечивает подпор жидкости в сливных полостях цилиндра 8. Обратный клапан 18 предохраняет от гидроудара гидронасос и при включенном распределительном золотнике 14 в момент рабочего хода цилиндра 8. Предохранительный клапан 19 предохраняет гидросистему от перегрузок. Датчик 20 контролирует положение цилипдрл 6 с бойком 10 относительно дифференциального порщня 7, т. е. разрез ковки Н.
При включенно.м механическом приводе цп,iJiiuTp 8 совершаег качате.тьные движения ini величину /г.
Для изменения размера ковки Я на пульте управления изменяется положение задаюпюго
звена (например, сельсипа), измепелпе положен;1я задающего звена контролируемся соответствующей щкалой на пульте управления. По рассогласования между задающим звеном пульта управления и дагчпком 20
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство осевого перемещения хобота ковочного манипулятора | 1971 |
|
SU682317A1 |
| ПРЕСС КОВОЧНЫЙ, МЕХАНОГИДРАВЛИЧЁСКИЙ | 1968 |
|
SU212026A1 |
| СИСТЕМА КОМПЕНСАЦИИ ПОГРЕШНОСТИ ОБЕСПЕЧЕНИЯ КОВОЧНОГО РАЗМЕРА РАДИАЛЬНО-КОВОЧНОЙ МАШИНЫ | 2003 |
|
RU2241566C2 |
| ГИДРАВЛИЧЕСКИЙ КЛЕПАЛЬНЫЙ ПРЕСС | 1966 |
|
SU184114A1 |
| Радиально-ковочная машина | 1976 |
|
SU692664A1 |
| КУЗНЕЧНЫЙ МОЛОТ С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 2012 |
|
RU2505375C1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| Система включения режимов работы гиравлического пресса | 1977 |
|
SU692740A1 |
| Система управления гидравлическим прессом | 1982 |
|
SU1141019A1 |
| Гидравлический пресс | 1977 |
|
SU737242A1 |
