Известно устройство для переключения привода подачи инструмента с быстрого подвода на рабочую подачу, шпиндель и инструментальная оправка которого снабжены базирующими поверхностями, выполненными в виде конуса, а сигнал на переключение подается от датчика касания инструмента с деталью.
Однако применение известного устройства приводит к возникновению больших ударных нагрузок на инструмент в момент соприкосновения. Это приводит к преждевременному выходу инструмента из строя, а также к занил ению скорости быстрого подвода, снижающему производительность станка. Большие ударные нагрузки происходят из-за того, что инструмент в момент соприкосновения с деталью должен воспринять инерционные усилия от торможения не только своей собственной массы, но также и массы пиноли со шнинделем, которая в несколько раз превышает массу инструмента; в случае использования высоких скоростей быстрого подвода увеличивается энергия удара и резко снижаются точностные характеристики системы.
Целью предлагаемого устройства является защита инструмента от поломок в момент касания детали путем уменьшения энергии его удара о деталь.
тельными цилиндрическими поясками, предварительно базирующими инструментальную оправку в шпинделе и позволяющ1 ми ей перемещаться относительно шпинделя, воздействуя тем самым на датчик касания.
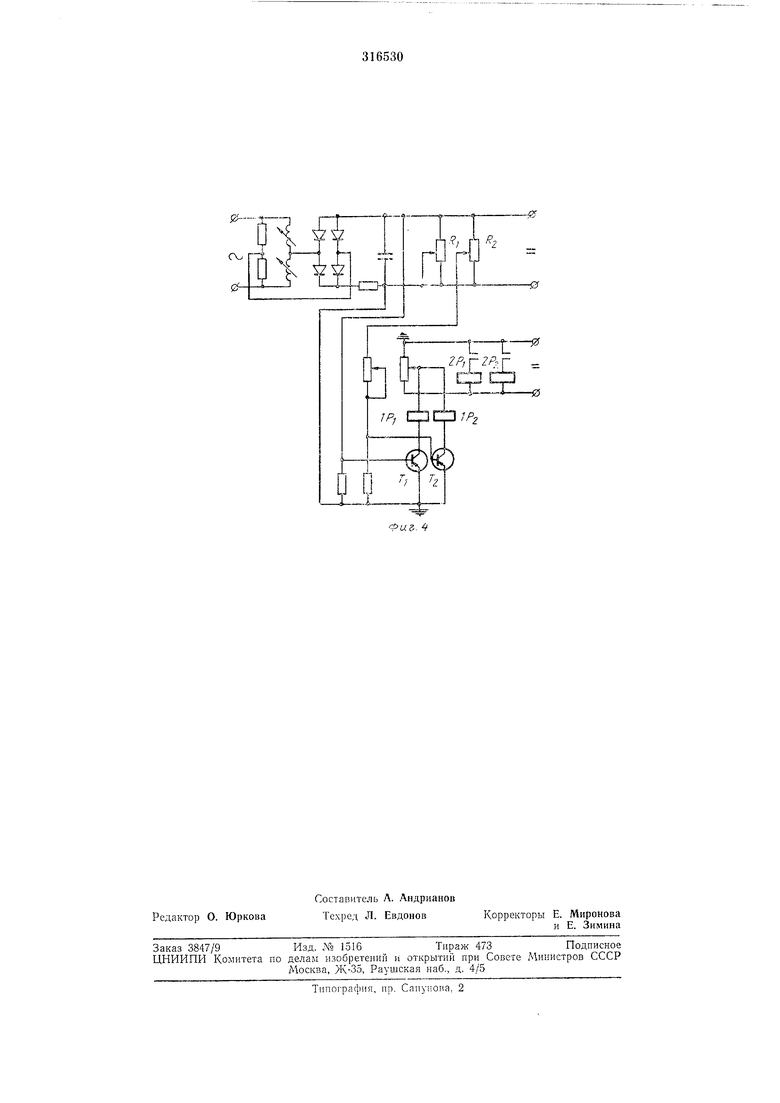
На фиг. 1 изображено предлагаемое устройство в исходном положении; на фиг. 2 - то же, в рабочем положении; на фиг. 3 - датчик касания инструмента с деталью; на фиг. 4- измерительная схема датчика.
Шпиндель / помещен в корпусе 2 на подшипнпках 3 и соединен с приводом вращения через шестерню 4. Внутр шпинделя находится втулка 5, несущая захват 6, например шаРиковый. Между .втулкой и шпи1нделем размещена натяжная пруж1И)1а 7. Позади втулки располагается нажимное кольцо 8 механизма инструмента (на чертеже не показан). На передней части шпинделя укреплено кольцо 9, которое предварптелыю базирует передпюю цилиндрическую шейку и нструмептальной оправки 10. За копнческим гнездом // шпинделя пмеегся цилПНдр;1ческое отверстпе 12, которое также служит предварительной базой для оправкп W. В отверстии втулкн помещен стержень 13, Который контактирует с датчиком 14 касания н поджимается вперед пружиной 15.
между неподвижными сердеч:Ника-МИ 19 и 20. Катушки /7 и 18 включе иы в соседние плечи измерительного моста (см. фиг. 4). Пр:Н иеремси еиии 11одвижно1о сердечника одновремег 110 измеияются нлощади воздушных зазоров между подвижным сердечииком и каждо; из катушек i величины торцовых воздушных зазо)ов между подвижным и неподвижпыми сердечниками. При уменьшении илощади зазора между сердечиикамн 6 ai 19 И;1дуктив1 ость кагушк-и /7 резко уменьшается. При увелнчеНии нлощади зазора между катуи:1кой 18 и сердечНнком 16 и уменьшении -величины зазора между ее1рдечникам.и 16 и 20 индукт1ивпость катушки 18 резко увелнчивается. Ток разбаланса измерительного моста после выИрямления сравниваетсяС онориым током противоположного иаиравления от стабилизированиого источника нитаиия. Разность этих сигналов управляет пороговыми транзисториыми усилителям-и Г и TZ, на выходе котор1 1х иеполнктельиые ноляризованиые реле 1Р и IPz, унравляюш;ие приводом подачи и выдаюш,1ие комаиду иа зажим инструмента н начало отсчета координат в систему програмг.пюго управления. Обмотки 2Р и 2Р-2 реле служат для сброса намяти выданных ко:аа; д.
Моментами огни-рания пороговых усилителей управляют нотенциометры /. и R- отбора величины o HOpiioi-o тока от стабил нзированного иеточН|Ика нитаиия, которые позволяют нолучать необходимые команды в любых заданных точках по Пути инструме-ита.
Во время смены ииструмента Иажимное ко.льцо 8 перемещается вперед и передвигает Втулку 5, преодолевая со.прогивлсние лружины 7. Прн этом захват 6 раскрывается и освобождает инструмегг.
При установке нового инструмента ш-ктруме1гг.тьная о-нранка 10 вводится в шпиндель, опираясь с некоторым зазором своими цилиндрическими нояСКами иа поверхность кольца 9 И отверстия 12. После этого нажимное кольцо отходит в Т1ромежуточпое положеиИе, иоказанное iia . 1. В даниом положении и 11струмент, захваченный захватом 6, но не затянутый Иружиной 7, илгеет возможиость перемещаться в осевом ианравленин на некоторую величину. Инструмент удерживается в переднем положении усилием пружины 15, которое Передается через стержень 13. В этом
положении механизма осуществляется быстрый подвод инструмента к изделию.
Прн касании инструмента обрабатываемой детали инструмент вместе с oiipaBKou 10 начпет иеремещаться Назад по отношению к шпииделю и датчику 14. При зтом стержень 13 перемещает подвижный сердечник датчика, который даст снгиал о касанни инструмента с деталью. Существенно, что при соприкосновении энергия удара невелика, так как в ударе участвуют лишь массы инструмента, оправки и стержня, тогда как масснВНая бабка или пиноль со шпинделем продолжают движение. Прн касании инструмента с деталью отнирается транзисторпый усилитель Г и выдается
первая команда, которая используется для
перехода Шпи-нде.тьной бабки На замедленную
скорость.
Далее по ходу инструмента отпирается
транзистор Т, выдавая вторую команду, которая используется для зажима инструмента, включения вращения ишинделя и начала отсчета -коордниаты в системе программного управления.
Затяжка инструмента производится пружиной 7 при отходе нажимного кольца 8 в крайнее заднее положение (см. фиг. 2) через втулку 5 и захват 6. При этом онравка 10 с инструментом перемещается в осевом нанравлеНИИ по цилиндрическим поверхностям кольца .9 и отверстия 12 и окончательно базируется своим коническим хвостовиком в коиическом гнезде // щиинделя.
Предмет изобретения
Устройство для нереключе-ния привода нодачи инструмента с быстрого подвода иа рабочую подачу, шпиндель и инструментальная Онравка которого снабжены -базирующими новерхностями, выполненными в Виде конуса, а сигнал на переключение подается от датчика касания инструмента с деталью, отличающееся тем, что, с целью защиты инстру.мента от поломок в момент касания детали путем
уменьшення энергии его удара о деталь, щпиИдель и ИНСтруме)Г1альной ои.разкн снабжены дополнительными цплиндричеС.кими iioясками, нредвар ггелыю базирующим ПНструмептальпую онравку в Шпинделе ai нозволяюш.ими ей перемещаться относительно щиинделя, воздействуя тем самым на датчик касания.
65
/; li 6
l,i /
./7P77/
ws /;
Tk л / i .- -.
I Y ..,., iX.
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для КОНТРОЛЯ НАГРУЗКИ НА ИНСТРУМЕНТ ПРИ ГЛУБОКОМ СВЕРЛЕНИИ | 1973 |
|
SU385680A1 |
| Устройство переключения привода инстру-MEHTA C быСТРОгО пОдВОдА HA РАбОчуюпОдАчу | 1977 |
|
SU841797A1 |
| ОПРАВКА | 1972 |
|
SU435073A1 |
| Шлифовальный коленно-рычажный станок | 1977 |
|
SU662324A2 |
| ПАТГЛТНО- ^г.г; х?:нчсс::л;;ЬИ?Л?!СТЕКАШ:10 | 1966 |
|
SU185183A1 |
| Полуавтомат для снятия заусенцев | 1984 |
|
SU1171213A1 |
| МНОГОЦЕЛЕВОЙ СТАНОК | 2014 |
|
RU2556180C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ЦЕНТРОВАНИЯ ЗАГОТОВОК ТИПАВАЛОВ | 1972 |
|
SU344939A1 |
| УСТРОЙСТВО для МЕХАНИЗИРОВАННОГО КОНЦЕВОГО ИНСТРУМЕНТА | 1973 |
|
SU405666A1 |
| МАНИПУЛЯТОР ДЛЯ АВТОМАТИЧЕСКОЙ СМЕНЫ ИНСТРУМЕНТОВ | 1973 |
|
SU407708A1 |

J2t--t
