1
Изобретение относится к машиностроению и может быть применено на станках расточной группы с числовым программным управлением для автоматической смены инструментов.
Известны манипуляторы для автоматической смены инструментов с установленной на валу двухзахватной поворотной рукой, угловое положение которой в отдельных фазах рабочего цикла ограничивается упорами.
Предлагаемый манипулятор отличается тем, что упоры выполнены в виде скользящего вдоль оси вала блока, состоящего из двух дисков с прорезями, каждый из которых при поступательном перемещении блока попеременно взаимодействует с жеским упором, закрепленным на корпусе устройства.
Это позволяет упростить конструкцию и повысить ее надежность.
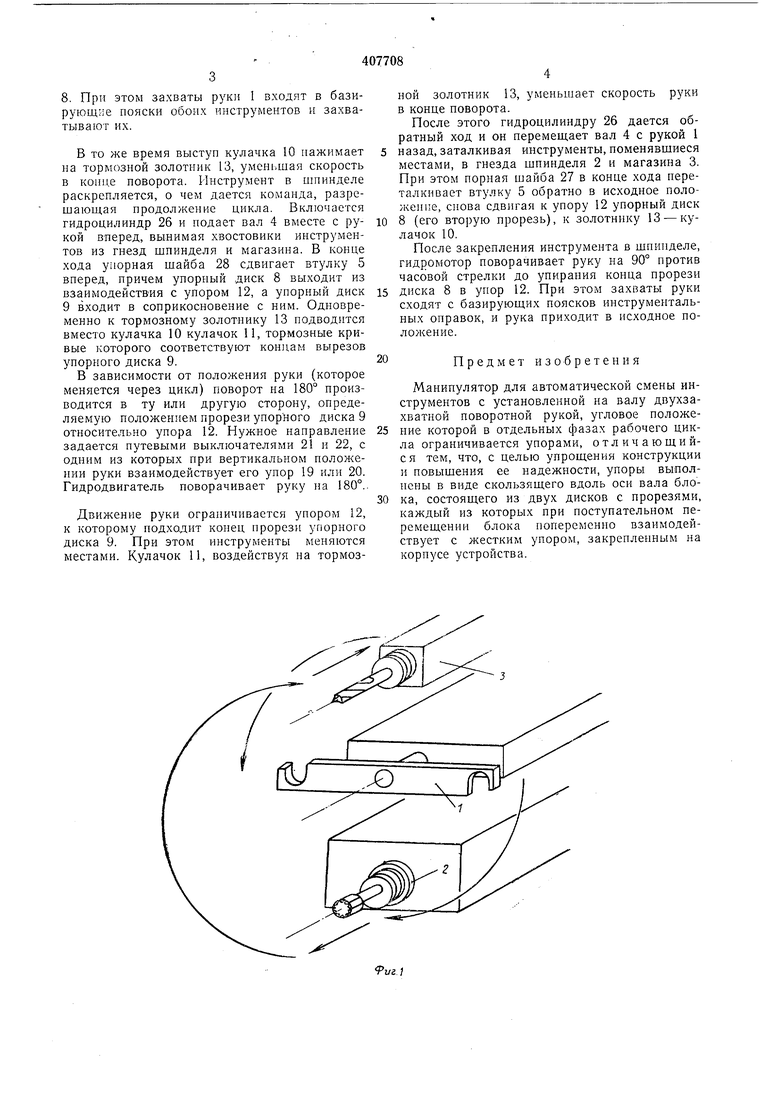
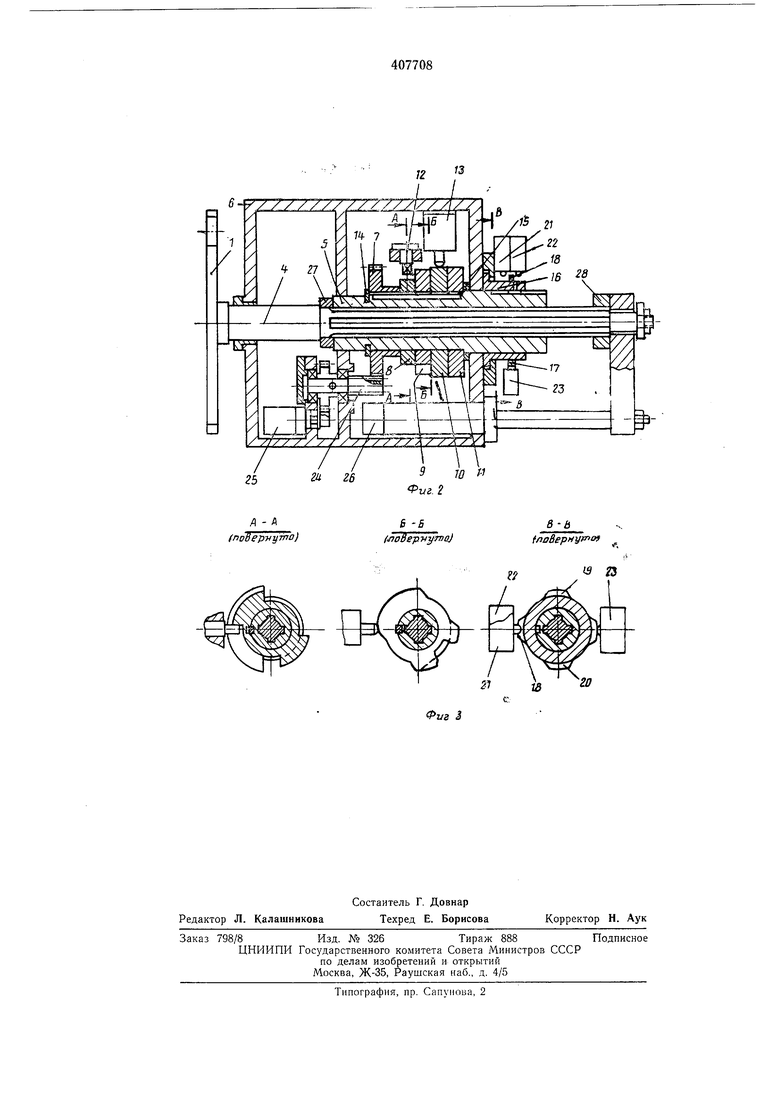
На фиг. 1 изображен манипулятор; на фиг. 2 - то же, продольный разрез; на фиг. 3 - разрезы по А - А, Б - Б и В - В на фиг. 2..
Двухзахватная рука 1 располагается между шпинделем станка 2 и загрузочной позицией магазина 3. Рука 1 лсестко закреплена на шлицевом валу 4, размещенном в шлицевой втулке 5, которая смонтирована в расточках корпуса 6.
На втулке жестко закреплены зубчатое колесо 7, упорные диски 8 и 9 с вырезами, а также тормозные кулачки 10 и 11. На корпусе 6 закреплен упор 12 и гидравлический тормозной золотник 13. Осевое перемещение втулки 5 ограничивается шайбами 14 и 15. Со втулкой 5 скользящей шпонкой связан барабан 16, который удерживается от осевого перемещения и несет уноры 17-20, взаимодействующие с путевыми выключателями 21-23.
Зубчатое колесо 7 находится в зацеплении с удлиненной шестерней 24, связанной зубчатой передачей с гидромотором 25. С концом вала 4 связан гидроцилиндр 26. На валу 5 жестко закреплены упорные шайбы 27 и 28.
Исходное перед началом цикла смены инструмента положение руки 1 горизонтальное, причем ее захваты находятся в одной вертикальной плоскости с базирующими поясками инструментов, один из которых (отработавший) расположен в шпинделе 2, а другой, (необходимый для следующей операции) - в загрузочном гнезде магазина 3. При этом осевое положение втулки 5 определяется шайбой 15 втулки я шайбой 27 вала 4.
В начале цикла включается гидромотор 25, который через зубчатую передачу поворачивает колесо 7 вместе со втулкой 5, валом 4 и рукой 1. Рука поворачивается на 90°, после чего ее движение ограничивается упором 12, к которому подходит конец выреза упорного диска
8. При этом захваты руки 1 входят в базирующие пояски обоих инструментов и захватывают их.
В то же время выстуи кулачка 10 иажимает на тормозной золотник 13, уменьшая скорость в конце поворота. Инструмент в шпинделе раскрепляется, о чем дается команда, разрешающая продолжение цикла. Включается гидроцилиндр 26 и подает вал 4 вместе с рукой вперед, вынимая хвостовики инструментов из гнезд шпинделя и магазина. В конце хода упорная щайба 28 сдвигает втулку 5 вперед, причем упорный диск 8 выходит из взаимодействия с упором 12, а упорный диск 9 входит в соприкосновение с ним. Одновременно к тормозному золотнику 13 нодводится вместо кулачка 10 кулачок 11, тормозные кривые которого соответствуют концам вырезов упорного диска 9.
В зависимости от положения руки (которое меняется через цикл) поворот на 180 производится в ту или другую сторону, определяемую положением прорези упорного диска 9 относительно упора 12. Нужное направление задается путевыми выключателями 21 и 22, с одним из которых при вертикальном положении руки взаимодействует его упор 19 или 20. Гидродвигатель поворачивает руку на 180°..
Движение руки ограничивается упором 12, к которому ПОДХО.ДИТ копец прорези упорного диска 9. При этом инструменты меняются местами. Кулачок 11, воздействуя на тормозной золотник 13, уменьшает скорость руки в конце поворота.
После этого гидроцилиндру 26 дается обратный ход и он перемещает вал 4 с рукой 1
назад, заталкивая инструменты, поменявшиеся местами, в гнезда шпинделя 2 и магазина 3. При этом порная шайба 27 в конце хода переталкивает втулку 5 обратно в исходное положение, снова сдвигая к упору 12 упорный диск
8 (его вторую прорезь), к золотнику 13 - кулачок 10.
После закрепления инструмента в шпипделе, гидромотор поворачивает руку на 90° против часовой стрелки до упирания конца прорези
диска 8 в упор 12. При этом захваты руки сходят с базирующих поясков инструментальных оправок, и рука приходит в исходное положение.
Предмет изобретения
Манипулятор для автоматической смены инструментов с установленной на валу двухзахватной поворотной рукой, угловое положение которой в отдельных фазах рабочего цикла ограничивается упорами, отличающийся тем, что, с целью упрощения конструкции и повышения ее надежности, упоры выполнены в виде скользящего вдоль оси вала блока, состоящего из двух дисков с прорезями, каждый из которых при поступательном перемещении блока попеременно взаимодействует с жестким упором, закрепленным на корпусе устройства.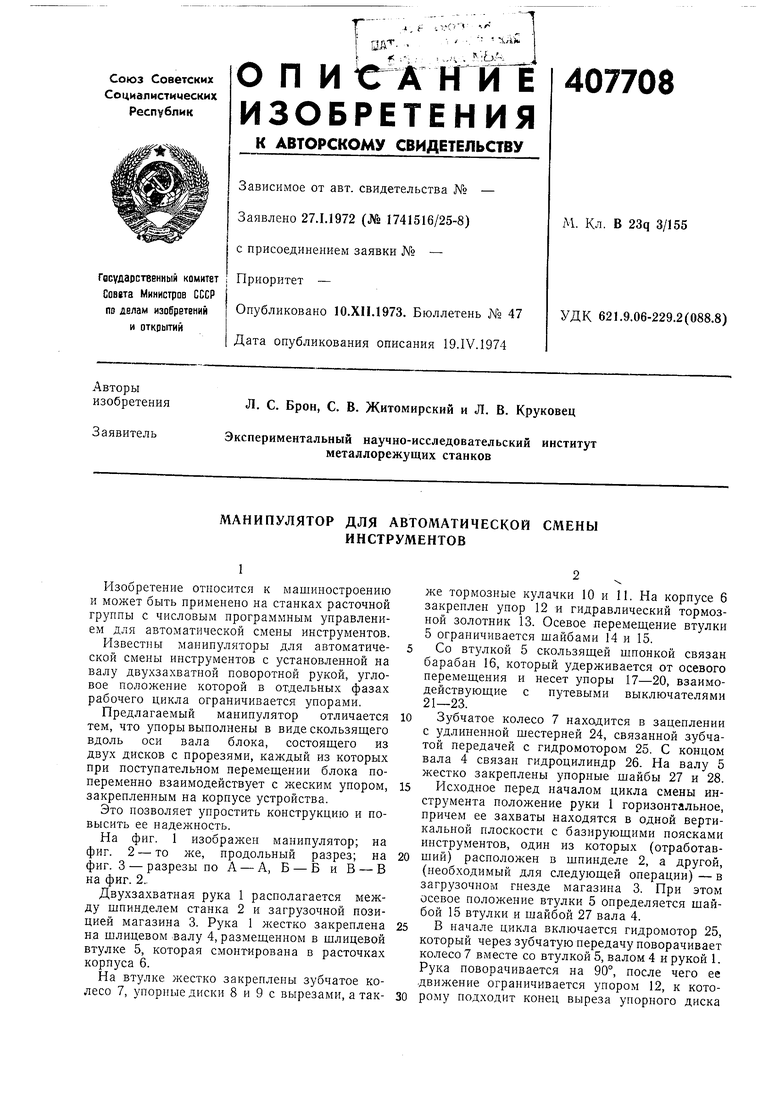
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматической смены инструмента | 1983 |
|
SU1117182A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ПЕРЕДАЧИ ИНСТРУМЕНТА | 1973 |
|
SU375156A1 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Устройство для автоматической смены инструментов на металлорежущем станке | 1981 |
|
SU1034869A1 |
| Устройство для автоматической смены инструментов | 1978 |
|
SU768597A1 |
| Устройство для автоматической смены инструментов | 1979 |
|
SU854676A1 |
| Устройство для автоматической смены инструмента и инструментальных головок на металлорежущем станке | 1987 |
|
SU1481026A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Манипулятор для автоматической смены инструментов | 1980 |
|
SU867601A1 |
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
А - Д (ловернуто)
В -Б
8-Ь /лоВет уупа} (лаВер у
13 23
21ig °
