Предлагаемая система предназначена для управления механизмами с замкнутым технологическим циклом, например гидравлическими прессами-автоматами.
Известные системы автоматического управления гидравлическими прессами связаны с применением гидравлических многопозиционных распределителей, имеющих электрогидравлический привод. В таких системах команды на срабатывание привода гидравлического многопозиционного распределителя поступают через контакты электрических командных датчиков, контролирующих положения подвижных механизмов пресса, электрического командоаппарата, выполняющего роль формирователя командных датчиков, т. е. избирающего своими контактами только те командные датчики, из -общего числа их, которые предназначены контролировать состояние механизмов пресса в каждом этапе рабочего цикла. Промежуточный электрический командоаппарат, расположенный между командными датчиками и приводом гидравлического многопозиционного распределителя, усложняет схему управления прессом.
Описываемая система отличается от известных тем, что она снабжена электрическими блоками, число которых равно числу исполнительных механизмов пресса, при этом каждьи из блоков включает тиристор, на управляющий электрод которого подключены командные датчики исходного и конечного положения исполнительного механизма, соединенные последовательно между собой и с
приводом гидравлического многопозиционного распределителя. Эта система обеспечивает автоматический цикл работы пресса.
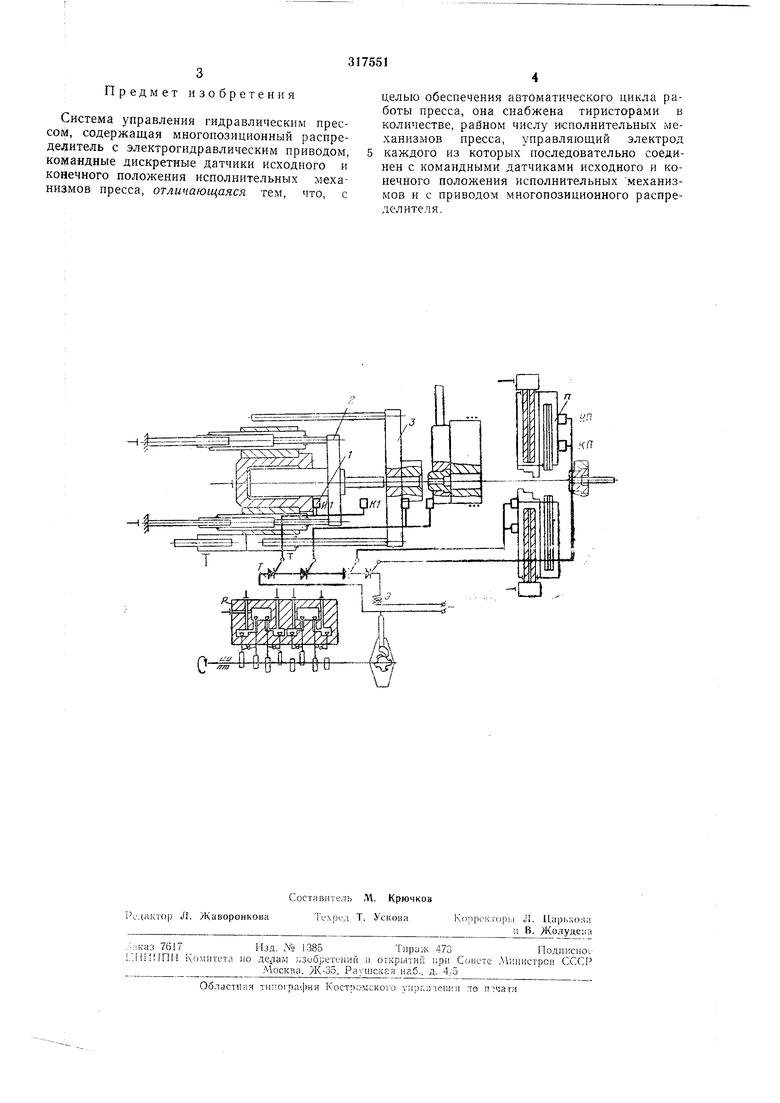
На чертеже изображена система управления гидравлическим прессом-.
Система управления включает в себя командные датчики У исходного положения И1-ИП и конечного положения К1-КП, установленные на исполнительных механизмах 2,
3,..., п пресса, тиристоры Г, электрогидравлический привод Э и гидравлический распределитель Р.
Работает система управления следующим образом. Включая электромагнит, переводят
вал гидравлического многопозиционного распределителя в последующую позицию для осуществления следующего этапа рабочего цикла. Эле тричсская цепь составлена тиристорами, открывающимися при наличии сигпалов командных датчиков исходного или конечного положения исполнительных механизмов, закончивших действие в предыдущих этапах рабочего цикла, и сигнала датчика, заканчивающего действие в данном этапе раПредмет изобретения Система управления гидравлическим прессом, содержащая многопозиционный распределитель с электрогидравлическим приводом, командные дискретные датчики исходного и конечного положения исполнительных механизмов пресса, отличающаяся тем, что, с целью обеспечения автоматического цикла работы пресса, она снабжена тиристорами в количестве, рабном числу исполнительных механизмов пресса, управляющий электрод ланизмив upct;i;a, упраилшищпи o jicMt;uA каждого из которых последовательно соединен с командными датчиками исходного и ковечного положения исполнительных механизмое и с приводом многопозиционного распределителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гидравлическим прессом | 1978 |
|
SU747741A1 |
| ВСЕСОЮЗНАЯ IПАТЕйТНО-Т?}(НИ«ЕС^{Д,я1toilbJlHC.)^ f-KA | 1972 |
|
SU359564A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ | 1971 |
|
SU302256A1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ДВУХДИАПАЗОННОЙ КОРОБКОЙ ПЕРЕДАЧ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2424927C1 |
| Винтовая передача В.И.Козаренко | 1988 |
|
SU1645181A2 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ | 1969 |
|
SU251366A1 |
| Устройство для управления секцией гидрофицированной крепи | 1989 |
|
SU1705589A1 |
| В ПТБJ.j.t^ ./,',IV vr, J-Jwulb^^^i' I 'jt^ | 1973 |
|
SU370375A1 |
| Устройство управления гидроприводом шахтной многосекционной крепи | 1980 |
|
SU905487A1 |
| Двухканальная система управления механизированной крепью | 1989 |
|
SU1710771A1 |
Тт 1 Г ,
