Изобретение относится к области управления кузнечно-прессовыми машинами, а точнее к управлению гидравлическими прессами.
Известна система управления гидравлическим прессом, содержащая гидравлический командоаппарат, выполненный в виде многозолотникового распределителя, соединенного посредством кулачкового вала с электродвигателем, датчики с магнитоуправляемыми контактами и расположенный между ними на кулачковом валу механизм фиксации угловых позиций последнего, а также контактор, командные датчики, установленные на исполнительных механизмах пресса, и задающее устройство. Для фиксации угловых позиций вала применена металлическая пластина, по ширине равная щирине датчика, что требует применения запоминающих элементов в схеме управления приводом.
Однако в известной системе для перевода кулачкового вала в последующую позицию при работе пресса в автоматическом либо в любую промежуточную позицию при работе пресса в ручном режиме привод совершает помимо рабочего холостой ход, что уменьшает полезное (рабочее) время технологического цикла и, следовательно, снижает производительность пресса.
чить производительность пресса путем исключения холостых ходов привода.
Это достигается тем, что механизм фиксации угловых позиций кулачкового вала выполнен
в виде скрепленных через изоляционную прокладку металлического диска с вырезом, равным ширине одного из датчиков с магнитоуправляемым контактом, и сектора, длина дуги которого равна угловому расстоянию между
двумя соединенными датчиками с магнитоуправляемыми контактами.
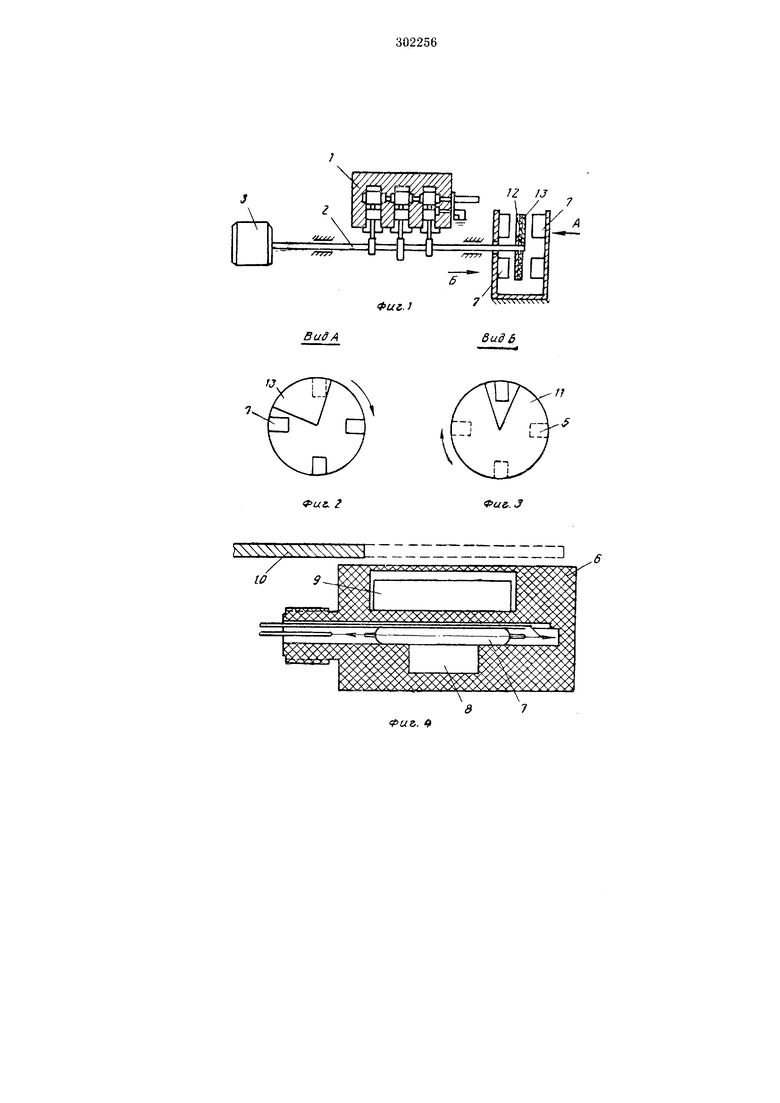
На фнг. 1 дана конструктивная схема предлагаемой системы управления; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - вид
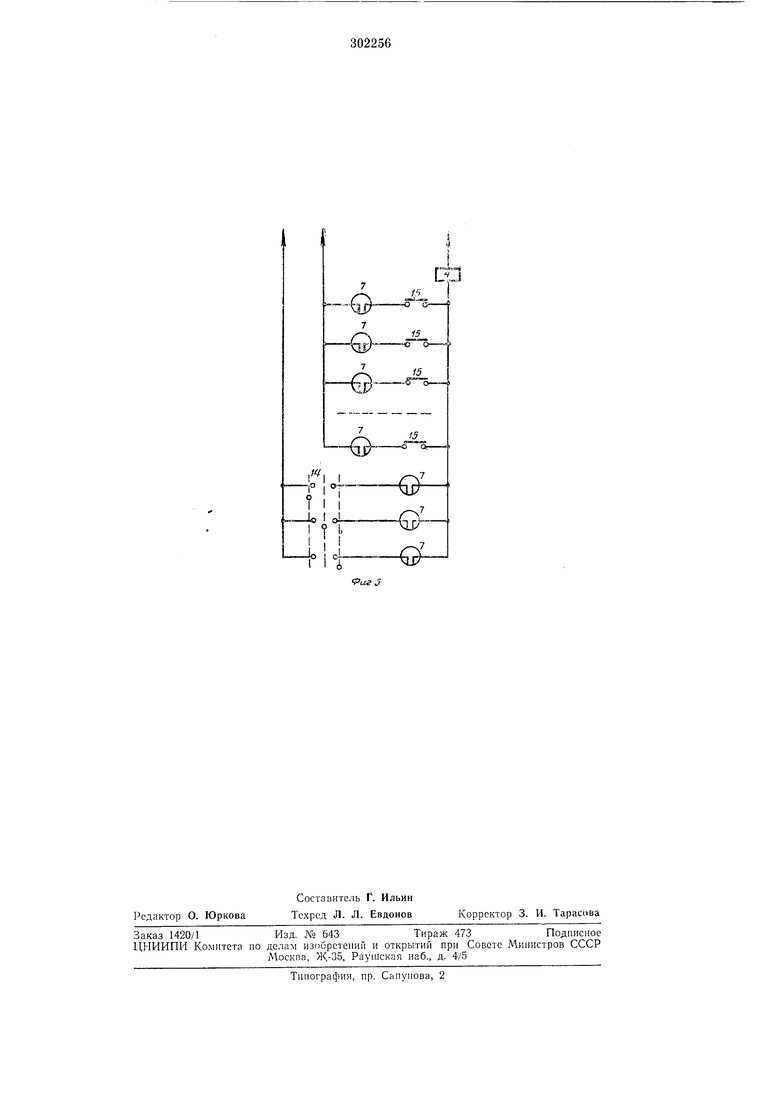
но стрелке Б; на фиг. 4 - конструктивная схема бесконтактного датчика; на фиг. 5 - электрическая схема системы управления.
Система управления прессом содержит золотниковый распределитель /, кулачковый вал
2, электродвигатель 5 с контактором 4, бесконтактные датчики 5, состоящие из корпуса 6, выполненного из немагнитного материала, магнитоуправляемого контакта 7, постоянного магнита 8 возбуждения, постоянного магнита
9 смещения и условно показанного какого-нибудь механизма пресса 10. Механизм фиксации угловых положений состоит из мегаллического диска 11 с вырезом, в котором размещается один выщеупомянутый датчнк, нзокоторого выполнена равпон угловому расстояHHJo между бесконтактными датчиками. Кроме того, система включает задающее устройство 14 и командные датчики /5.
В исходном положении магиитоуправляемый контакт 7 разомкнут, вследствие того, что нейтральная ось магнитного поля, образуемая магнитом смещения и магнитом возбуждения проходит по продольной оси магиитоуправляемого контакта. При появлении датчиком механизма пресса 10 (или любой ферромагнитпой детали) со стороны постоянного магнита смещения последний перемеп ается в сторону детали, смещая тем самым нейтраль магнитного поля. Магнитоуправлясмый контакт 7 замыкается.
Механизм, фиксирующий угловые позигии кулачкового вала, работает следующим образом. Поворот вала 2 обеспечивает вращение закреиленных на нем диска 11 и сектора 13, устанавливая их против соответствующих датчиков 5, в результате чего последние замыкают магнитоуправляемые контакты 7 (см. фиг. 2), которые затем используются в цепи контактора 4 и электродвигателя 3-привода кулачкового вала.
Диск 1 обеснечивает замкнутое состояпие всех датчиков 5, кроме одного, который располагается против выреза в диске и контролирует в данный момент соверщаемый этап рабочего цикла пресса.. Поворачиваясь, диск П поочередно размыкает датчики, попадающие в зону действия выреза.
При повороте вала сектор 13 (см. фиг. 3) обеспечивает замкнутое состояние датчика 5 совершаемого этана до окончательного перевода вала в последующую позицию. Выход сектора 13 из зоны действия датчика соверщаемого этана обеспечивает его отключение, что приводит к остановке кулачкового вала.
Электросхема работает следующим образом. В автоматическом режиме работы пресса сключе ;ие контактора 4 - электродвигателя 3, т. е. перевод кулачкового вала в следующие позиции, и соверщепие еледуюн его этапа рабочего цикла происходит ири замыкании контакта 7 датчика 5, контролирующего совершаемый этап рабочего цикла, командных датчиков 15, контролирующнх окончание действий исиолиитсльных механизмов, работающих в соверщаемом этане рабочего цикла.
Отключение контактора 4 - электродвигатели 3, т. е. остановка кулачкового вала происходит при размыкании контакта 7 датчика 5
соверщаемого этана рабочего цикла.
В наладочном режиме работы иресса вклю1:ение контактора 4 - электродвигателя 3, т. е. перевод кулачкового вала в любую позицпю, соверщепие любого этана цикла происходит по цени, составленной контактом задающего устройства 14, замкнутого в избранной позиции и последовательно подключенного с ним коптакта 7, контролирующего избранную позицию. Отключение контактора
4 - электродвигателя 3, т. е. остановка кулачкового вала в любой избранной позиции, пропсходит при размыкании контакта 7 датчика 5, контролирующего избранную нозицию.
.Предмет изобретения
Система управления гидравлическим прессом, содержащая золотниковый распределитель, соединенный посредетвом кулачкового вала с электродвигателем, датчики с магнитоуправляемыми контактами и расположенный между ними на кулачковом валу механизм фикеации угловых позиций последнего, а также контактор, командные датчики, установленные на исполнительных механизмах пресса, ц задающее устройство, отличающееся тем, что, с целью повыщения производительности пресса, механизм фиксации угловых позиций кулачкового вала выполпен в виде скрепленных через пзоляционную прокладку металлического диска с вырезод:, равным щирине одного из датчиков с магнитоуправляемым контактом, и сектора, длина дуги которого равна угловому расстоянию между двумя соседними датчиками с магиитоуправляемыми контактами.
Вид А
Фиг. I
Вид 6

| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ КОМАНДОАППАРАТ | 1968 |
|
SU209088A1 |
| Устройство ввода команд | 2018 |
|
RU2679745C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МАШИНЫ | 2002 |
|
RU2234185C1 |
| Устройство ввода команд для системы управления винторулевой колонкой судна | 2023 |
|
RU2800615C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ | 1969 |
|
SU251366A1 |
| Устройство для контроля местонахождения струга в лаве | 1979 |
|
SU883408A1 |
| Устройство для контроля скорости вращения вала | 1989 |
|
SU1705813A1 |
| Многоканальный переключатель | 1984 |
|
SU1238226A1 |
J.
