Изобретение относится к дождевальной технике и может быть использовано для стабилизации дождевальных ферм, установленных на движущихся объектах (тракторах, самоходных шасси и т. п.), особенно для ферм малой жесткости и с большим размахом консолей.
Известен способ стабилизации углового положения объекта с -помощью датчика угла поворота, установленного на самом стабилизируемом объекте, по которому устранение колебаний объекта от всех возмущающих воздействий, в том числе и от колебаний движителя, производится по сигналу с датчика углового положения стабилизируемого объекта на исполнительный элемент.
Существенным недостатком известного способа стабилизации, особенно для ферм невысокой механической прочности и с большим моментом инерции, например фермы ДДА100М, является действие на ферму суммы всех возмущающих моментов - и от внешних (М возм. внешний) факторов (неравномерность заполнения водой, соприкосновение фермы со стеблями орошаемых культур и пр.), и от движителя при перемещении его по неровной дороге (М возм. трактора). Последнее составляет большую часть всех возмущений.
возмущающих моментов от движителя на дождевальную ферму.
Достигается это тем, что определяют угловое положение движителя и полученный сигнал суммируют с сигналом отклонения дождевальной фермы от заданного положения непосредственно в цепи управления исполнительным механизмом.
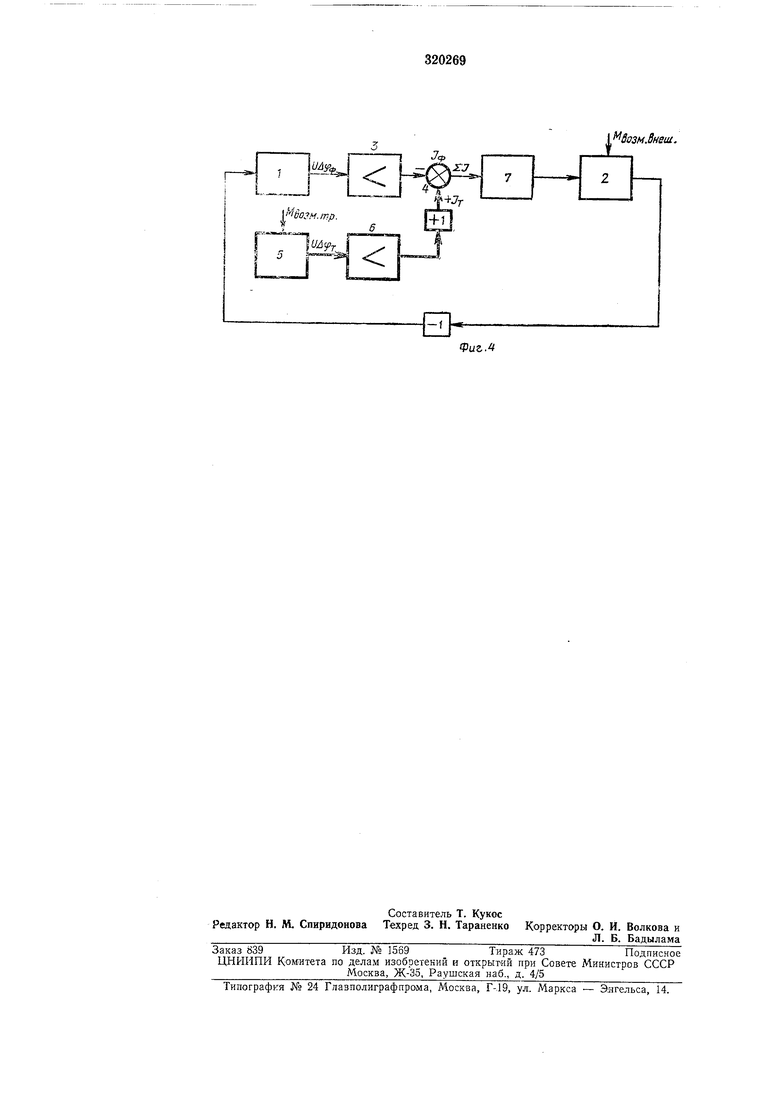
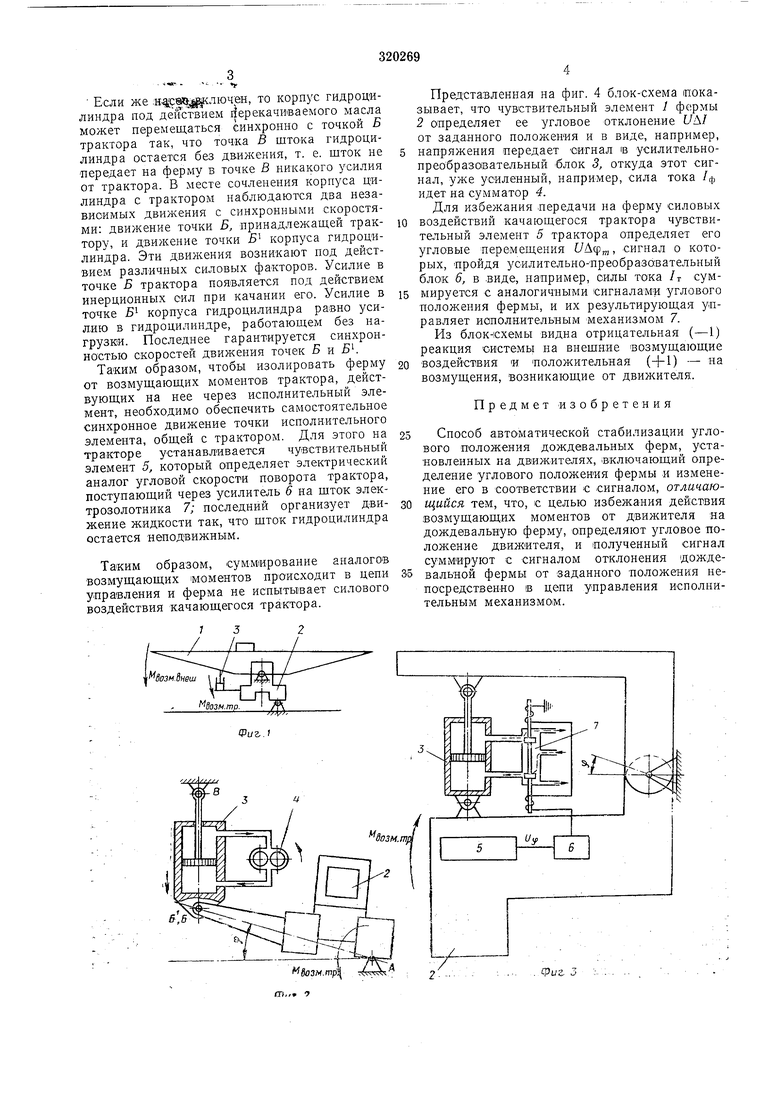
На фиг. 1, 2, 3 изображен механизм осуществления предлагаемого способа; на фиг. 4 - блок-схема.
Способ автоматической стабилизации углового положения дождевальных ферм, установленных на движителях, осуществляется с
помощью механизма, включающего дождевальную ферму J, установленную на тракторе 2, управление положением которой осуществляется гидроцилиндром 3, соединенным с реверсивным гидронасосом 4, так, чтобы была
возможность перекачивать масло гидроцилиндра из одной полости в другую с переменным расходом, пропорциональным, например, угловой скорости поворота трактора относительно точки А.
При выключенном насосе масло «заперто в соответствующих полостях ридроцилиндра, который выполняет роль жесткой тяги, передавая без изменения усилие от точки Б к точке В, и ферма в точке В испытывает влияние Если же -Н св лючен, то корпус гидроцилиндра под действием перекачиваемого масла может перемещаться синхронно с точкой Б трактора так, что точка В штока гидроцилиндра остается без движения, т. е. шток не передает на ферму в точке В никакого усилия от трактора. В месте сочленения корпуса цилиндра с трактором наблюдаются два независимых движения с синхронными скоростями: движение точки Б, принадлежаш,ей трактору, и движение точки корпуса гидроцилиндра. Эти движения возникают под действием различных силовых фаКторов. Усилие в точке Б трактора появляется под действием инерционных сил при качании его. Усилие в точке Б корпуса гидроцилиндра равно усилию в гидроцилиндре, работающем без нагрузюи. Последнее гарантируется синхронностью скоростей движения точек Б и . Таким образом, чтобы изолировать ферму от возмущающих моментов трактора, действующих на нее через исполнительный элемент, необходимо обеспечить самостоятельное синхронное движение точки исполнительного элемента, общей с трактором. Для этого на тракторе устанавливается чувствительный элемент 5, который определяет электрический аналог угловой скорости поворота трактора, поступающий через усилитель 6 на шток электрозолотника 7; последний организует движение жидкости так, что шток гидроцилиндра остается неподвижным. Таким образом, суммирование аналогов возмущающих моментов происходит в цепи управления и ферма не испытывает силового воздействия качающегося трактора. Представленная на фиг. 4 блок-схема покаывает, что чувствительный элемент / фермы определяет ее угловое отклонение t/Д/ от заданного положения и в виде, например, напряжения передает сигнал в усилительнопреобразовательный блок 3, откуда этот сигнал, уже усиленный, например, сила тока /ф идет на сумматор 4. Для избежания передачи на ферму силовых воздействий качающегося трактора чувствительный элемент 5 трактора определяет его угловые перемещения t/Дф, сигнал о которых, пройдя усилительно-преобразовательный блок 6, в виде, например, силы тока /т суммируется с аналогичными сигналами углового положения фермы, и их результирующая управляет наполнительным механизмом 7. Из блок-схемы видна отрицательная (-1) реакция системы на внешние возмущающие воздействия и положительная () - на возмущения, возникающие от движителя. Предмет изобретения Способ автоматической стабилизации углового положения дождевальных ферм, установленных на движителях, включающий определение углового положения фермы и изменение его в соответствии с сигналом, отличающийся тем, что, с целью избежания действия возмущающих моментов от движителя на дождевальную ферму, определяют угловое положение движителя, и полученный сигнал суммируют с сигналом отклонения дождевальной фермы от заданного положения непосредственно в цепи управления исполнительным механизмом.
8озм.8н8ш.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство стабилизации угла наклона рабочего органа планировочной машины | 1984 |
|
SU1167279A1 |
| ДВУХКОНСОЛЬНЫЙ ДОЖДЕВАЛЬНЫЙ АГРЕГАТ | 2002 |
|
RU2222184C2 |
| Дождевальная машина | 1972 |
|
SU440130A1 |
| ДОЖДЕВАЛЬНАЯ МАШИНА | 1970 |
|
SU274527A1 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1328449A1 |
| СПОСОБ ФОРМИРОВАНИЯ ДИРЕКТОРНОГО УПРАВЛЕНИЯ ПО ЭТАЛОННЫМ СИГНАЛАМ МОДЕЛИ ОБЪЕКТА | 2010 |
|
RU2454693C1 |
| СПОСОБ ГИРОСКОПИЧЕСКОЙ СТАБИЛИЗАЦИИ ПЛАТФОРМЫ | 2011 |
|
RU2477834C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ДОЖДЕВАЛЬНЫХ И ПОЛИВНЫХ АГРЕГАТОВвсЕСсюгнАя ПДТЕЙТ110-ТЕУ1Ш'{101?^ | 1972 |
|
SU327891A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU376751A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |