Изобретение относится к гироскопической технике, а именно к управляемым гиростабилизаторам с косвенной стабилизацией, работающим на подвижных объектах и предназначенным для стабилизации положения чувствительных элементов.
Известны способы гироскопической стабилизации, в которых повышение точности гиростабилизатора достигается за счет формирования компенсирующих моментов, разгружающих ось стабилизируемой платформы от возмущающих моментов (патент США №3920199, патенты России №№2011171, 2193160).
Ближайшим аналогом (прототипом) заявляемого изобретения является способ гироскопической стабилизации, описанный в книге Бесекерский В.А, Фабрикант Е.А. Динамический синтез систем гироскопической стабилизации. Л.: Судостроение, 1968, стр.105-124. В известном способе, принятом за прототип, повышение точности гиростабилизатора достигается за счет компенсации возмущающих моментов от вязкого трения в оси подвеса платформы.
Способ-прототип заключается в том, что для стабилизации положения платформы, установленной на основании с возможностью вращения относительно оси, параллельной основанию, определяют угол поворота платформы относительно стабилизируемого положения и скорость изменения угла поворота, затем определяют угловую скорость основания относительно оси, параллельной оси вращения платформы, формируют управляющий сигнал для управления положением платформы, подают управляющий сигнал на исполнительный двигатель и компенсируют моменты, возмущающие стабилизируемую платформу.
В известном способе гироскопической стабилизации управляющий сигнал формируется с использованием угла поворота платформы относительно стабилизируемого положения и скорости его изменения, измеряемых инерциальными датчиками, установленными на платформе. Для уменьшения ошибки от вязкого трения в опорах подвеса платформы к управляющему сигналу добавляют сигнал, сформированный как сумма производных движения основания относительно оси, параллельной оси вращения платформы. Однако при этом не компенсируется ошибка от сухого трения в опорах платформы. Сухое трение в опорах платформы изменяется при изменении направления движения основания, изменение момента сухого трения возмущает систему стабилизации и вызывает ошибку, доминирующую среди погрешностей гиростабилизатора.
Задачей изобретения является повышение точности гиростабилизатора за счет компенсации возмущающего момента от сухого трения в опорах платформы.
Задача решается тем, что в известном способе гироскопической стабилизации, заключающемся в том, что для стабилизации положения платформы, установленной на основании с возможностью вращения относительно оси, параллельной основанию, определяют угол поворота платформы относительно стабилизируемого положения и скорость изменения угла поворота, определяют угловую скорость основания относительно оси, параллельной оси вращения платформы, формируют управляющий сигнал для управления положением платформы, подают управляющий сигнал на исполнительный двигатель, поворачивающий платформу и компенсирующий моменты, возмущающие стабилизируемую платформу, дополнительно определяют угол поворота платформы относительно основания, в момент изменения знака угловой скорости фиксируют значение угла поворота платформы относительно основания, а к управляющему сигналу добавляют дополнительный сигнал, который формируют в функции отклонения угла поворота основания относительно угла, зафиксированного в момент изменения знака угловой скорости.
Отклонение угла поворота основания относительно угла, зафиксированного в момент изменения знака угловой скорости, определяют путем интегрирования угловой скорости.
Дополнительный сигнал формируют пропорционально зависимости момента сухого трения от угла поворота основания.
Блок-схема устройства, реализующего заявляемый способ гироскопической стабилизации, приведена на фиг.1.
Устройство содержит платформу 1, установленную на подшипниковых опорах 2 и 3 на основании 4 с вращением относительно оси, параллельной основанию 4, исполнительный двигатель 5, установленный на основании 4 и осуществляющий поворот платформы 1, установленный на платформе 1 гироскопический датчик угла 6 с осью чувствительности, параллельной оси вращения платформы 1, установленный на основании 4 датчик угловой скорости 7 с осью чувствительности, параллельной оси вращения платформы 1, и блок управления 8. Входы блока управления 8 соединены с выходами гироскопического датчика угла 6 и датчика угловой скорости 7, а выход подключен к исполнительному двигателю 5.
Устройство работает следующим образом.
Исполнительный двигатель 5, отрабатывая управляющий сигнал, поступающий с блока управления 8, удерживает платформу 1 в стабилизируемом положении, при котором сигнал с гироскопического датчика угла 6 равен нулю. При колебаниях основания 4 вокруг оси вращения платформы 1 система стабилизации испытывает возмущения, под действием которых платформа 1 отклоняется от заданного положения. При колебаниях основания 4 вокруг оси вращения платформы 1 датчик угловой скорости 7 вырабатывает сигнал, пропорциональный угловой скорости основания. Сигнал угловой скорости от датчика 7 поступает на вход блока управления 8, где добавляется к управляющему сигналу для компенсации возмущения от вязкого трения. Кроме того, в блоке 8 из сигнала датчика 7 в функции отклонения угла поворота основания 4 относительно угла, зафиксированного в момент изменения знака угловой скорости, формируется дополнительный сигнал, который добавляется к управляющему сигналу, подаваемому на исполнительный двигатель 5, и препятствует отклонению платформы 1 от заданного положения.
Таким образом, в описанном устройстве для стабилизации положения платформы 1, установленной на основании 4 с возможностью вращения относительно оси, параллельной основанию 4, определяют угол поворота платформы 1 относительно стабилизируемого положения и скорость изменения угла поворота, определяют угловую скорость основания 4 относительно оси, параллельной оси вращения платформы 1, формируют управляющий сигнал для управления положением платформы 1, подают управляющий сигнал на исполнительный двигатель 5, поворачивающий платформу 1 и компенсирующий моменты, возмущающие стабилизируемую платформу 1, дополнительно определяют угол поворота платформы 1 относительно основания 4, в момент изменения знака угловой скорости основания 4 фиксируют значение угла поворота платформы 1 относительно основания 4, а к управляющему сигналу добавляют дополнительный сигнал, который формируют в функции отклонения угла поворота основания 4 относительно угла, зафиксированного в момент изменения знака угловой скорости. Формирование и подача дополнительного сигнала на исполнительный двигатель 5 обеспечивает компенсацию возмущающего момента, обусловленного сухим трением в подшипниковых опорах 2 и 3, и повышение точности стабилизации положения платформы 1.
Отклонение угла поворота основания 4 относительно угла, зафиксированного в момент изменения знака угловой скорости, определяют, в частности, путем интегрирования угловой скорости.
Дополнительный сигнал формируют, в частности, пропорционально зависимости момента сухого трения от угла поворота основания 4.
Использование данного способа позволяет существенно повысить точность гиростабилизаторов, используемых на подвижных объектах, в результате подавления возмущений, возникающих при колебаниях основания в моменты изменения угловой скорости основания. Повышение точности гиростабилизаторов достигается за счет уменьшения на порядок и более составляющей ошибки, обусловленной сухим трением в подшипниковых опорах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНООСНЫЙ ГИРОСТАБИЛИЗАТОР | 1991 |
|
RU2011171C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ДВУХОСНОГО УПРАВЛЯЕМОГО ГИРОСТАБИЛИЗАТОРА И ДВУХОСНЫЙ УПРАВЛЯЕМЫЙ ГИРОСТАБИЛИЗАТОР | 2001 |
|
RU2193160C1 |
| ДВУХОСНЫЙ УПРАВЛЯЕМЫЙ ГИРОСТАБИЛИЗАТОР | 2005 |
|
RU2293949C1 |
| Способ стабилизации гироскопической платформы | 2023 |
|
RU2826509C1 |
| Гироскопический стабилизатор | 1986 |
|
SU1839920A1 |
| СПОСОБ КОНТРОЛЯ ДРЕЙФА ГИРОСКОПИЧЕСКОГО ПРИБОРА | 1994 |
|
RU2115094C1 |
| Система стабилизации изображения на подвижном основании | 2019 |
|
RU2753162C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2004 |
|
RU2260773C1 |
Изобретение относится к гироскопической технике, а именно к управляемым гиростабилизаторам с косвенной стабилизацией, работающим на подвижных объектах. Способ заключается в том, что для стабилизации положения платформы, установленной на основании с возможностью вращения относительно оси, параллельной основанию, определяют угол поворота платформы относительно стабилизируемого положения и скорость изменения угла поворота. Определяют угловую скорость основания относительно оси, параллельной оси вращения платформы, формируют управляющий сигнал, который подают на исполнительный двигатель, поворачивающий платформу и компенсирующий моменты, возмущающие стабилизируемую платформу. Дополнительно определяют угол поворота платформы относительно основания, в момент изменения знака угловой скорости фиксируют значение угла поворота платформы относительно основания, а к управляющему сигналу добавляют дополнительный сигнал, который формируют в функции отклонения угла поворота основания относительно угла, зафиксированного в момент изменения знака угловой скорости. Дополнительный сигнал формируют пропорционально зависимости момента сухого трения от угла поворота основания. Изобретение обеспечивает повышение точности гиростабилизатора за счет компенсации возмущающего момента от сухого трения в опорах платформы. 1 ил.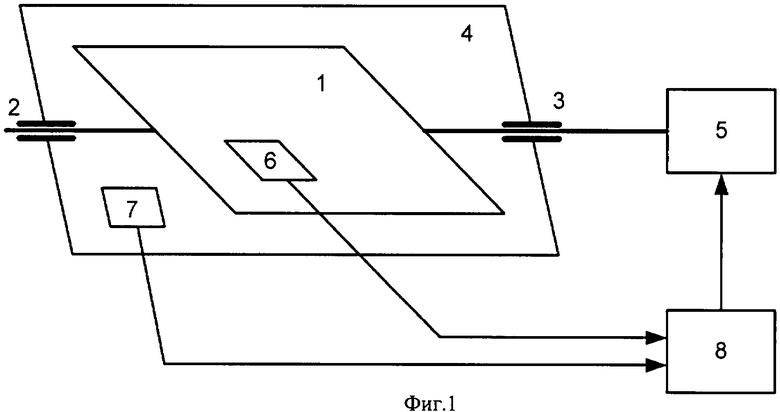
1. Способ гироскопической стабилизации платформы, установленной на основании с возможностью вращения относительно оси, параллельной основанию, заключающийся в том, что определяют угол поворота платформы относительно стабилизируемого положения и скорость изменения угла поворота, определяют угловую скорость основания относительно оси, параллельной оси вращения платформы, формируют управляющий сигнал для управления положением платформы, подают управляющий сигнал на исполнительный двигатель, осуществляющий поворот платформы и компенсирующий моменты, возмущающие стабилизируемую платформу, отличающийся тем, что дополнительно определяют угол поворота платформы относительно основания, в момент изменения знака угловой скорости фиксируют значение угла поворота платформы относительно основания, а к управляющему сигналу добавляют дополнительный сигнал, который формируют в функции отклонения угла поворота основания относительно угла, зафиксированного в момент изменения знака угловой скорости.
2. Способ по п.1, отличающийся тем, что отклонение угла поворота основания относительно угла, зафиксированного в момент изменения знака угловой скорости, определяют путем интегрирования угловой скорости.
3. Способ по п.1, отличающийся тем, что дополнительный сигнал формируют пропорционально зависимости момента сухого трения от угла поворота основания.
| БЕСЕКЕРСКИЙ В.А | |||
| и др | |||
| Динамический синтез систем гироскопической стабилизации | |||
| - Л.: Судостроение, 1968, с.105-124 | |||
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ДВУХОСНОГО УПРАВЛЯЕМОГО ГИРОСТАБИЛИЗАТОРА И ДВУХОСНЫЙ УПРАВЛЯЕМЫЙ ГИРОСТАБИЛИЗАТОР | 2001 |
|
RU2193160C1 |
| US 6531092 B1, 26.02.2002 | |||
| ОДНООСНЫЙ ГИРОСТАБИЛИЗАТОР | 1991 |
|
RU2011171C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПО КРЕНУ ИНЕРЦИАЛЬНОЙ ПЛАТФОРМЫ ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ И СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ ИНЕРЦИАЛЬНАЯ ПЛАТФОРМА | 2003 |
|
RU2256882C2 |
| ОДНООСНЫЙ ГИРОСТАБИЛИЗАТОР | 1999 |
|
RU2213327C2 |
| JP 7071962 A, 17.03.1995 | |||
| Многошпиндельный станок для полирования внутренних поверхностей шаровых и цилиндрических баллонов | 1956 |
|
SU107232A1 |

