Изобретение предназначено для механизации и автоматизации тра}1спортирования изделий внутри нагревательны.к нечей прокатны.х и сортопрокатны.х цехов металлургических заводов.
Известно устройство для трансиортировк изделий в нагревательных печах, состоящее из передаюидего устройства, выиолненного в виде нодвнжной водоохлаждаемой ра.мы, представляющей собой комбинацию из передающи.х балок с уложенными на них нрофилированными рейками, несущи.х балок и механизма горизонтального перемещения.
Предложенное устройство отличается от известного те.м, что концы несущих балок нодвнжной рамы установлены на домкратах гндравлического типа, смонтированных на роликовых опорах. Это улучщает условия обслуживания нечи.
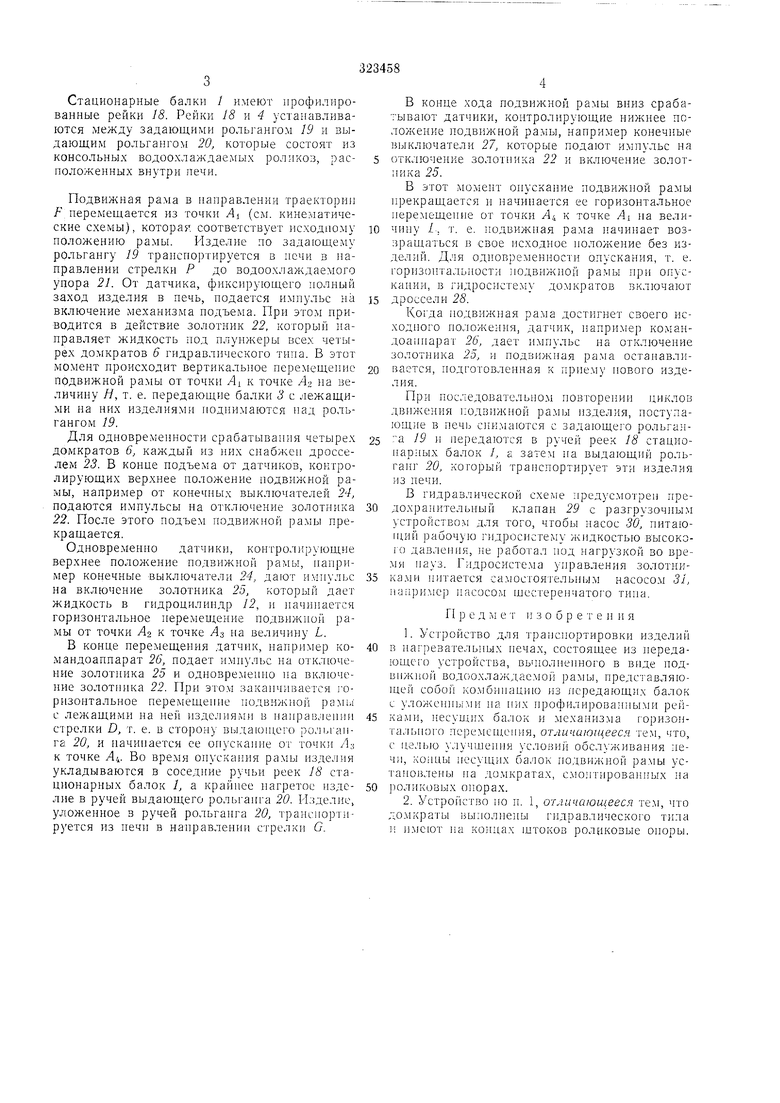
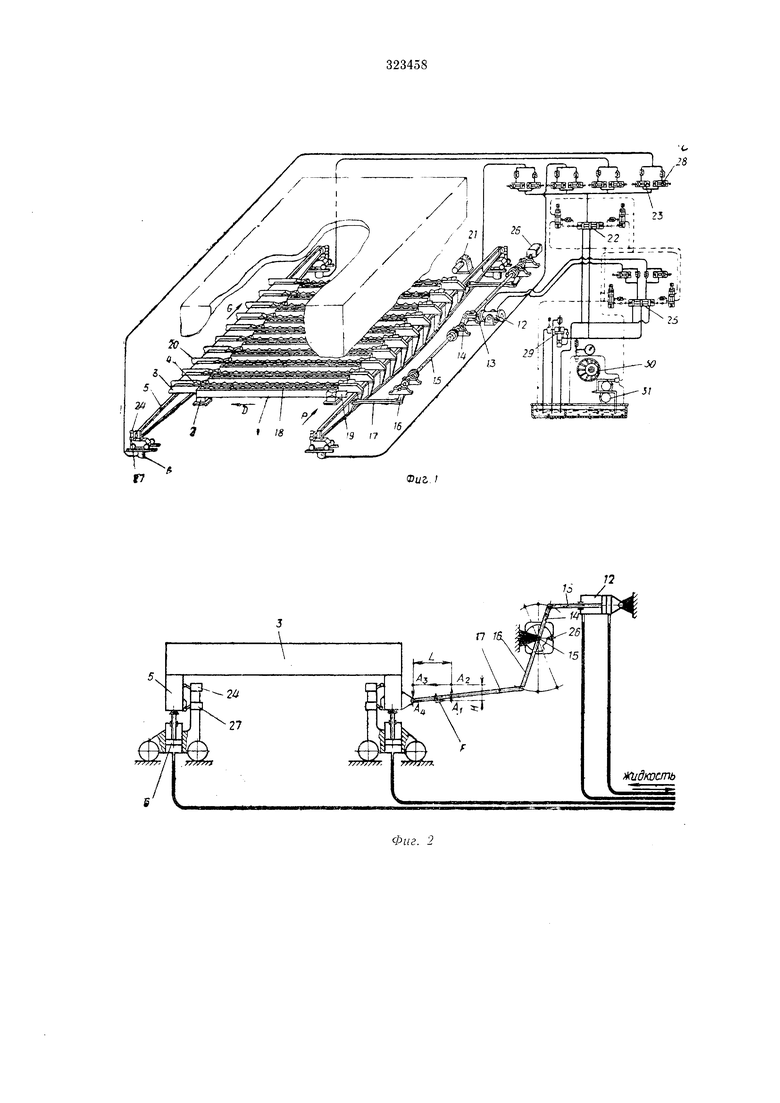
На фнг. 1 иоказано устройство, общий вид; на фиг. 2 - то же, кинематическая схема; на фиг. 3 - схема подвижной нодъемно-катучей опоры.
Устройство для транспортировки изделий состоит из передающего устройства и л еханпзма горизонтального перемещения. Пад подом печи расположены футерованные водоохлаждаемые металлические стационарные балки 1, опирающиеся на оноры 2.
Передающее устройство, вынолнепо в виде водоохлаждаемой рамы, представляющей собой ко.мбинацпю из передающнх балок 3, устаноБле)1ных рядом со стационарными балка.мп с уложепнымн на них ирофилироваинымп рейками 4 совмест)ю с }1есуид,ими ба.чкамп 5. Несущно балки опираю гея на четыре до.мкр;па 6 гидрав.тпческого типа, на концах нггоков которых при iiOMOHui вилки 7 с осью 8 усганозлеиы роликовые опоры 9, например колеса, опирающиеся па рельсы. Для предотвращения разворота опоры 9 в горизонтальной плоскости ось 6 ролика вставлена в верти1 альные наиравляющне 1U. Для ограничения верхнего ноложення подвижной рамы .мо1ут быгь предус.мотреиы жесткие огра П ЧНтели 11, например тяги с регулировочными гайками.
Механизмы горизонтального перемещения подвижной рамы состоит из гидроцил1П дра 12 со щтоком 13, щарнирно соединенных с двуплечим рычагом, нредставляющнм собой рычаг 14, который жестко связан с валом 15 и рычагами 16.
Механизм горизонтального HepeMCHteinui соединен с подвижной рамой толкателями 17, которые щарнирио прпкреилеиы одним своим концом к рычагам 16, а другп.м - к иодвпжпой раме, нанример к основной несущей балке.
Стационарные балки / имеют профилированные рейки 18. PefiKH 18 и 4 устанавливаются между задающими рольгангом 19 и выдающим рольгангом 20, которые состоят из консольных водоохлаждаемых роликоз, расположенных внутри печи.
Подвижная рама в направлении траектории F перемещается из точки Ai (см. кинематические схемы), KOTOpajT соответствует исходному положению рамы. Р1зделие по задающему рольгангу 19 транснортируется в печи в паправлении стрелки Р до водоохлаждаемого упора 21. От датчика, фиксирующего полный заход изделия в печь, подается импульс па включение механизма подъема. При этом приводится в действие золотник 22, который направляет жидкость под плунжеры всех четырех до.мкратов 6 гидравлического типа. В этот момент происходит вертикальное перемещение подвижной рамы от точки /Ь к точке Лз на величину Н, т. е. передающие балки 3 с лежащими на них изделиями поднимаются над рольгангом 19.
Для одновременности срабатывания четырех домкратов 6, каждый из }1их снабжен дросселем 23. В конце подъема от датчиков, контролирующих верхнее положение подвижной рамы, например от конечных выключателей 24, подаются импульсы на отключение золотпика 22. После этого подъем подвижной рамы прекращается.
Одновре.менно датчики, контролирующие верхнее положение подвпжной рамы, папример конечные выключатели 24, дают импульс на включение золотника 25, который дает жидкость в гидроцилиидр 12, и начи11ается горизонтальное перемещение подвижной рамы от точки AZ к точке Лз на величину L.
В конце перемещения датчик, например командоаппарат 26, подает импульс на отключение золотника 25 и одновременно на включе}1ие золотника 22. При этом заканчивается ioризонтальное перемещение подвижной paMi-i с лежащими на Heii изделиями в направлепии стрелки D, т. е. в сторону выда1оп1,его рольганга 20, и начинается ее онускаиие от точки А-;, к точке Л4. Во время опускания рамы изделия укладываются в соседние ручьи реек 18 стационарных балок 1, а крайнее нагретое изделие в ручей выдающего рольганга 20. Пзделне, уложенное в ручей рольганга 20, транспортируется из печи в направлении стрелки G.
В конце хода подвижной рамы вниз срабатывают датчики, контролирующие нижнее положение подвижной рамы, например конечные выключатели 27, которые подают импульс на
отключение золотпика 22 и включение золотника 25.
В этот момент оиускаиие подвижпой рамы прекращается п начинается ее горизонтальное перемещение от точки Л4 к точке AI на величипу /.. т. е. подвижная рама начинает возвращаться в свое исходное ноложение без изделий. Для одновременности опускания, т. е. горизонтальности подвиж)юй рамы при опускании, в гидросистему домкратов включают
дроссели 28.
Когда подвижная рама дост -1гнет своего исходного положения, датчик, напрпмер комапдоаппарат 26, дает импульс на отключеиие золотпика 25, и подвижная рама остапавливается, подготовленная к прие.му нового изделия.
При носледовательпом повторении циклов движения 1:одвижной рамы изделия, поступающие в ne4ij снимаются с задающего рольган а 19 п передаются в ручей реек 18 стационарных балок }, а затем па выдающий рольгапг 20, когорый трапспортирует эти изделия из печи.
В гидравлической схел1е предусмотрен предохранительпый клапан 29 с разгрузочны.м устройством для того, чтобы насос 30, питаю1ЦИЙ рабочую гидросистему жидкостью высоко14) давления, )е работал под пагрузкой во вре.мя пауз. Гпдросисте.ма управления золотниками питается самостоятельным насосом 31, папример пасосом шестеренчатого типа.
П р е д м е т и з о б р е т е п и я
1.Устройство для транспортировки изделий в пагревательпых печах, состоящее из передающего устройства, вьчюлнеппого в виде подвижной водоохлаждаемой рамы, представляющей собой ко.мбипацию из передающи.х балок с уложенными па них профили юваппыми рейками, несунлих ба.ток и .механизма горизоптальио1о пере.мсщепия, отличающееся тем, что, с целью улучшепия условий обслуживания печи, xoimbi несущих балок по.твижной рамы устапов.тены па до.мкратах, с.мо;ггирова1пых па
роликовых опорах.
2.УстроГкугво по п. 1, обличающееся тем, что домкраты выполнены гидравлического типа м и.меют на конпах штоков роликовые оноры.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ТРАНСПОРТИРОВКИ ИЗДЕЛИЙ | 1968 |
|
SU208746A1 |
| Печь для термической обработки изделий | 1978 |
|
SU836153A1 |
| УСТРОЙСТВО для СБОРКИ под СВАРКУ БАЛОК ТАВРОВОГО СЕЧЕНИЯ | 1971 |
|
SU305033A1 |
| Автоматическая линия для изготовления деталей металлической шахтной крепи | 1988 |
|
SU1593732A1 |
| КАНТОВАТЕЛЬ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ | 1996 |
|
RU2107651C1 |
| УСТРОЙСТВО ДЛЯ РАЗБОРКИ СТОПЫ СЛЯБОВ С ПОСЛЕДУЮЩЕЙ ПЕРЕДАЧЕЙ ИХ НА РОЛЬГАНГ | 1991 |
|
RU2015480C1 |
| Устройство для контроля положения изделий в термическом агрегате | 1980 |
|
SU943306A1 |
| НАГРЕВА ДЛИННОМЕРНЫХ ИЗДЕЛИЙ | 1970 |
|
SU267669A1 |
| Пакетирующий рольганг | 1986 |
|
SU1330046A1 |
| Транспортное средство для перевозки крупногабаритных грузов | 1980 |
|
SU937246A1 |
Рк„
Фиг. 2
