Изобретение относится к области автоматического управления .и регулирования и может быть использовано для оптимизации промышленных и других объектов 1регулирО:Ва.ния.
Известные экстремальные регуляторы содержат последовательно соединенные усилитель, и,нтегратор, объект управления и блок вычисления приращен,ия регулируемой величины, причем выход интегратора соединен со входом блока вычисления приращения управляющего воздействия.
Недостатками известных устройСтв являются их сложность, малое быстродействие и малая точность в области экстремума.
Цель изобретения - упрощение регулятора л увел-ичение его быстродействия и точности в области экст;ремума.
Цель достигается тем, что в предлагаемом эКСтремальнОМ регулято;ре дополнительно установлен блок аппроксимации, выполненный в виде двух каналов, каждый из которых содержит последовательно соединенные инвертор, диод..и электромагнитное реле, два лепоДВ.ИЖНЫХ контакта которого подсоединены соответственно ко входу и выходу усилителя, а подвижный - к потенциометру, подвижный контакт соединен со .входом общего для обоих каналов сумматора, причем входы двух усилителей блока аппро ксимации соединены со-ответственно с выходами блока вычисления приращения регулируемой величины и блока вычисления приращения управляющего воздействия, а выход сумматора блока аппроксимации соединен со входо.м усилителя регулятора.
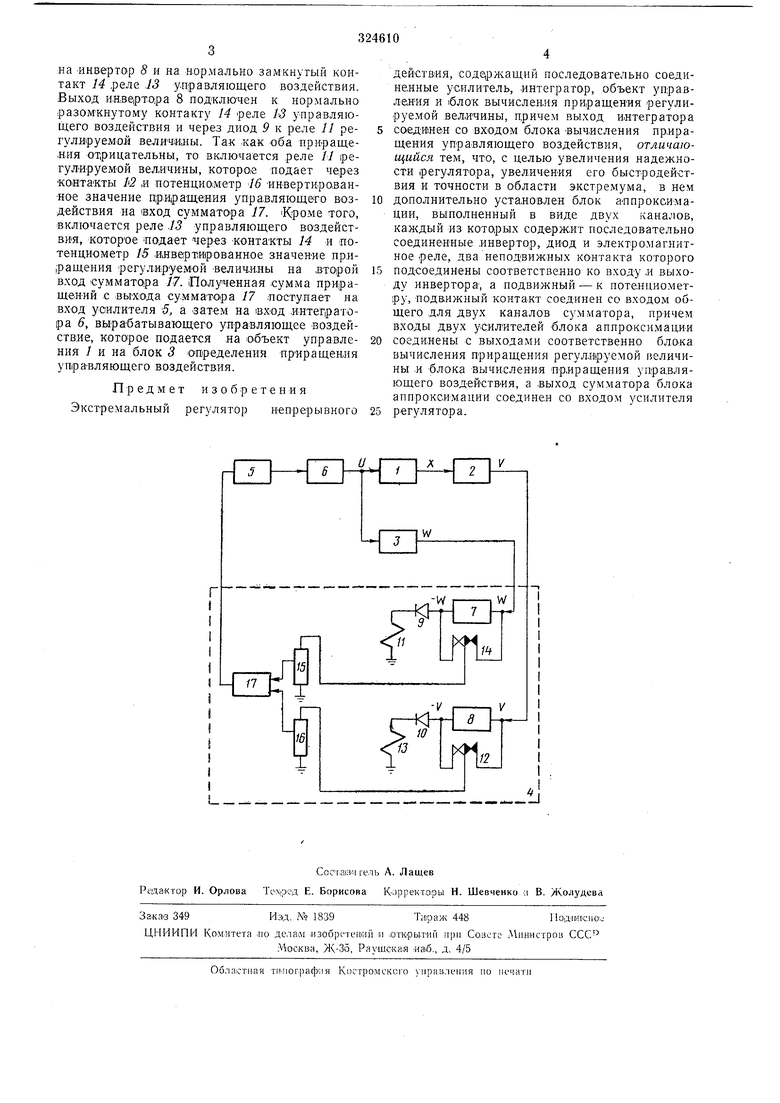
На чертеже изображена блок-схема предлагаемого устройства.
Устройство содержит объект управления 1, блок 2 вычисления приращения регулируемой величины, блок 3 вычисления приращения упра-вляющего воздейстаия, блок аппроксимации 4, усилитель 5, интегратор 6, инвертор регулируемой величины 7 и инвертор управляющего воздействия 8, диоды 9 и 10, реле регулируемой величины 11 с контактами 12 и реле
управляющего воздействия 13 с контактами 14, потенциометры 15 и 16, сумматор 17.
Работает экстремальный регулятор следующим образом. Возмущающее воздействие Z подается на
объект управления / и создает начальное отклонение от экстремума.
В экстремальном регуляторе возможны только четыре вида движений. При движении, например, к минимуму справа блок 2 вычисляет приращение регулируемой величины, а блок 3 - приращение управляющего воздействия, которые в далном случае меньще нуля. Вычисленные значения приращений в виде напряжений поступают на блок аппроксимадии.
Приращение регулируемой величины подается
| название | год | авторы | номер документа |
|---|---|---|---|
| Экстремальный регулятор непрерывного действия | 1973 |
|
SU452806A2 |
| Система экстремального регулирования | 1981 |
|
SU1056132A1 |
| Система управления | 1981 |
|
SU996995A1 |
| Многоканальный регулятор | 1982 |
|
SU1100606A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2369893C1 |
| Система управления | 1983 |
|
SU1168896A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2011 |
|
RU2462744C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
