Изобретение относится к области автоматизации уиравления производственными процессами на карьерах, а именно к устройствам для автоматического управления роторным экскаватором.
Известны устройства для автоматического управления роторным экскаватором, например, выполненные с управляющим блоком, соединенным с блоком ввода программируемых координат, следящими приводами поворота роторной стрелы и хода экскаватора и ключами. Однако эти устройства не обеспечивают автоматического выбора в процессе экскавации толщины стружки, обеспечивающей максимальную техническую производительность экскаватора.
С целью автоматического выбора толщины стружки в процессе экскавации к следящему приводу поворота роториой стрелы устройства для автоматического управления роторным экскаватором подключен блок измерения времени, выход которого соединен с подключенным к следящему приводу хода экскаватора делительным блоком, выход которого соединен с входом запоминающего блока, подключенного к управляющему блоку и блоку ввода программируемых координат, соединенного в свою очередь с выходом блока сравнения, вход которого соединен с запоминающим и делительным блоками.
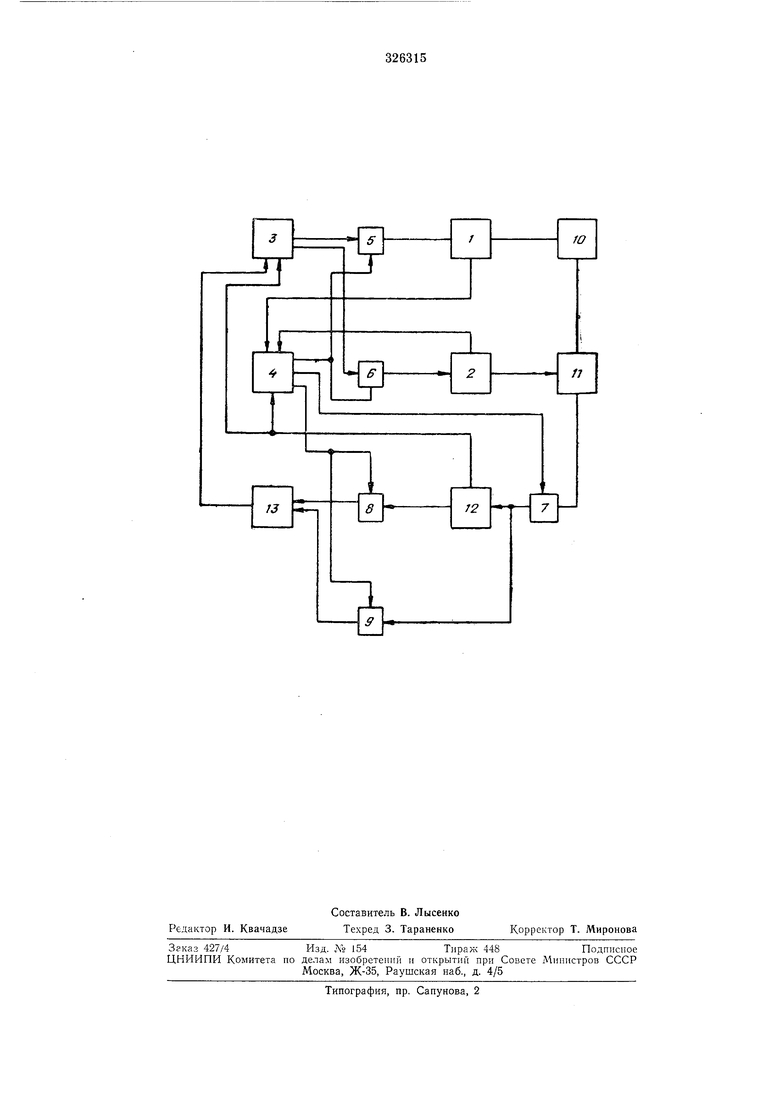
Сущность изобретения поясняется чертежом.
Устройство для автоматического управления роторным экскаватором состоит из следящих приводов 1 поворота роторной стрелы и хода 2 экскаватора, блока 3 ввода программ, управляющего блока 4, ключей 5-9, блока 10 измерения времени, делительного блока 11, запоминающего блока 12, блока
сравнения 13. Блок 3 ввода программ представляет собой внещнее запоминающее устройство, служащее для хранения ходов программируемых координат и выполнения операций приращения координаты перемещения
экскаватора.
Управляющий блок 4 производит извлечение из блока ввода программ кодов координат положений исполнительных механизмов и подачу их в следящие системы приводов в
соответствии с заданным алгоритмом управления. Управляющий блок может быть выполнен в виде распределителя оиераций релейного типа на щаговых искателях. Блок 10 измерения времени отработки реза
выполнен в виде генератора импульсов, включаемого и отключаемого исполнительными реле следящего привода поворота. Запоминаемый блок служит для хранения информации о производительности, достигнутой при отработке предыдущего реза. Блок сравнения 13 предназначен для сравнения величины нроизводительности в двух смежных резах и определения по знаку их разности знака приращения координаты перемещения экскаватора. Устройство работает следующим образом. Перед включением устройства управления экскаватором в блок 3 ввода заносятся координаты нрограммируемых положений привода поворота роторной стрелы (начальное значение 5i наезда экскаватора на толщину стружки и величина приращеннй Ai наезда). После включения системы значения этих координат на команде управляющего блока 4 ключи 5 и 6 подаются в следящие приводы 1 поворота роториой стрелы и хода 2 экскаватора. В ироцессе выполнения реза после наезда экскаватора на толщину стружки 5 это значение со следящего привода 2 хода подается в делительный блок 11. В это же устройство из блока 10 измерения времени реза, соедипенного со следящи.м приводом / поворота, поступает время отработки реза Л. В блоке 11 определяется величина Л , , пронордиоfiнальная средней производительностн в резе (известио, что объем грунта в резе прямо пропорционален толщине стружки). По команде управляющего блока 4, открываюн его ключ 7, значение А нодастся в заномииающий блок 12. Сигнал выполнения этой операции с одного из выходов зано.минающего блока 12 подается в управляющий блок 4 и совместно с сигналами вьшолнення оиераций иоворота и хода, ноступающих от приводов 1 к 2, переводит устройство иа выполнение очередной операции технологического цикла. Одновременно сигнал нодается на вход блока 3 ввода. Этим сигналом на выход устройства ввода подается очередное из занро- 45 гра.ммируемых ноложений механизма иоворота и вводится ириращеиие к величине Si. Поскольку после выполнения первого реза блок сравнения не включается, то знак приращения не определяется. Если (для удобства 50 дальнейшего изложения) принять это приращение положительным, то величина задания на толщину второй стружки 52 . После отработки второго реза предложенным сиособом величины стружки 2 и времени ее отработки /г постунают в делительный блок //, где определяется значение Далее командой управляющего блока 4 открывающей ключ 7 значение подается в запоМЕНЯЮЩИЙ блок 12. Одновременно командой управляющего блока 4 открываются ключи 8 и 5 и на вход блока сравнения 13 подаются значения AI и AZ, которые пропорциональны средней нроизводительности экскаватора в соответствующих резах. В блоке сравнения 13 величины А и А сравнивается и определяется знак очередного приращения ±А5 толщины стружки. Работа устройства при отработке последующих резов не отличается от описанной работы устройства нри отработке второго реза. При достижении в процессе отработки слоя значения толщины стружки, соответствующей максимальной технической производительности, толщина стружки в последующих резах колеблется на ±AS, что при выборе AS достаточно малой практически не сказывается на величине производительности, Предмет изобретения Устройство для автоматического управления роторным экскаватором, включающее унравляющий блок, соединенный с блоком ввода програм-мируемых координат, следящие нриводы поворота роторной стрелы и хода экскаватора и ключи, отличающееся тем, что, с целью автоматического выбора толщины стружки в ироцессе экскавации, к следящему нриводу иоворота роторной стрелы подключен блок измерения времени, выход которого соединен с подключенным к следящему приводу хода экскаватора делительным блоком. выход которого соединен с входом запоминающего блока, подключенного к уиравляющему блоку и блоку ввода программируемых координат, соединенного в свою очередь с выходом блока сравнения, вход которого соединен с запоминающим и делительным блоками.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ С НЕВЫДВИЖНОЙ СТРЕЛОЙ | 1966 |
|
SU214641A1 |
| Устройство для автоматического управления роторным экскаватором | 1971 |
|
SU487989A1 |
| Способ автоматического управления роторным экскаватором | 1983 |
|
SU1157168A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЛЕНТОЧНЫМ | 1973 |
|
SU407050A1 |
| Способ задания скорости поворотного механизма роторного экскаватора | 1979 |
|
SU910942A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЯ РАБОЧЕГО | 1973 |
|
SU374422A1 |
| Устройство для управления роторным экскаватором | 1982 |
|
SU1059073A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |