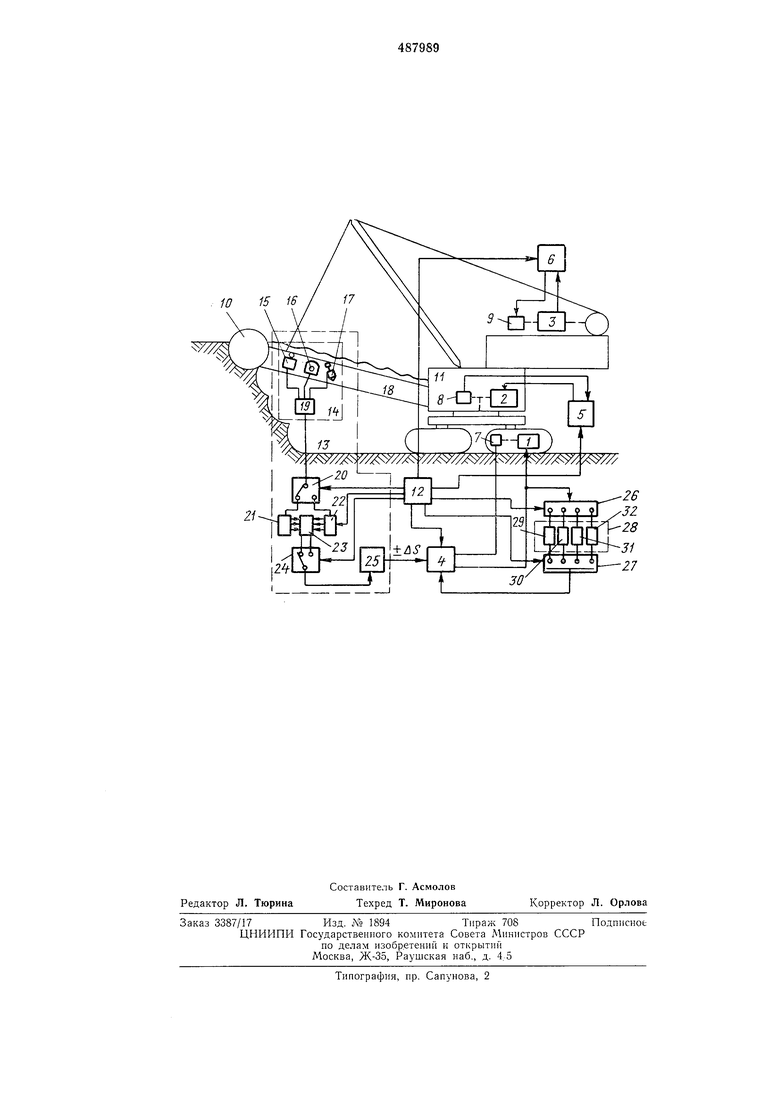
го выдвижения, выполненный из блоков 29, 30, 31 и 32 запоминания оптимальных значений выдвижения, полученных на соответствующих (первом, втором, третьем, четвертом) поду ступах ранее отработанного уступа.
Программируемые коордипаты поворота и подъема заносятся соответственно в блоки 5 и 6 программирования следящих приводов 2 и 3 поворота и подъема. В блок 4 программирования выдвижения заносится произвольно (по усмотрению машиниста) начальная величина выдвижения на толщину реза. По команде с узла 12 управлепия программируемые величины подаются в соответствующие следящие приводы 1, 2 и 3 экскаватора. В процессе выполнения реза, после выдвижения на толщину реза, в вычислительном автокомпенсаторе по сигналам с датчиков 15, 16 и 17 погонной погрузки, угла наклона и скорости движения ленты производится определение величины средней производительности за время реза. Эта величина через коммутатор 20, управляемый узлом 12, поступает на соответствующий регистр 21 или 22 средней производительности четного или нечетного реза. После окончания реза по комапде узла 12 управления в блоке 23 сравпения производится сравнение величин, содержащихся в регистрах 21 и 22, и результат сравнения через переключатель 24 полярности, коммутируемый узлом 12 управления, синхронно с коммутатором 20 воздействует на задатчик 25 приращения подачи. С задатчика 25 на блок 4 программирования выдвижения приходит сигнал на изменение величины последующ,его выдвижения.
После очередного выдвижения на величину реза по команде узла 12 управления все перечисленные операции выполняются в той же последовательности за исключением того, что величина средней производительности по комапде узла 12 заносится через коммутатор 20 в другой регистр 21 производительности. Производится аналогичное сравнение, и результат через переключатель 24 полярности поступает на задатчик 25 приращения подачи.
После каледого сравнения по команде узла 12 управления регистр, в котором содержалась величина, соответствующая производительности в резе, предществующем последнему, очищается для занесения в него величины производительности в следующем резе.
После нескольких резов и соответственно нескольких направленных приращений подачи величина выдвижения достигает оптимального значения, обеспечивающего максимальную техническую производительность экскаватора. Далее при неизменных горногеологических условиях в данном подуступе происходит колебание значения величины выдвижения в каждом резе на + величину приращения около оптимального значения толщины реза, что при выборе достаточно малой величины приращеПИЯ практически не сказывается на производительности экскаватора.
Узел 28 задания начального выдвижения в подустуне работает следующим образом. По отработке каждого нодступа в данном уступе
по команде узла 12 величина оптимальной толщины реза для данного подуступа через входной коммутатор 26 поступает на соответствующий блок 29, 30, 31 или 32 запоминания. При отработке последующего уступа по
команде узла 12 через выходной коммутатор 27 с блока запоминания, соответствующего тому подустуну, который будет отрабатываться, величина оптимальной толщины реза данного подуступа предыдущего уступа поступает
на вход блока 4 программирования и является величиной начального выдвижения в данном подуступе.
Указанные операции задания начальной величины выдвижения производятся перед началом отработки каждого подуступа. Такое прогнозирование сокращает время выбора оптимального значения величины выдвижения в подустунах и соответственно снижает возможные потери производительности за время выбора устройством величины оптимального выдвижения.
Формула изобретения
Устройство для автоматического управления роторпым экскаватором, включающее следящие приводы поворота, выдвижения и подъема с блоками программирования и датчиками координат рабочего органа, узел управления и узел оптимизации величины выдвижения, отличающееся тем, что, с целью повыш:епия производительности роторного экскаватора в работе, установленные на роторной стреле датчики погонной нагрузки,
угла наклона и скорости движения транспортера связапы со входами вычислительного автокомпенсатора, выход которого через коммутатор подключен к регистрам средней производительности четных и нечетных резов, выходы которых через блок сравнения, переключатель полярности и задатчик нриращения подачи связаны с одним из входов блока программирования выдвижения, выход которого подключен посредством коммутатора к блокам запоминания оптима-льных значений выдвижения, связанным также при помощи коммутатора с блоком программирования, причем коммутаторы соединены с узлом унравления,
10
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1972 |
|
SU326315A1 |
| Автоматизированная система управления рабочим процессом роторного экскаватора | 1985 |
|
SU1703797A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Устройство управления механизмом подачи рабочего органа роторного экскаватора | 1983 |
|
SU1093759A1 |
| Цифровая система регулирования скорости центробежного аппарата | 1983 |
|
SU1176302A1 |
| Устройство дозированной подачи роторного экскаватора | 1987 |
|
SU1532662A1 |
| Устройство контроля энергии удара | 1985 |
|
SU1343435A1 |
| Устройство для решения системы алгебраических уравнений | 1981 |
|
SU966702A1 |