Изобретеиие отиосится к области производства твердых схем и иолуироводниковых нриборов и может быть исиользовано в нрецизиоииом оборудованнн для совмеще1П1я рисуика фотои1аблоиа с рисунком подложки ирн фотолитографии.
Сокращение размеров элементов твердых схем и уменьи1ение зазоров между элемеитами для обесиечеиия устойчивой технологии ироцесса фотолитографии требуют иримеиения устройств с гараитироваииой высокой точностью при совмещении и заготовки твердой схемы к фотошаблону ( 0,5 мкм). Для этого используют прецизионный манипулятор, обеспечивающий постоянство положения заготовки твердой схемы в горизонтальной плоскости, прямолинейность ее перемещения по координатам при совмеид,ении и сохраияющий эту точность в момент прижатия заготовки твердой схемы к фотощаблоиу.
Известны микроманипуляторы, содержащие корпус, двухкоординатный поворотный стол, состоящий из трех жестко связанных между собой и установленных один на другом на щариковых оиорах столиков, и систему управления.
Такие манипуляторы сложны по конструкции и не обеспечивают требуемой точности совмещени-я, так как, по существу, опи выполнены пз двух маиииуляторов, одии из которых
представляет собой обычный ма1П пулятор грубой установки с продольной п поперечной каретками, перемещающимися по обычным призматическим направляющим, н связан с рабочим манинулятором нружинной пластнной. При совмен,енпп заготовки твердой схе.мы с фотонгаблоном ведомый манипулятор повторяет все неточности неремен1ен11й по горизонтальным координатам ведуп1,его манинулятора.
Известные маиипуляторы обеспечивают точность совмещения не лучще 1,5 мкм.
Цель изобретения - повыщение точности совмещения за счет точных перемещений по
двум горизонтальным координатам, а также
сохранение достигнутой точности совмещення
в момент нрижатия заготовки к фотошаблону.
Цель достигается тем, что в предлагаемом
манипуляторе двухкоординатный стол выполней в виде плоской каретки с двумя взапмно перпендикулярными касающнмпся в центрах направляющими.
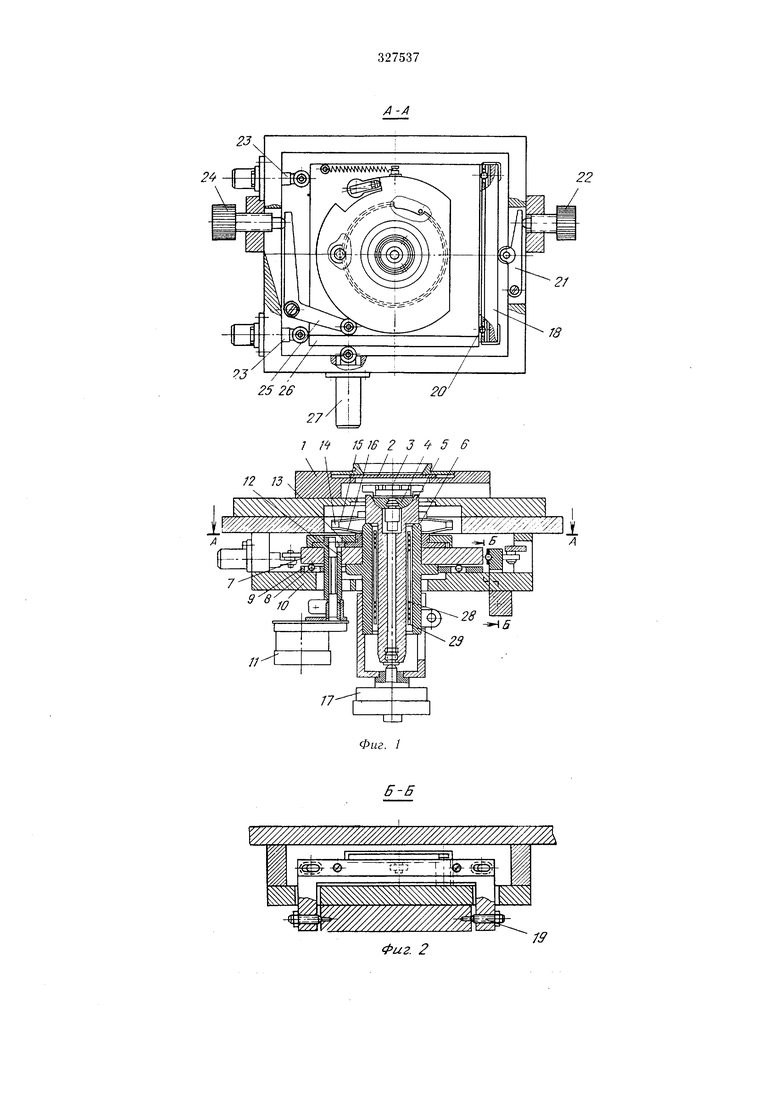
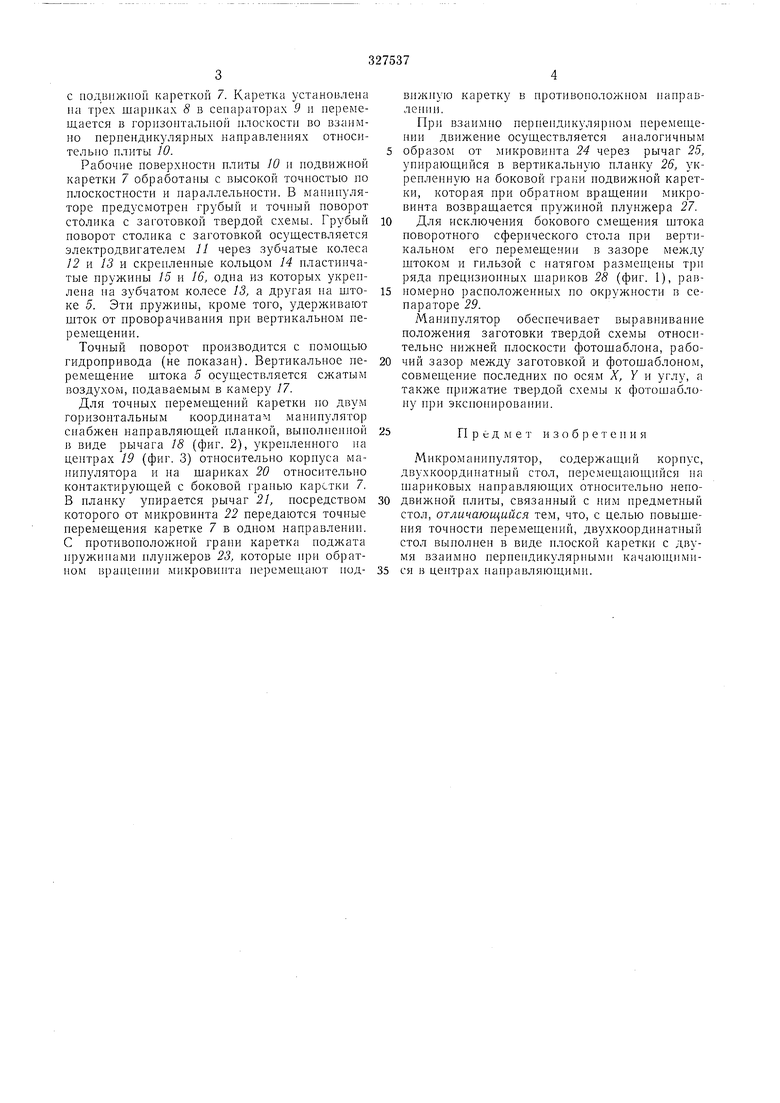
На фиг. 1 показаны конструкция предлагаемого манипулятора в разрезе и сечение по
А-А; на фиг. 2 - сечение по Б-Б па фиг. 1.
Мапипулятор содержпт каретку / с фотощаблопом 2. Для закрепления заготовки 3
с подБижной кареткой 7. Каретка установлена на трех шарнках 8 в сенараторах 9 п неремещается в горизонтальной нлоскостн во взанмно перпендикулярных направлениях относительно плиты W.
Рабочие поверхности плиты 10 и подвижной каретки 7 обработаны с высокой точностью по плоскостности и параллельности. В манипуляторе предусмотрен грубый и точный поворот столика с заготовкой твердой схемы. Грубый поворот столика с заготовкой осуществляется электродвигателем 11 через зубчатые колеса 12 п 13 и скрепленные кольцом М пластинчатые пружины 15 и 16, одна из которых укреплена на зубчатом колесе 13, а другая на штоке 5. Эти пружины, кроме того, удерживают шток от проворачивания при вертикальном перемеш,епии.
Точный поворот производится с помош,ью гидропривода (не показан). Вертикальное перемеш,ение штока 5 осушествляется сжатым воздухом, подаваемым в камеру 17.
Для точных неремещений каретки по двум горизонтальным координатам манипулятор снабжен паправляюш,ей планкой, выполненной в виде рычага 18 (фиг. 2), укренленного на центрах 19 (фиг. 3) относительно корпуса манипулятора и на шариках 20 относительно контактирующей с боковой граиыо каретки 7. В планку упирается рычаг 21, посредством которого от микровипта 22 передаются точные перемещения каретке 7 в одном направлении. С противоположной грани каретка поджата нружинами плунжеров 23, которые при обратном вращении микровинта перемещают иодвнжпую каретку в противоположпом направлении.
При взаимно перпендикуляриом перемещении движение осуществляется аналогичным образом от микровипта 24 через рычаг 25, упирающийся в вертикальиую планку 26, укрепленную на боковой грани подвижной каретки, которая ири обратном вращении микровинта возвращается нрзжиной плунжера 27.
Для исключения бокового смещения штока поворотного сферического стола при вертикальном его перемещении в зазоре между штоком и гильзой с натягом размен,ены трн ряда прецизионных шариков 28 (фиг. I), равномерно расположенных по окружности п сепараторе 29.
Манипулятор обеспечивает выравпиванпе положения заготовки твердой схемы относительпо нижней плоскости фотошаблона, рабочий зазор между заготовкой и фотошаблоном, совмещение последних по осям X, Y и углу, а также прижатие твердой схемы к фотошаблону при эксиопировании.
Предмет изобретен и я
Микроманнпулятор, содержапдпй корпус, двухкоордннатпый стол, неремепинощийся на шариковых направляющих относительно неноДБижной плиты, связанный с ним предметный стол, отличающийся тем, что, с целью повыщения точности перемещеннй, двухкоордннатный стол выполнен в виде плоской каретки с двумя взаимио перпендикулярными качаюидимися в центрах наиравляющимн.
27
in 15 W 2 3 5 В 1
/J
Фиг. 1
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для СОВМЕЩЕНИЯ ЗАГОТОВКИ ТВЕРДОЙ СХЕМЫ С ФОТОШАБЛОНОМ И ЭКСПОНИРОВАНИЯ | 1973 |
|
SU367571A1 |
| УСТРОЙСТВО для СОВМЕЩЕНИЯ ЗАГОТОВОК ТВЕРДЫХ | 1970 |
|
SU259975A1 |
| ВСЕСОЮЗНАЯ П1ТЕЙТ^П-Г^:^;-'>&'?'!:П[-;БИБЛИОт:::кА | 1972 |
|
SU352424A1 |
| УСТРОЙСТВО ДЛЯ ДВУСТОРОННЕГО СОВМЕЩЕНИЯ РИСУНКОВ ПОДЛОЖКИ С РИСУНКАМИ ФОТОШАБЛОНОВ | 1971 |
|
SU414142A1 |
| УСТРОЙСТВО ДЛЯ СОВМЕЩЕНИЯ МИКРОЭЛЕМЕНТОВ | 1970 |
|
SU276703A1 |
| МНОГОПОЗИЦИОННЫЙ ФОТОШТАМП | 1971 |
|
SU418996A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ МИКРОТВЕРДОСТИ | 1970 |
|
SU266317A1 |
| Фотокоординатограф | 1984 |
|
SU1247820A1 |
| УСТАНОВКА КОНТАКТНОЙ ФОТОЛИТОГРАФИИ ДЛЯ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН С БАЗОВЫМ СРЕЗОМ | 2018 |
|
RU2691159C1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ, СОВМЕЩЕНИЯ И ПОЗИЦИОНИРОВАНИЯ | 2000 |
|
RU2160884C1 |